

在工業(yè)自動(dòng)化中,步進(jìn)電機(jī)的應(yīng)用非常的廣泛。例如工業(yè)機(jī)器人、3D打印機(jī)、計(jì)算機(jī)硬盤等都有步進(jìn)電機(jī)的身影。傳統(tǒng)的步進(jìn)電機(jī)可以控制轉(zhuǎn)子的角度位置,而不需要傳感器來控制位置,是一種開環(huán)控制系統(tǒng)。
但隨著伺服閉環(huán)控制在高速度,高響應(yīng),高精度這“三高”上表現(xiàn)越來越出色,步進(jìn)電機(jī)也開始往閉環(huán)控制上發(fā)展。越來越多廠商推出一體化閉環(huán)電機(jī),填補(bǔ)開環(huán)的步進(jìn)電機(jī)和高性能伺服電機(jī)中間階段的空白。當(dāng)然有人說步進(jìn)電機(jī)沒有必要閉環(huán)控制,使用時(shí)不超過它的允許范圍內(nèi)使用就可以。閉環(huán)控制的步進(jìn)電機(jī)肯定有其價(jià)值, 它針對(duì)那些有高要求但又不至于使用伺服電機(jī)的場(chǎng)景, 給市場(chǎng)更多的選擇。
閉環(huán)控制下步進(jìn)系統(tǒng)精度提升
首先,大家都知道,步進(jìn)系統(tǒng)便宜過伺服系統(tǒng)很多。因?yàn)槠涑杀镜? 在自動(dòng)控制領(lǐng)域步進(jìn)系統(tǒng)占有率還是很高的, 但步進(jìn)系統(tǒng)存在丟步的可能性。雖然有微步驅(qū)動(dòng)可以提高步進(jìn)電機(jī)的準(zhǔn)確性, 但微步并不是完全可靠。 有了閉環(huán)控制器, 步進(jìn)系統(tǒng)精度一點(diǎn)不比伺服差了, 只是速度肯定還是沒法和伺服比。步進(jìn)電機(jī)配合閉環(huán)控制以及光柵尺基本可以實(shí)現(xiàn)全閉環(huán)控制,免除機(jī)械誤差。在成本遠(yuǎn)小于伺服系統(tǒng)的情況下定位精度能達(dá)到傳統(tǒng)步進(jìn)電機(jī)無法達(dá)到的層次。
閉環(huán)步進(jìn)電機(jī)不是單純給步進(jìn)電機(jī)配一個(gè)編碼器,而是按照伺服電機(jī)系統(tǒng)的工作原理進(jìn)行設(shè)計(jì)開發(fā)。目前最廣泛應(yīng)用的是電機(jī)專用DSP芯片,采用32位的DSP做為主處理器,以保證整個(gè)系統(tǒng)的高響應(yīng)和高速,可以做到每隔25微秒就可以調(diào)整一次電機(jī)的電流,同時(shí)也會(huì)配置編碼器。
Leadshine 42CME系列就是應(yīng)用最新的電機(jī)專用DSP芯片和閉環(huán)控制技術(shù)。42CME是采用了1000線的增量光電編碼器,轉(zhuǎn)矩可以保持在0.2~0.8 N?m。在精度上較普通電機(jī)有很明顯的提升,步距角可以控制在±0.09°。精度的提高意味著步進(jìn)電機(jī)不再為個(gè)別阻力點(diǎn)的安全而降低速度和效率。在阻力點(diǎn)丟失的脈沖,控制器會(huì)在阻力點(diǎn)過后自動(dòng)恢復(fù)速度, 并加速補(bǔ)償回丟失的脈沖。

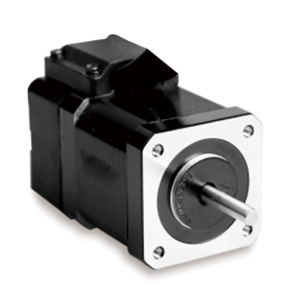
(圖源:Leadshine官網(wǎng))
步進(jìn)系統(tǒng)閉環(huán)解決丟步與過沖
對(duì)于伺服電機(jī)來說,在由高速轉(zhuǎn)為低速時(shí),不可避免地要過沖一段距離,然后再糾正。簡(jiǎn)單點(diǎn)說控制器發(fā)一個(gè)脈沖給伺服電機(jī)時(shí),伺服電機(jī)往往不是走一個(gè)脈沖,而是走3個(gè)脈沖,然后回退2個(gè)脈沖。在某些特定運(yùn)動(dòng)場(chǎng)合,這種過沖是不允許存在的。恰好的是,步進(jìn)電機(jī)的特點(diǎn)就是不會(huì)過沖,結(jié)合步進(jìn)電機(jī)自身的特點(diǎn)和伺服閉環(huán)的控制方式,在此類運(yùn)動(dòng)場(chǎng)合中有很大的應(yīng)用空間。
這里可以看一下是全球有名的步進(jìn)系統(tǒng)制造商日本東方電機(jī)。他們著重推的也是集開閉環(huán)控制一體的αSTEP步進(jìn)電機(jī)。在位置偏差不到±1.8°工況下,還是采用開環(huán)模式,電機(jī)運(yùn)行波形與脈沖指令基本吻合無延遲。在過載位置偏差達(dá)±1.8°后,切換至閉環(huán)控制對(duì)外力影響進(jìn)行修正。

(圖源:東方電機(jī)官網(wǎng))
在標(biāo)準(zhǔn)的42系列里,轉(zhuǎn)矩覆蓋0.3 ~0.77N?m。編碼器選擇的是自家研發(fā)的ABZO機(jī)械絕對(duì)編碼器,可以利用電動(dòng)機(jī)軸檢測(cè)±900 轉(zhuǎn)(1800次旋轉(zhuǎn))的絕對(duì)位置。東方電機(jī)推出的號(hào)稱永不丟步的步進(jìn)電機(jī)在降速曲線不夠的情況下, 出現(xiàn)過沖或丟步,電機(jī)會(huì)自動(dòng)回位糾正。整過過程中加減速都經(jīng)過幾百級(jí)的速度平滑過渡, 不會(huì)有任何突然的振動(dòng)或變化。
小結(jié)
市面上其實(shí)有很多電機(jī)產(chǎn)商也推出不少結(jié)合閉環(huán)控制的步進(jìn)電機(jī),這里不一一列舉,總的趨勢(shì)來看步進(jìn)電機(jī)是朝著閉環(huán)或者說混合的方向在發(fā)展。這種趨勢(shì)會(huì)使步進(jìn)系統(tǒng)逐漸進(jìn)入高精度要求的機(jī)器,填補(bǔ)開環(huán)步進(jìn)和高性能伺服中間斷檔的空缺。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3162瀏覽量
149331 -
閉環(huán)控制
+關(guān)注
關(guān)注
0文章
94瀏覽量
15850
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別是什么?
不同
步進(jìn)電機(jī)開環(huán)控制無反饋;伺服電機(jī)閉環(huán)控制能直接對(duì)電機(jī)編碼器反饋信號(hào)進(jìn)行采樣,性能更為可靠
發(fā)表于 06-18 13:27
開源閉環(huán)步進(jìn)電機(jī)控制器(原理圖+源代碼)
開源閉環(huán)步進(jìn)電機(jī)控制器(原理圖+源代碼),采用PID算法控制,AS5047磁性角度檢測(cè)傳感器,高效防失步,快速學(xué)習(xí)PIDS算法,掌握單片機(jī)系
發(fā)表于 03-20 13:32
步進(jìn)電機(jī)如何自適應(yīng)控制?步進(jìn)電機(jī)如何細(xì)分驅(qū)動(dòng)控制?
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的電機(jī),廣泛應(yīng)用于各種自動(dòng)化控制系統(tǒng)中。為了提高步進(jìn)電機(jī)
伺服電機(jī)與步進(jìn)電機(jī)的性能比較區(qū)別有哪些?
的區(qū)別之一。 伺服電機(jī) :伺服電機(jī)是一種閉環(huán)控制系統(tǒng),它通過電機(jī)內(nèi)部的編碼器反饋來精確控制電機(jī)的
其利天下技術(shù)·無刷電機(jī)中開環(huán)控制和閉環(huán)控制的區(qū)別·無刷電機(jī)驅(qū)動(dòng)方案
無刷電機(jī)驅(qū)動(dòng)方案中的開環(huán)控制和閉環(huán)控制是兩種不同的控制策略,各有其原理和應(yīng)用場(chǎng)景。作為無刷電機(jī)驅(qū)動(dòng)方案開發(fā)商,經(jīng)常會(huì)有客戶或者同行交流過程中
Made with KiCad:CAN 總線步進(jìn)電機(jī)閉環(huán)控制板
盤的屬性詳情。還可以在原理圖中與AI小助手互動(dòng),幫您更高效地學(xué)習(xí)設(shè)計(jì)細(xì)節(jié):
CAN 總線的步進(jìn)電機(jī)控制板。
概覽
這款兩相電機(jī)步進(jìn)
發(fā)表于 09-20 14:14
DACx1001實(shí)現(xiàn)超高精度閉環(huán)控制系統(tǒng)設(shè)計(jì)
電子發(fā)燒友網(wǎng)站提供《DACx1001實(shí)現(xiàn)超高精度閉環(huán)控制系統(tǒng)設(shè)計(jì).pdf》資料免費(fèi)下載
發(fā)表于 09-14 09:34
?0次下載

步進(jìn)電機(jī)的伺服控制方法有哪些
步進(jìn)電機(jī)的伺服控制方法主要包括以下幾種: 1. 位置模式 定義 :在位置模式下,步進(jìn)伺服電機(jī)根據(jù)輸入的位置指令,通過
什么是開環(huán)控制什么是閉環(huán)控制 開環(huán)和閉環(huán)控制有何主要區(qū)別
開環(huán)控制與閉環(huán)控制是兩種常見的控制方式,在工程、物理、生物等多個(gè)領(lǐng)域都有廣泛的應(yīng)用。 一、開環(huán)控制 開環(huán)控制的概念 開環(huán)
閉環(huán)控制的主要組成包括什么
閉環(huán)控制,又稱為反饋控制,是一種常見的控制方式,其主要特點(diǎn)是在控制系統(tǒng)中引入反饋環(huán)節(jié),通過測(cè)量系統(tǒng)的輸出與期望值之間的誤差,來調(diào)整系統(tǒng)的輸入,使系統(tǒng)的輸出盡可能接近期望值。
雙閉環(huán)控制過程有哪些特點(diǎn)
雙閉環(huán)控制系統(tǒng)是一種在工業(yè)自動(dòng)化領(lǐng)域廣泛應(yīng)用的控制策略,它通過兩個(gè)閉環(huán)控制回路來實(shí)現(xiàn)對(duì)系統(tǒng)性能的精確控制。這種控制策略具有很多優(yōu)點(diǎn),如穩(wěn)定性
開環(huán)控制和閉環(huán)控制的特點(diǎn)是什么
控制系統(tǒng)是實(shí)現(xiàn)對(duì)特定過程或設(shè)備的精確控制的系統(tǒng)。它們可以是簡(jiǎn)單的開關(guān)控制,也可以是復(fù)雜的自適應(yīng)控制。開環(huán)控制和
開環(huán)控制和閉環(huán)控制的應(yīng)用場(chǎng)景
開環(huán)控制和閉環(huán)控制是控制系統(tǒng)設(shè)計(jì)中的兩種基本類型。它們?cè)谠S多領(lǐng)域都有廣泛的應(yīng)用,包括工業(yè)自動(dòng)化、機(jī)器人技術(shù)、航空航天、汽車、能源系統(tǒng)等。 引言 控制系統(tǒng)是現(xiàn)代技術(shù)中不可或缺的一部分,它
開環(huán)控制與閉環(huán)控制的區(qū)別是什么?
開環(huán)控制與閉環(huán)控制是兩種不同的控制方法,它們?cè)?b class='flag-5'>控制系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)中有著重要的作用。 1. 開環(huán)控制 開環(huán)
PLC如何完成閉環(huán)控制及邏輯控制
在現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中,可編程邏輯控制器(PLC)以其高可靠性、強(qiáng)大的控制功能和靈活的編程方式,成為了工業(yè)自動(dòng)化系統(tǒng)的核心控制器。PLC不僅能夠完成基本的邏輯控制任務(wù),還能夠?qū)崿F(xiàn)復(fù)雜的





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論