 毫米波雷達在自動駕駛汽車中的作用及應用分析
毫米波雷達在自動駕駛汽車中的作用及應用分析
一直以來,激光雷達因能對周圍環境實現3D感知而備受自動駕駛主流者的“寵愛”。不過無論是激光雷達還是攝像頭、超聲波傳感器,都容易受到惡劣天氣環境影響導致性能降低甚至失效(惡劣天氣環境往往是事故高發的主要原因),因而都存在“致命”缺陷!這眾時候,毫米波雷達憑借可穿透塵霧、雨雪、不受惡劣天氣影響的絕對優勢,且唯一能夠“全天候全天時”工作的超能力,成為汽車ADAS不可或缺的核心傳感器之一。
現在大家購買汽車基本上,都要有以下的輔助駕駛功能,
1. ACC(自適應巡航)
2. BSD&LCA(盲點監測和變道輔助)
3. AEB(自動緊急制動,通常配合攝像頭進行數據融合)
而基本上這些功能都是攝像頭同毫米波雷達輔助一起完成的,理論上只有攝像頭也可以完成,但是回憶瓶頸,使用毫米波雷達可以讓整個系統更加穩定和安全。
什么是雷達
由于我們大學是氣象學院的前身,所以學校里面會非常多雷達接收的天線,大腦里面第一時間想到的就是上圖這樣的雷達場景,如果車上背這么大一個家伙,根本無法行走,所以我們先來看看雷達的工作原理。
雷達是利用無線電回波以探測目標方向和距離的一種裝置,用于無線電探向與測距,全世界開始熟悉雷達是在1940年的不列顛空戰中,七百架載有雷達的英國戰斗機,擊敗兩千架來襲的德國轟炸機,改寫了歷史。二戰后,雷達開始有許多和平用途。
雷達, 是英文RADAR的音譯, 源于Radio Detection and Ranging的縮寫, 意思為“無線電探測和測距”,即用無線電的方法發現目標并測定它們的空間位置,這也揭示了雷達最重要任務就是檢測與目標物體的距離、速度和方向。
毫米波雷達測距原理很簡單,就是把無線電波(毫米波)發出去,然后接收回波,根據收發的時間差測得目標的位置數據和相對距離。根據電磁波的傳播速度,可以確定目標的距離公式為:s=ct/2,其中s為目標距離,t為電磁波從雷達發射出去到接收到目標回波的時間,c為光速。
神奇的多普勒原理
毫米波雷達測速和普通雷達一樣,都是基于多普勒效應(Dopler Effect)原理。當聲音,光和無線電波等振動源與觀測者以相對速度相對運動時,觀測者所收到的振動頻率與振動源所發出的頻率有所不同。當發射的電磁波和被探測目標有相對移動、回波的頻率會和發射波的頻率不同。
當目標向雷達天線靠近時,反射信號頻率將高于發射機頻率;反之,當目標遠離天線而去時,反射信號頻率將低于發射機頻率。由多普勒效應所形成的頻率變化叫做多普勒頻移,它與相對速度成正比,與振動頻率成反比。
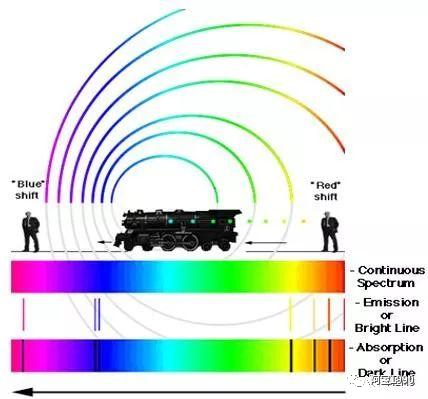
所以,通過檢測這個頻率差,可以測得目標相對于雷達的移動速度,也就是目標與雷達的相對速度。根據發射脈沖和接收的時間差,可以測出目標的距離。同時用頻率過濾方法檢測目標的多普勒頻率譜線,濾除干擾雜波的譜線,可使雷達從強雜波中分辨出目標信號。所以脈沖多普勒雷達比普通雷達的抗雜波干擾能力強,能探測出隱蔽在背景中的活動目標。
毫米波的頻段在哪兒
毫米波(millimeter wave )波長為 1~10 毫米的電磁波稱毫米波,它位于微波與遠紅外波相交疊的波長范圍,因而兼有兩種波譜的特點。
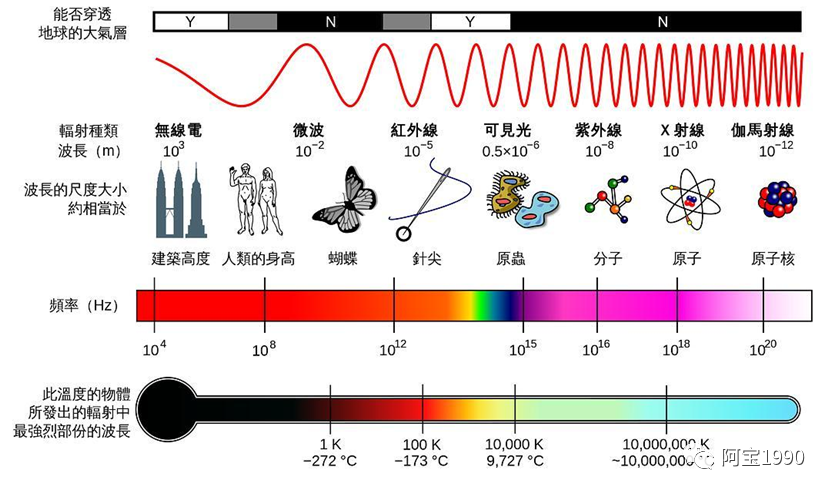
根據波的傳播理論,頻率越高,波長越短,分辨率越高,穿透能力越強,但在傳播過程的損耗也越大,傳輸距離越短;相對地,頻率越低,波長越長,繞射能力越強,傳輸距離越遠。所以與微波相比,毫米波的分辨率高、指向性好、抗干擾能力強和探測性能好。與紅外相比,毫米波的大氣衰減小、對煙霧灰塵具有更好的穿透性、受天氣影響小。這些特質決定了毫米波雷達具有全天時全天候的工作能力。
它具有以下主要特點:
?極寬的帶寬:通常認為毫米波頻率范圍為 26.5~300GHz,帶寬高達 273.5GHz。超過從直流到微波全部帶寬的 10 倍。即使考慮大氣吸收,在大氣中傳播時只能使用四個主要窗口,但這四個窗口的總帶寬也可達 135GHz,為微波以下各波段帶寬之和的 5 倍。這在頻率資源緊張的今天無疑極具吸引力。
?波束窄:在相同天線尺寸下毫米波的波束要比微波的波束窄得多。例如一個 12cm 的天線,在 9.4GHz 時波束寬度為 18 度,而 94GHz 時波速寬度僅 1.8 度。因此可以分辨相距更近的小目標或者更為清晰地觀察目標的細節。
?與激光相比:毫米波的傳播受氣候的影響要小得多,可以認為具有全天候特性。
?和微波相比:毫米波元器件的尺寸要小得多。因此毫米波系統更容易小型化。
大氣窗口和毫米波雷達的頻段劃分
通常大氣層中水汽、氧氣會對電磁波有吸收作用,目前絕大多數毫米波應用研究集中在幾個“大氣窗口”頻率和三個“衰減峰”頻率上。所謂的“大氣窗口”是指電磁波通過大氣層較少被反射、吸收和散射的那些透射率高的波段。如圖3,我們可以看到毫米波傳播受到衰減較小的“大氣窗口”主要集中在35GHz、45GHz、94GHz、140GHz、220GHz頻段附近。而在60GHz、120GHz、180GHz頻段附近衰減出現極大值, 即“衰減峰”。一般說來, “大氣窗口”頻段比較適用于點對點通信,已被低空空地導彈和地基雷達所采用,而“衰減峰”頻段被多路分集的隱蔽網絡和系統優先選用,用以滿足網絡安全系數的要求。
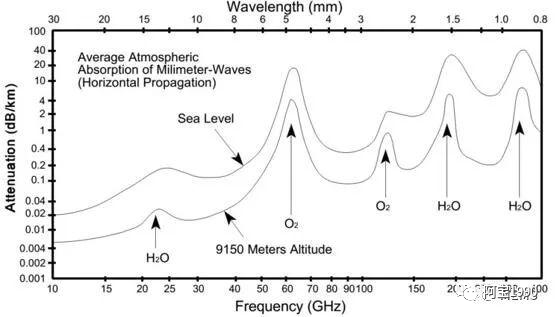
毫米波這個波段頻率很高,但是這個頻段里很多頻率區域的電磁波在空氣里傳播很容易被水分子、氧氣吸收,所以可用的就是幾個典型的頻段,24、60、77、120GHz。當然24GHz很特別,他嚴格來講不是毫米波,因為它的波長在1cm左右。但是它是最早被利用的。現在各個國家把24GHz劃出來可以民用,77GHz劃分給了汽車防撞雷達,24Ghz也在汽車里用得最早。

24GHz將被更高頻代替。由于歐洲電信標準協會和美國聯邦通信委員會制定了頻譜法規和標準,24GHz的UWB將被淘汰。截至2022年1月1日,24GHz超寬帶將不再允許在歐洲和美國用于工業用途。60GHz頻段的射頻使用不受法規的限制,因此60GHz成為全球工業環境中雷達傳感應用的良好替代方案。60GHz的使用將會使得波長變短。由于更長的波長需要更大的天線陣列,但是,當波長變短時,可以使天線陣的尺寸減到最小,從而達到相同的性能。
毫米波雷達發展歷程
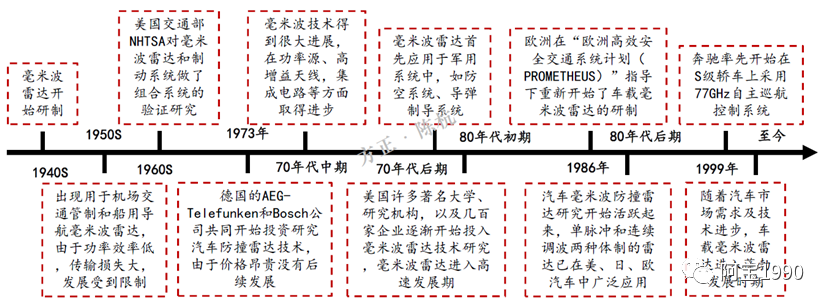
可以看到毫米波雷達在1940年開始研制,真正在汽車上開始研發是1973年,由于價格太昂貴推遲了一段時間,在1986左右開始在汽車上商用,真正在汽車蓬勃發展是在1999年奔馳S級上使用77GHz自主巡航控制系統。
文章出處:【微信公眾號:深圳市汽車電子行業協會】
責任編輯:gt
-
雷達
+關注
關注
50文章
2948瀏覽量
117658 -
毫米波
+關注
關注
21文章
1925瀏覽量
64874 -
自動駕駛
+關注
關注
784文章
13854瀏覽量
166582
原文標題:【行業資訊】自動駕駛傳感器之毫米波雷達(一)基礎篇
文章出處:【微信號:qidianxiehui,微信公眾號:深圳市汽車電子行業協會】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
毫米波雷達的基頻和調制技術 毫米波雷達在機器人導航中的應用
毫米波雷達技術優勢分析 毫米波雷達在安防監控中的應用
康謀技術 | 高效環境感知:毫米波雷達數據采集、可視化及存儲方案



恩智浦展示汽車毫米波雷達最新解決方案
FPGA在自動駕駛領域有哪些應用?
基于毫米波雷達的手勢識別算法
毫米波雷達在日常生活中的應用






 工商網監
工商網監
評論