 布谷鳥同創:當前自動駕駛市場有三類需求在快速增長
布谷鳥同創:當前自動駕駛市場有三類需求在快速增長
近日,佐思汽研對布谷鳥同創科技副總裁晉建峰做了專訪:
Q1
請您簡單介紹一下AutoWheel的定位和技術優勢?
晉建峰:Autowheel是布谷鳥科技子品牌,聚焦智能駕駛和車路協同業務。作為國內最早從事域控制器產品開發的技術企業,不僅具有高算力、高安全車規產品研發經驗,同時具備自主知識產權的全棧智能駕駛算法技術能力和整車的系統集成能力。
Q2
AutoWheel怎么看APA、AVP的發展趨勢?
晉建峰:RPA,HPP到最終的AVP是可以給客戶帶來明顯好處的功能,目前主要在單車智能和車路協同兩條技術路線上持續發展,最終還是要看誰的成本更低,成熟度更高才具備大規模推廣的可能。
Q3
您過去的演講中,認為國內企業與國外Tier公司在智能泊車技術上基本處于同一起跑線。這個判斷的依據是什么?
晉建峰:智能泊車功能在起步的時候,國外tier1廠家只有成熟的基于純超聲波雷達的泊車產品,體驗感不好,還會經常剮蹭。對于基于視覺和雷達融合的自動泊車產品來說,大家是同一時間發力。由于泊車功能本身是低速場景,對安全的要求不像ADAS要求的那樣高,進入的門檻也相對低一些,這給了國內的公司很好的趕超機會。目前我們看到國內廠商在這方面已經走到了國外tier1的前面,甚至有國外tier1找國內算法公司為其研發泊車算法的案例。
Q4
AutoWheel的主要產品是域控制器嗎?主要支持哪些自動駕駛芯片和操作系統?
晉建峰:AutoWheel的主要產品包括車端的ADAS/AD域控制器,也包括VBOX,地圖盒子以及EDR等產品;路端的MEC邊緣計算單元。當前主流的NVIDIA,NXP,Renesas,TI等芯片均支持,支持的操作系統包括Linux、QNX、Autosar以及自研的BIOS等。
Q5
我們注意到AutoWheel在車路協同領域也有布局。車路協同的主要需求來自于哪里?
晉建峰:車路協同領域主要聚焦在道路感知系統以及車端的融合型VBOX。
Q6
AutoWheel下設人工智能研究院(天津東麗)、邊緣計算研發中心(深圳南山)和計算機視覺研發中心(沈陽渾南)三大研發中心。各自的分工是什么?
晉建峰:Autowheel人工智能研究院主要從事智能駕駛相關算法,應用軟件以及V2X協議棧開發與測試;邊緣計算研發中心主要從事各類邊緣計算平臺的軟硬件開發與測試;計算機視覺中心主要從事計算機視覺算法研究及相關軟件,中間件開發。
Q7
AutoWheel認為L2.5需要多強的算力才夠?什么樣的傳感器配置才比較合適?
晉建峰:L2.5本身就不是一個標準性的定義,各家的理解也不盡相同。表現比較好的是那種以視覺和激光雷達作為主要感知手段的方案,至少也要幾十個TOPS的算力滿足算法的需求;但是如果對于主要使用1V5R方案的系統來說,也可以實現類似的功能,但是算力要求就小的多了,有幾個TOPS的算力用于前向視覺智能感知目的就好了,一個高功能安全等級的MCU就可以滿足其余的運算要求。所以這個問題本身是個開發性的話題,沒有什么標準答案。
Q8
您怎么看今年的自動駕駛市場?客戶需求主要來自于哪里(泊車,L2.5, L3或其他)?
晉建峰:當前的自動駕駛市場有三類需求在快速增長:第一、應用于乘用車的導航自動駕駛功能,實現的是高階自動駕駛功能,但是需要駕駛員在環,依然算在L2輔助駕駛級別;第二、應用在乘用車的記憶泊車和代客泊車功能,屬于一種低速狀態下的自動駕駛功能;第三、應用于特種場景的無人車,如無人物流車,無人叉車,無人清掃車,無人巡邏車等。
Q9
AutoWheel客戶和合作伙伴分別有哪些?未來發展規劃如何?
晉建峰:AutoWheel的客戶既有OEM也有Tier1,既有自動駕駛算法公司,也有系統集成商。AutoWheel的合作伙伴主要是芯片、算法公司以及系統集成商,也有部分科研院所。
未來的發展主要是以To B業務模式,基于人工智能和邊緣計算技術,交付更多有市場競爭力的產品,服務更多的客戶。
Q10
在AVP標準組組織的中關村AVP示范項目中,貴司主要承擔哪部分工作?
晉建峰:我司主要承擔車端系統的研發與驗證工作,包括域控制器、傳感器在內的整個代客泊車車端系統。
全文
布谷鳥同創5月8日智能泊車論壇演講
演講稿閱讀大約需要3-5分鐘
各位同仁,各位嘉賓,下午好!
我是來自布谷鳥同創的晉建峰,主要負責公司智能駕駛和車路協同業務,今天主要針對泊車場景的方案及發展路線跟大家做個交流分享。
開始之前我想先拿這樣一幅圖作為演講的開場白。
在剛剛結束的上海車展上,各位同仁應該已經看到了很多新的技術以及商業應用上的創新。拿世界經濟論壇主席一句話作為開場:大魚吃小魚的時代已經落幕,我們已經進入了快魚吃慢魚的時代。結合AVP技術目前的發展,完全可以驗證這句話。
舉一個例子,現在路面上在跑的很多量產車,還在使用半自主泊車技術,基于超聲波雷達感知,駕駛過程中自動控制方向盤轉向,駕駛員自己踩剎車,這類車型仍在生產和使用,但是這種技術已經很落后了。
自動駕駛技術的發展非常迅速,也落地了很多實際應用。簡單的梳理一下智能駕駛發展過程,與大家共同探討和思考:面向未來,如何在市場上贏得競爭?
智能駕駛可以分成兩大類場景:第一類是面向開放道路出行,比如行駛在快速路或高速路的出行場景;第二類是基于封閉的場景低速控車,如港口自動駕駛,停車場泊車場景。
在第一類場景中,基于高速出行的L2級別的ACC、AEB系統,功能已經比較成熟。L2.5級別的導航自動駕駛功能,已經在高速路、城市快速路運營,下一步往城市道路上快速發展。
第二類場景中,在APA的基礎上,發展出RPA遙控泊車、記憶泊車,這些技術已經在快速的推向市場。帶12個超聲波雷達和4個環視攝像頭的自動泊車系統,有很多量產車型已經發布,車輛普及率在快速增長。
最終這些技術都會走向一個融合,不管是在高速路還是在快速路,或者在停車場環境內,最終向實現高級別的自動駕駛方向發展 。
泊車系統功能發展
在以上背景下,再來討論泊車。最早出現的泊車系統是基于純超聲波雷達半自動泊車的功能,以沃爾沃S90為代表,當時對該車型做對標測試的時候,發生過不少的刮蹭案例。
中早期的車輛控制都是半自動的,只能控制轉向,之后發展到可以做完整控制轉向、制動、手剎等的純自動泊車APA。
發展到現在,比較主流的是超聲波雷達和環視攝像頭進行融合的系統,這是市面上比較主流的量產方案。和最早期系統比較,已經在很多方面給用戶帶來便利,比如,支持自動泊車的車位類型,包括泊車成功率上,已經有了大大提升。
現在的遙控泊車和記憶泊車,都是在市場需求推動下逐步發展的。大家都在做技術上的嘗試和準備,為了最終能夠實現一鍵泊入和一鍵泊出的AVP功能。
泊車功能關鍵技術發展
剛才簡單回顧了一下泊車系統功能的發展路線,下面講講功能背后涉及的關鍵技術,可以分為以下幾個方面:
01
環境感知能力
最早的純超聲波雷達感知,面臨很多問題,因此很快發展為基于視覺(環視攝像頭)做車位識別和障礙物識別,甚至可以進行融合。發展到今天,已經有4D成像技術的毫米波雷達,傳感器的能力在逐步的提升,這都是泊車功能所需要的。車輛四周的綜合感知能力,是自動泊車功能好壞的基礎。
02
車輛控制模式
現在已經發展的非常好了,早期像燃油車會涉及到不同的車型,不同的關聯件,不同的執行器控制起來非常復雜,需要解決一系列的問題。現在整車控制基本上可以通過中央計算單元,完全控制車聯的轉向、制動等功能。
03
人機交互方式
從司機在車上操作,到司機從車上下來,在距離不遠處遙控泊車,在有些車位比較窄的情況下,防止司機下不了車。很快這種自動泊車動能可以用手機通過遠程的方式操作,這樣的人機交互方式會越來越靠近遠程控制。
04
計算機控制平臺
所有的功能都需要在控制器上運行,這樣一個計算控制平臺從早期算力比較低的MCU方案,到現在算力強大的控制器方案。首先需要有大量的多傳感器接入能力,比如超聲波,攝像頭、雷達等,需要包括對圖像的接入和處理、對毫米波雷達甚至激光雷達數據的處理。同樣會有功能安全和信息安全的考慮,當真的可以實現場端和車端協同控制時,如何抵御互聯網黑客攻擊,保護信息安全,還有很多的問題需要解決和探討。
針對車端介紹幾個典型的系統方案。
系統方案1-超聲波雷達
基于純超聲波雷達的自動泊車功能,擁有12個超聲波雷達的配置,實現SPA的功能,是早期的低成本方案。
系統方案2-超聲波雷達融合環視
針對單超聲波雷達的不足,融合四個環視攝像頭的感知方案,實現的APA功能是當前量產的主流方案,可以支持的泊車類型和應用場景在不斷發展中。
系統方案3-融合1V5R
從傳統ADAS演進的路線,在四個環視攝像頭加上十二個超聲波雷達方案的基礎上,現在稱為L2.5或者L2.9,這樣的高級別輔助駕駛系統方案,一般都會有一個域控制器。這個方案也會融合做一些ADAS功能。除了用環視攝像頭和超聲波雷達對周邊感知之外,加上前向攝像頭或者毫米波雷達對前方感知的能力,在這樣的基礎上可以實現長距離的記憶泊車,可以在過程中實現避障,這種系統方案屬于比較典型的L2.N的ADAS解決方案。
系統方案4-自動駕駛集成
我個人認為這種方案比較適應未來的方向。整個車身會引入更多攝像頭,前向、側向和后端都會有足夠的攝像頭,在中央高算力計算平臺的支持下,有比較高的自主學習能力,加上對多傳感器的感知、融合和處理能力,去實現高級別的代客泊車功能。
以上把泊車從最早的半自動泊車到AVP,從系統功能到技術方案做了一個簡單的梳理。
下面我主要給大家介紹一下布谷鳥同創科技,公司主要的技術和產品是什么?
布谷鳥同創科技(天津)有限公司成立于2019年,以AutoWheel為品牌,聚焦智能駕駛及車路協同業務,下設人工智能研究院(天津·東麗)、邊緣計算研發中心(深圳·南山)和計算機視覺研發中心(沈陽·渾南)三大研發中心,具備智能駕駛及車路協同系統的研發、測試驗證和交付能力,為客戶提供最具市場競爭力的系統解決方案及產品。其中生產制造部分,計算平臺和傳感設備制造分別由關聯的深圳光明工廠和安徽宿松工廠負責。
AutoWheel目前已形成計算平臺、操作系統、智能算法及傳感設備的全系統研發能力和測試驗證能力,具備提供ADAS輔助駕駛系統、AD自動駕駛系統全棧系統解決方案及產品配套服務能力。支持按車系平臺化研發、按車型個性化配置,滿足客戶個性化方案定制,支持汽車全生命周期軟件與數據服務,提高整車性價比。
公司主要的產品包含自動泊車控制器,L2.5 ADAS域控制器,自動駕駛AD域控制器,遠程駕駛域控制器,以及關聯的地圖盒子,EDR等產品。
謝謝大家!
原文標題:布谷鳥同創:國內企業與國外Tier在智能泊車技術上處于同一起跑線
文章出處:【微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
控制器
+關注
關注
112文章
16385瀏覽量
178372 -
智能駕駛
+關注
關注
3文章
2532瀏覽量
48795 -
自動駕駛
+關注
關注
784文章
13839瀏覽量
166551
原文標題:布谷鳥同創:國內企業與國外Tier在智能泊車技術上處于同一起跑線
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何實現自動駕駛規控算法的仿真驗證

新品發布 | TOSUN正式推出GPS轉CAN FD模塊產品,為自動駕駛提供數據支持

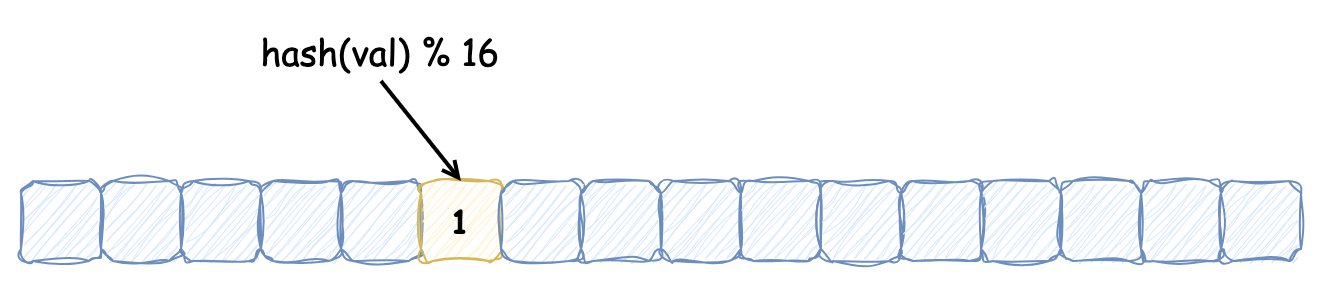
一文理解布隆過濾器和布谷鳥過濾器

重塑線控底盤技術:自動駕駛的未來支柱
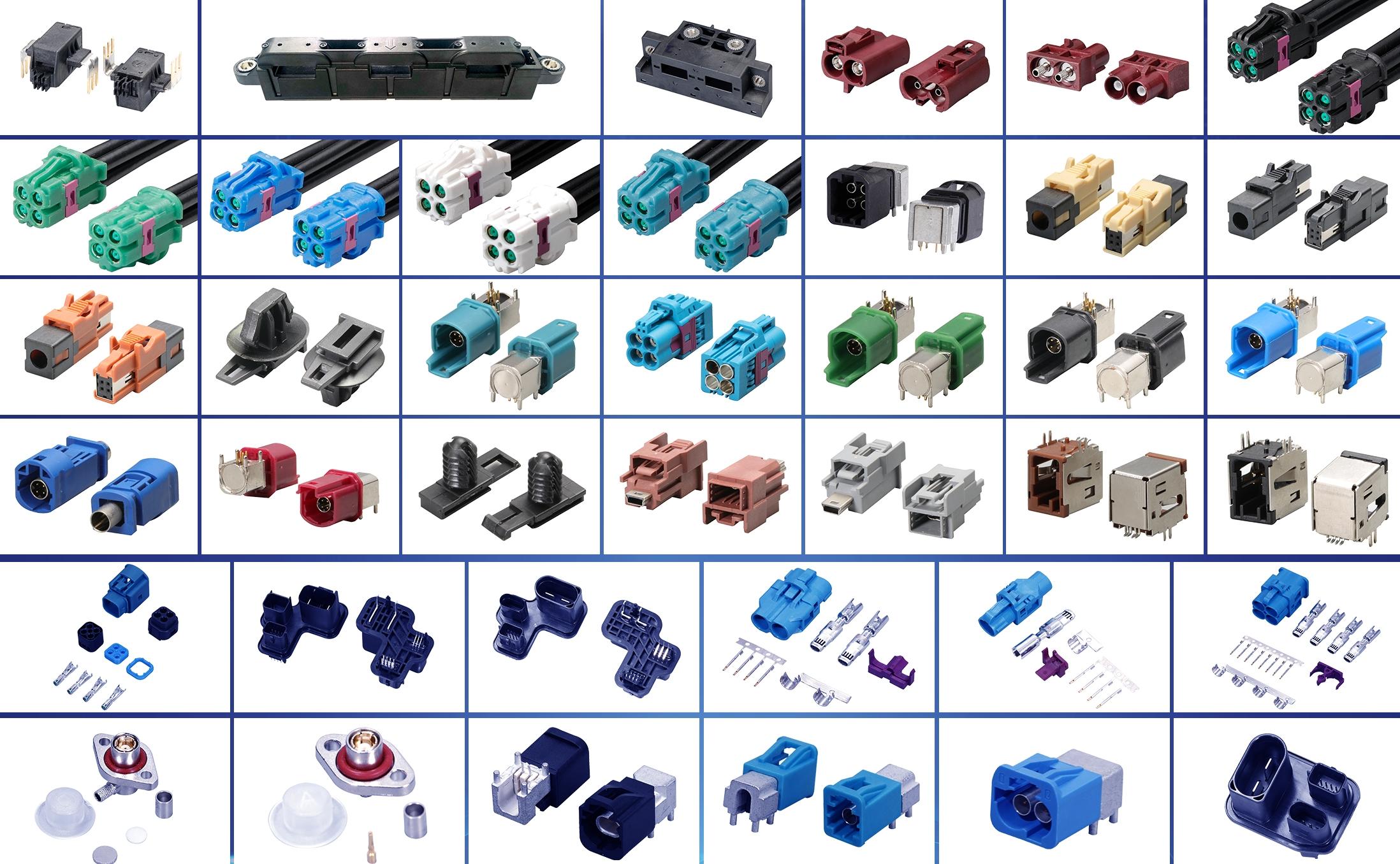
自動駕駛演變下,汽車連接器市場如何擴容?
淺談自動駕駛技術的現狀及發展趨勢

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
嵌入式熱門領域有哪些?
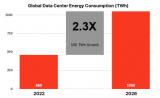
使用AmpereOne遏制快速增長的能源需求





 工商網監
工商網監
評論