") 日本科學(xué)家發(fā)表一項機器貓成果
日本科學(xué)家發(fā)表一項機器貓成果
“相比與傳統(tǒng)的通過軟件算法開發(fā)的步態(tài)控制器,這篇文章提出用電路來模擬肌肉的反射,從而決定的腿部的運動,這更像生物的下意思的通過肌肉的伸縮來控制腿部的運動。” 談及日本學(xué)者發(fā)表的一項機器貓成果,來自加州大學(xué)伯克利的博士生李鐘毓如是告訴 DeepTech。
最近,來自日本大阪大學(xué)的谷川豊章(今年 3 月已經(jīng)博士畢業(yè)離校)、増?zhí)锶菀恢獭⑹▽⑷私淌谠?FrontiersinNeurorobotics 雜志上發(fā)表的一篇論文中,向人們展示了有關(guān)四足動物的步行機制的研究成果,而且與以往通過動物實驗研究不同,他們的研究沒有進行任何動物試驗,而是使用自己開發(fā)的四足機器人進行研究。
在四足機器人上,研究團隊進行了不同的步行實驗,從而在沒有動物試驗的情況下在機器人上重現(xiàn)了基于貓的神經(jīng)生理學(xué)實驗。此外,進行步行實驗的四足機器人并沒有中央模式生成器,而是通過電路來模擬肌肉的反射,而試驗發(fā)現(xiàn),沒有中央模式生成器的的四足機器人能夠自動生成穩(wěn)定的步態(tài)模式和腿部軌跡。
有關(guān)四足動物產(chǎn)生運動的機制的研究,尤其是四足動物如何能夠立即對各種環(huán)境干擾做出反應(yīng)并保持平衡且協(xié)調(diào)的運動的機制,過去已經(jīng)有不少的研究。
例如,過去已有研究通過在動物實驗發(fā)現(xiàn),正是四足動物的髖關(guān)節(jié)的角度的改變使他們在從擺動向站立過程成功過渡。但是,這些研究主要關(guān)注的是四足動物站立和擺動階段的個體反射機制,并沒有闡明整個反射回路。
此外,也有其他多項研究表明,對于四足動物的運動的模擬并不需要使用振蕩器模型或復(fù)雜的 CPG 模型(中樞模式發(fā)生器 Central pattern generators),僅僅通過對脊柱反射、身體動力學(xué)和環(huán)境之間的相互作用的建模就可以實現(xiàn)腿部軌跡和穩(wěn)定步態(tài)的模擬。
不過,在這些研究中設(shè)計者將步行運動分為多個階段(例如站立、離地、擺動和觸地階段),并為每個階段設(shè)計了單獨的反射規(guī)則。所以,這些研究沒有解釋這些許多反射規(guī)則是如何集成到動物體內(nèi)的,即產(chǎn)生穩(wěn)定步態(tài)和腿部軌跡的反射回路的整體結(jié)構(gòu)。
在這里首先簡單解釋四足機器人平臺的機械設(shè)計。如下圖所示,每條腿由兩個連桿組成,通過帶動上下旋轉(zhuǎn)關(guān)節(jié),腿可以在矢狀面內(nèi)自由活動。腿部模塊還可以做內(nèi)收和外展運動在側(cè)傾方向上旋轉(zhuǎn);因此,腿具有三個自由度。每個關(guān)節(jié)由無刷直流(BLDC)電機驅(qū)動。有關(guān)腿部模塊的詳細機制,見下圖 B。
四足機器人的控制系統(tǒng),則是由一個用于 BLDC 電機的低級控制器和一個再現(xiàn)肌肉特性和反射的高級控制器組成。
為了模擬四足動物的步行,研究人員將四足動物的腿部肌肉模擬簡化為以下模型。這一模型由模擬髖關(guān)節(jié)(Hipjoint)、伸髖肌(hip extensor)、髖屈肌(hipflexor)、膝踝伸肌(knee-ankleextensor),膝踝屈肌(knee-ankleflexor)和腳趾(Toe)的元素組成。
此外,研究人員還制定了一個反射電路模型,該反射電路模型可以模擬髖關(guān)節(jié)和膝 - 踝伸肌之間的相互興奮性反射、膝 - 踝伸肌的自興奮性反射以及膝 - 踝屈肌到髖伸肌的抑制性反射。
四足機器人的步行實驗
在準(zhǔn)備好四足機器人的各項工作之后,研究人員對四足機器人進行了幾項試驗。
首先,研究人員使用四足機器人進行了步行實驗。在步行實驗開始時,研究人員使機器人的每條腿保持在靜止?fàn)顟B(tài),并將其放在跑步機上以激活反射回路。
試驗發(fā)現(xiàn),即使沒有中央節(jié)奏發(fā)生器或模式發(fā)生器,四足機器人也能產(chǎn)生穩(wěn)定的步態(tài)。下圖 8 顯示了機器人的步態(tài)圖。圖中的 RF、LF、RH 和 LH 分別代表右前腿、左前腿、右后腿和左后腿,彩色區(qū)域表示地面接觸。結(jié)果表明,每條腿的觸地時間是隨著時間逐漸調(diào)整的。在試驗開始 4 秒鐘后,右前 - 后退(RF-RH)和左前后腿(LF-LH)的觸地時間表現(xiàn)區(qū)域相同,這表明,四足機器人開始形成了步伐。
從 6.95 秒開始,當(dāng)右腿觸地時相對于髖關(guān)節(jié)(在 x 軸)和地面(在 z 軸)的腳趾位置。箭頭表示腳趾運動的方向。可以看出,所設(shè)計的反射回路在無需預(yù)先設(shè)計的軌跡的情況下,可以自主產(chǎn)生步行軌跡。
此外,研究人員還使用四足機器人進行了另外兩項試驗,一項是在機器人形成穩(wěn)定的步態(tài)后,刺激肌肉力反饋通路,來模擬腳踝伸肌神經(jīng)受到其他干擾的情況下站立階段的自動延長。從下圖中我們看到,當(dāng)在試驗進行到 2-3.5 秒時研究人員給右后腿(RH)的膝踝伸肌神經(jīng)刺激時,右后腿觸地的時間相應(yīng)延長了 1.37 秒,也就是說四足機器人的站立階段相應(yīng)的延長。
但是在另一個實驗中,當(dāng)研究人員去除所有腿中的相互興奮通路的影響時,發(fā)現(xiàn)四足機器人的步態(tài)不穩(wěn)定。這表明,由交互興奮性反射引起的站立階段的延長對穩(wěn)定步態(tài)的產(chǎn)生有很大貢獻。
這項研究不僅對于理解四足動物的運動機制有著很大的貢獻,也為四足機器人的開發(fā)提供了新的思路。
在被問到這一四足機器人與十分出名的波士頓動力的機器人的區(qū)別與優(yōu)缺點時,李鐘毓博士表示:波士頓動力的機器狗使用的是基于的算法的控制器,直接給出每個關(guān)節(jié)的目標(biāo)位置或者力矩,而并沒有通過電路來模擬肌肉的運動。通過電路的好處是可以模擬復(fù)現(xiàn)生物的通過肌肉和神經(jīng)來控制步態(tài)的本能 -- 動物腦中并沒有一個算法去計算某個關(guān)節(jié)具體的力矩大小,完全是下意識的條件反射。但是這個方法的缺點是并沒有展現(xiàn)出更復(fù)雜,更靈活的步態(tài)。
原文標(biāo)題:基于貓的神經(jīng)生理學(xué)實驗,日本科學(xué)家研發(fā)機器貓
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
電路
+關(guān)注
關(guān)注
172文章
5936瀏覽量
172481 -
機器人
+關(guān)注
關(guān)注
211文章
28512瀏覽量
207500
原文標(biāo)題:基于貓的神經(jīng)生理學(xué)實驗,日本科學(xué)家研發(fā)機器貓
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
西湖大學(xué):科學(xué)家+AI,科研新范式的樣本

AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新》第4章-AI與生命科學(xué)讀后感
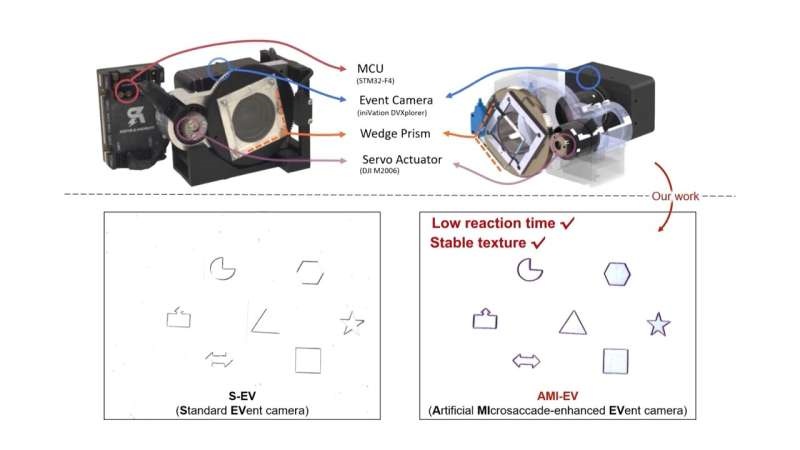
受人眼啟發(fā)!科學(xué)家開發(fā)出新型改良相機
中國科學(xué)家發(fā)現(xiàn)新型高溫超導(dǎo)體
天津大學(xué)科學(xué)家突破人類大腦器官成功驅(qū)動機器人
日本九州大學(xué)開發(fā)了名為QDyeFinder的人工智能(AI)工具
新華社:突破性成果!祝賀我國科學(xué)家成功研發(fā)這一傳感器!

前OpenAI首席科學(xué)家創(chuàng)辦新的AI公司
科學(xué)家研制出一款新型柔性X射線探測器
NVIDIA首席科學(xué)家Bill Dally:深度學(xué)習(xí)硬件趨勢

機器視覺缺陷檢測是工業(yè)自動化領(lǐng)域的一項關(guān)鍵技術(shù)

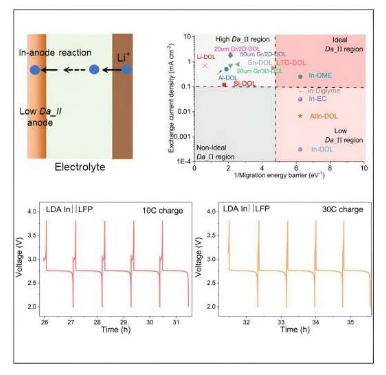
康奈爾大學(xué)科學(xué)家研制出5分鐘快速充電鋰電池
谷歌DeepMind科學(xué)家欲建AI初創(chuàng)公司
飛騰首席科學(xué)家竇強榮獲 “國家卓越工程師” 稱號






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論