 基于PC微機與PLC實現水井電動機遠程監控系統的設計
基于PC微機與PLC實現水井電動機遠程監控系統的設計
1 引 言
在自來水生產企業,采水有一部分來自于遠離廠區的取水井群,取水點往往無人值守,為了實現中控室值班人員對水井電動機的運行情況監測和控制,為濟寧某自來水廠開發了這套遠程監控系統。井群電動機由松下FPlPLC控制,并由電壓、電流變送器采集現場運行數據,利用調制解調器與當地電話網互連。在中控室的微機上,水廠中央控制室的值班人員可以看到水井電動機的運行狀態及電壓電流運行參數,并可以直接控制水井電動機的起停。
2 系統硬件配置及其功能
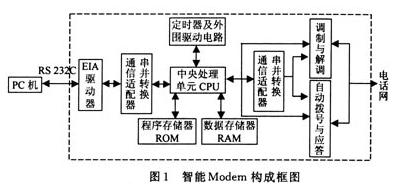
2.1 智能Modem
要實現PC微機與PLC的遠程通信,兩地各采用一臺智能Modem,通過公用電話網連接起來。圖1所示為智能Modem的構造框圖。智能Modem與普通Modem的主要區別是他內部配
置了CPU,這使得智能Modem除了應具有調制解調功能外,還增加了如下新功能:
(1)自動撥號與自動應答功能。
(2)差錯檢測與控制功能。
(3)流量控制功能。
(4)速度變換與協調功能。
(5)遙控功能。
(6)數據壓縮功能等 。
2.2 系統硬件連接及通信原理
進行通信之前先將各設備正確連接,圖2給出連接示意圖。圖中為具有2個串口的FPl機型(該機型型號的后綴為C),他除了有一個RS422 EI可用于編程外,還帶有一個RS232 ,是直接通過RS232 無需適配器的通信方式。對于其他FPl機型,必須配備一個RS422/RS232轉換器(即適配器)。
計算機在通信軟件支持下可以使智能Modem(1)自動撥號,呼叫對方,而對方的智能Modem(2)收到呼叫信號,能自動應答\摘機,從而經過電話交換機在PC和PLC之間建立起通信通路。具體來說,發信方PC機負有下列責任:
①用AT命令設置發信方Modem撥號狀態、撥號方式等。
②在DTR二1(即發信方PC機準備好)條件下,把擬撥的電話號碼發送給發信方Modemo
③通知發信方Modem啟動自動撥號。
發信方智能Modem負有下列責任:
①按PC機送來的電話號碼,生成撥號脈沖,發送到電話網的交換機去。
②按預置的等待時間,等待對方應答。
③當收到對方摘機應答信號時,產生CD信號(載波檢出),通知發信方PC機已收到對方應答,表明通信通道建立,可以通信。
收信方智能Modem負有下列責任:
①當收到電話網上的交換機來的振鈴信號時,置RI=1,表示有呼叫,立即通知收信方PLC。
②在DTR=1(即收信方PLC機準備好)條件下,Modem向電話網發摘機應答信號(載波信號),把Modem與電話網接通。
3 通信參數設置
3.1 PI.C的設置
在通信之前,要先對PLC的傳輸波特率和傳輸格式進行設置o PLC的設置包括兩個方面:軟設置和硬設置。 軟設置是用手持編程器或編程工具軟件FPSOFT向FPl系統寄存器No.412~416寫入控制字來實現的。按照松下PLC產品數據傳輸格式的要求,當PLC通過Modem與計算機進行遠程通信時,應按如下規定設置:選擇RS232口方式與計算機通信;1個停止位\奇校驗\傳輸位數為7位\有結束碼,CR、無起始位;傳輸速率9 600b/so如采用手持編程器,系統寄存器中分別設定如下控制字:No,412,K1;No.413,K2;No.4
14,K1。No.415是站號設定寄存器,最大為32,如設為K1,表示PLC為一號站。如用編程工具軟件FPSOFT,則系統寄存器設置窗口中“No,412 RS232CSelection‘’選擇”Computer Link“,”No.416RS232CModemConnection“應在”Enable“前打”√“,即選為Modem使能。設置完成后,要伴隨一個程序傳人FPl,并且只有當FPl掉電后設置才能生效。
硬設置是指,在PLC的主機上有一個波特率設置開關(在編程口內),分為兩檔,在與計算機進行通信時必須把他放置在”9600“處。
3.2 調制解調器的設置
S寄存器中存放著Modem的運行參數。智能Modem所配置的功能可以由PC機用AT命令對S寄存器進行預置。用于遠程通信的兩個調制解調器在通信過程中起的作用是不同的,所以他們的命令設置也不相同,必須對他們分別設置后方可舉行通信。
與計算機相連的調制解調器(即圖2中的Modem(1))在通信中沒有特殊要求,只要按照通用設置,將其設為出廠時的設置值即可。該設置查Modem手冊可知,為”ATLJ“命令。
與PLC相連的調制解調器(即圖2中的Modem(2))的設置則比較復雜,可以按下面3個步驟進行設置:
(1)首先要將其設置為”開啟自動應答功能“,即使用AT命令賦予寄存器S0一個非零值n.n可以是1-255之間的任一整數,但不能為0。”值同時還表示當調制解調器摘機自動應答一個呼叫之前所檢測到的振鈴次數。
(2)設置DTR(數據終端準備就緒)信號檢測控制命令符“AT&Dn”中的n=0,即不作任何檢測。所謂DTR命令是指只要有一方發出命令即可響應,而不必檢測到雙方都有信號再響應。在這種通信方式情況下必須選擇此功能,因為PLC一方只能被動地接受由計算機發出的命令,而不能主動向計算機發出信號,即每次只要計算機發出命令,Modem(2)就立即進入自動應答狀態,或向PLC發出控制命令,或讀取由PLC來的數據。
(3)為了判斷撥號連接是否成功,還需要用指令ATX0設置調制解調器來提供基本呼叫進程結果碼,用指令ATE0設置調制解調器來關閉字符回顯,用ATV0設置選用數字結果碼應答,AT&W來保存設置。
如果設置成功,調制解調器應當回送結果碼OK,代表命令已執行。兩個調制解調器分別設置完成后,再將其分別接到計算機和PLC上。
4 松下電工的專用通信協議
FPlPLC與計算機的通信中,采用的是松下電工公司專用的通信協議,即“MEWTOCOL-COM”標準協議。在以計算機作為主站,PLC作為從站構成的通信網絡中,通信由主站發起,把命令幀發向從站,從站以響應幀做應答。MEWTOCOL-COM協議對命令幀與響應幀格式做了嚴格規定。其中:%為MEWTOCOL-COM的命令幀開始標志;H,L為站地址的高位與低位;#為站號特征碼;發送文本:由命令碼及數據組成;BCC為塊檢查碼;CR為回車結束符。

(2)響應幀格式
響應幀分兩種:若主站命令幀正確無誤,則用“正確

5 PC機通信程序開發
一般來說,PC微機與PLC的遠程通信實現起來并沒有什么困難,只要為PC機配備該種PLC專用的通信卡和通信軟件及與Modem配套的異步通信軟件,按要求對通信卡進行初始化,并編制用戶程序即可,或購買專業公司的組態軟件,做簡單開發也可。用這種方法存在的惟一問題是價格問題,在PC微機上配上PLC制造廠生產的專用通信模塊及專用通信軟件,常會使PC微機酌價格數倍甚至幾十倍的升高,高級用戶可以利用計算機的軟硬件資源開發出個性化的監控界面,用戶程序可以用匯編語言也可以用高級語言如VB,VC,C/C++等編寫。我們采用的是C語言在直接驅動硬件層次上調用通信功能,編制通信程序,直接對通信硬件訪問,速度最快。通信程序采用模塊結構,包括初始化模塊、Modem驅動模塊、校驗碼生成模塊、成幀模塊、發送模塊、接收模塊及幀處理模塊。模塊間有些是按順序連接,有些是通過對狀態位判別連接起來,有些是對特殊字符(結束符等)的識別連接起來。其中,初始化模塊由計算機串行口的初始化、Modem控制寄存器的初始化組成;編寫Modem驅動程序時,不需BCC校驗,所發送和接收的命令代碼為Modem專用的AT命令代碼。由于整個程序較長,此處省略。
6 結 語
利用電話網這種現成的公用數據網絡,在兩地適當配置智能Modem,可實現個人計算機與異地PLC(網絡)的遠程通信,但由于電話網的速度太慢,不適用于對實時性控制要求較高的場合,常用于遠程故障監視系統及無人值班小型變電站倒閘操作的遙控操作。
責任編輯:gt
-
變送器
+關注
關注
13文章
1378瀏覽量
91061 -
plc
+關注
關注
5010文章
13271瀏覽量
463068 -
監控系統
+關注
關注
21文章
3904瀏覽量
174430
發布評論請先 登錄
相關推薦
KZB-PC電動機主要軸承溫度及振動監測裝置
什么是伺服電動機
【Aworks申請】電動機系統控制器
電動機的啟動方式
使用PLC的高速輸出點控制伺服電動機
智慧污水井物聯網遠程監控案例






 工商網監
工商網監
評論