") 解析TDOA定位算法中的時(shí)鐘同步
解析TDOA定位算法中的時(shí)鐘同步
在UWB定位系統(tǒng)中,TDOA定位算法那的優(yōu)勢(shì)明顯。我們知道TDOA算法中需要測(cè)量UWB信號(hào)的到達(dá)時(shí)間差。如果說(shuō)TDOA定位的前提是需要測(cè)量到達(dá)時(shí)間差,那么測(cè)量到達(dá)時(shí)間差的前提就是時(shí)間需要同步一致。
(一)認(rèn)識(shí)什么是TDOA的時(shí)鐘同步?
TDOA定位算法采用的是一種到達(dá)時(shí)間差進(jìn)行定位的方法。 UWB標(biāo)簽對(duì)外發(fā)送一次UWB信號(hào),在UWB定位標(biāo)簽覆蓋范圍內(nèi)的所有基站都會(huì)收到無(wú)線信號(hào),因標(biāo)簽距離UWB基站的距離不同,基站收到信號(hào)的時(shí)間點(diǎn)就是不一樣的。
就像小明對(duì)外大聲的吼了一聲“幾點(diǎn)啦?”,分布在周圍的人會(huì)在不同時(shí)間收到聲音信息。如果A在13:22:20接收到信號(hào),B在13:22:21接收到信息,那么這1秒鐘就是到達(dá)時(shí)間差。那么小明到B的距離就比到A的距離遠(yuǎn):聲波的傳播速度×(13:22:21-13:22:20)=340m/s×1s=340m。
但是如果B來(lái)自東京,他習(xí)慣使用東京時(shí)間進(jìn)行計(jì)時(shí),那么在接收到信號(hào)時(shí),B看到的時(shí)間就是14:22:21(東京時(shí)間比北京時(shí)間快1個(gè)小時(shí))。
如果不對(duì)A和B進(jìn)行時(shí)區(qū)換算,那么,信息的到達(dá)時(shí)間差就為1個(gè)小時(shí)零1秒,按剛剛計(jì)算公式計(jì)算,小明到B就比到A遠(yuǎn)了1200多公里。很明顯,這樣計(jì)算出來(lái)的時(shí)間差是沒(méi)有任何意義的,因?yàn)樗麄兪褂貌煌臅r(shí)間體系進(jìn)行計(jì)時(shí),時(shí)間起點(diǎn)不相同,計(jì)算出來(lái)的到達(dá)時(shí)間差也是不準(zhǔn)確的。
所以為了能精確測(cè)量時(shí)間,我們需要對(duì)計(jì)時(shí)工具進(jìn)行時(shí)間調(diào)整,使它們都處于同一時(shí)間體系下,比如說(shuō)大家都是標(biāo)準(zhǔn)的北京時(shí)間,這就是時(shí)間同步。
(二)為什么會(huì)出現(xiàn)UWB基站時(shí)鐘不同步的現(xiàn)象?
每個(gè)UWB定位基站內(nèi)部都有晶體震蕩器,它的作用是產(chǎn)生時(shí)鐘頻率,UWB基站的信號(hào)收發(fā),都是在該時(shí)鐘的節(jié)拍下進(jìn)行的,測(cè)量收發(fā)時(shí)間也是以該時(shí)鐘為基礎(chǔ)。這也就是說(shuō)每個(gè)UWB基站都有自己的內(nèi)部時(shí)鐘,基站各自按照自己的時(shí)間體系運(yùn)行,這就導(dǎo)致各個(gè)UWB基站存在初始的時(shí)間差。
并且,還存在著一個(gè)時(shí)鐘漂移現(xiàn)象,這就使得多個(gè)時(shí)鐘即使在同一個(gè)標(biāo)準(zhǔn)時(shí)間啟動(dòng),它們也不可能長(zhǎng)期保持同步。就像是我們每個(gè)人的手表,走一段時(shí)間后就會(huì)不準(zhǔn)了,主要原因是我們時(shí)鐘的精度,也就是我們手表所走的1s,并不是標(biāo)準(zhǔn)的1s,而是接近1s,長(zhǎng)時(shí)間不對(duì)表的話,我們的時(shí)間體系就會(huì)發(fā)生偏移。
除此之外,影響時(shí)鐘漂移的因素還有很多,如:生產(chǎn)工藝、溫度變化、環(huán)境變化、基站硬件的老化程度等。 綜上所述,時(shí)間不同步問(wèn)題是無(wú)法避免的。
(三)怎樣解決UWB基站的時(shí)鐘不同步問(wèn)題?
我們知道UWB定位系統(tǒng)對(duì)時(shí)間測(cè)量的要求極高,時(shí)間測(cè)量不準(zhǔn)確會(huì)嚴(yán)重影響定位精度,1ns的時(shí)間差就會(huì)造成30cm的位置定位誤差。因此時(shí)鐘不同步問(wèn)題必須要得以解決。目前兩種最常用的解決方式就是有線同步和無(wú)線同步。
1、有線同步
有線同步就相當(dāng)于所有的UWB定位基站都用同一個(gè)表,也就是同步控制器。同步控制器通過(guò)有線通信的方式,將時(shí)間信息傳輸?shù)矫恳粋€(gè)UWB基站,使每個(gè)基站處于同一時(shí)間體系,實(shí)現(xiàn)時(shí)間同步。
這種同步方式的優(yōu)勢(shì)在于時(shí)間測(cè)量精度高,各個(gè)UWB定位基站之間時(shí)間可保持高度同步,并且技術(shù)難度低,容易實(shí)現(xiàn)。存在的問(wèn)題在于部署成本較高,因?yàn)槊總€(gè)基站都需要通過(guò)有線的方式連接到同步控制器,線路規(guī)劃變得很復(fù)雜,部署UWB定位系統(tǒng)時(shí)會(huì)大量布線,但同步精度會(huì)相對(duì)來(lái)說(shuō)會(huì)高一些。如下圖2微能信息的UWB基站VDU2503是采用有線時(shí)間同步的方式。
2、無(wú)線同步
無(wú)線同步就是每一個(gè)UWB定位基站通過(guò)不斷與其他基站交換本基站的時(shí)鐘信息,最終達(dá)到并且保持全局時(shí)間協(xié)調(diào)一致。也就是UWB定位基站之間每隔一段時(shí)間進(jìn)行信號(hào)交互對(duì)表,告訴其他基站自己現(xiàn)在處于什么時(shí)間,然后各自調(diào)整自身時(shí)間與其他基站保持一致。
無(wú)線同步方法依賴于UWB的測(cè)量時(shí)間精度,時(shí)間精度越高,兩個(gè)UWB基站之間的時(shí)間誤差越小,它們的時(shí)間同步程度越高。無(wú)線同步方式的優(yōu)勢(shì)在于基站與基站之間不需要有線連接,因此UWB定位系統(tǒng)的部署難度較低,成本也低。不過(guò)相對(duì)于有線同步,無(wú)線同步的穩(wěn)定性稍差一些。
綜合比較兩種時(shí)鐘同步方法,各有優(yōu)劣。
深圳微能信息科技的UWB基站采用什么時(shí)鐘同步方式?
微能信息現(xiàn)推出的2款UWB基站采用的是有線同步方式,UWB基站的時(shí)鐘同步精度是ps(皮秒)級(jí)別,時(shí)間同步精度可達(dá)到15.6ps 。
編輯:jq
-
晶體
+關(guān)注
關(guān)注
2文章
1377瀏覽量
35708 -
UWB
+關(guān)注
關(guān)注
32文章
1125瀏覽量
61610 -
TDoA
+關(guān)注
關(guān)注
1文章
16瀏覽量
13311 -
震蕩器
+關(guān)注
關(guān)注
1文章
14瀏覽量
8459
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
全院時(shí)鐘同步系統(tǒng)在醫(yī)院的應(yīng)用場(chǎng)景解析

ADS52J90 JESD有時(shí)鐘復(fù)位、CGS、ILAS幾個(gè)同步環(huán)節(jié),怎么確定位于哪個(gè)環(huán)節(jié)?
北斗衛(wèi)星同步時(shí)鐘系統(tǒng):精準(zhǔn)時(shí)間的秘密

京準(zhǔn)電鐘解讀:PTP時(shí)鐘同步系統(tǒng)及應(yīng)用是什么?

京準(zhǔn)時(shí)鐘科普:關(guān)于北斗衛(wèi)星同步時(shí)鐘的那些事?
配網(wǎng)行波故障定位裝置 系統(tǒng)構(gòu)成 廣域時(shí)鐘同步 工程安裝
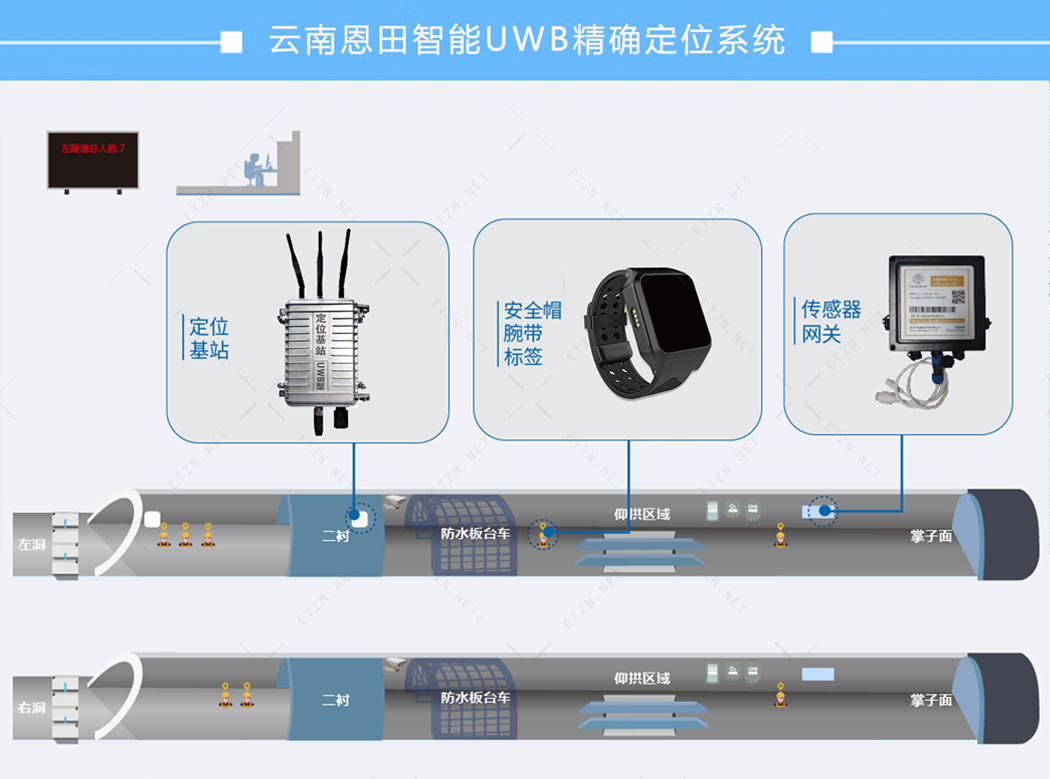
云南恩田隧道 UWB 定位系統(tǒng)應(yīng)用于隧道場(chǎng)景的高精度定位技術(shù)系統(tǒng)
RobustRIO-E模塊 時(shí)鐘同步&分發(fā),實(shí)現(xiàn)聲音與振動(dòng)板卡間及跨機(jī)箱時(shí)鐘同步
主動(dòng)式藍(lán)牙RSSI定位系統(tǒng)和被動(dòng)式藍(lán)牙RSSI定位系統(tǒng)的原理
云南恩田智能隧道人員定位系統(tǒng)在技術(shù)方面的專業(yè)性和創(chuàng)新性
一文帶你了解什么是UWB三角定位、TDoA和PDoA定位
如何利用RTC秒上升沿的原理設(shè)計(jì)一種低功耗、高精確時(shí)鐘同步方案
如何選擇適合自己需求的衛(wèi)星同步時(shí)鐘設(shè)備?

如何解決同步時(shí)鐘系統(tǒng)中的常見問(wèn)題和故障?

GPS衛(wèi)星同步時(shí)鐘的工作原理及應(yīng)用場(chǎng)景介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論