 深度探討UWB技術的工作原理
深度探討UWB技術的工作原理
要知道:超寬帶技術 (UWB) 是最佳定位跟蹤技術,您應該使用這項技術。沒了,感謝閱讀本書。
當然,只是開個玩笑。我們可以說 UWB 是當今最好、最先進的定位技術,但證據呢?要回答這個問題,我們需要透過現象看本質。
本章探討了 UWB 技術的內部工作原理,并概述了 UWB 和窄帶定位方法之間的差異。此外,本章還說明了如何針對不同的應用或用例場景選擇最佳的系統架構。
UWB 與窄帶進行比較
適用于室內和室外定位應用的技術有多種,但 UWB 最精確、最可靠且最具成本效益;通常也更具可擴展性。將 UWB 技術與最流行的窄帶方法進行比較,可以清楚地說明這一點,這也是我們在本節要做的。
一切都取決于帶寬
從一開始,脈沖無線電 UWB 的設計目的就是實現高精度測距估計,同時進行雙向通信。這樣它就可以收集傳感器數據,并控制執行器。
脈沖無線電是 UWB 信號的一種形式,它的特性使其成為密集多徑環境中定位和通信服務的理想選擇。
除了其定位功能,Qorvo UWB 技術還符合 IEEE 802.15.4a 標準和近期發布的 IEEE 802.15.4z 標準。因此,除了厘米級測距精度,開發人員還強調要確保該技術穩定且不受各種干擾的影響,從而實現更高的可靠性。制定該標準時,還考慮了低功耗和低成本因素,以及支持大量互連設備的能力。工程師們在創建該標準時有一個愿景:讓每個互連對象都具有“定位感知”能力。
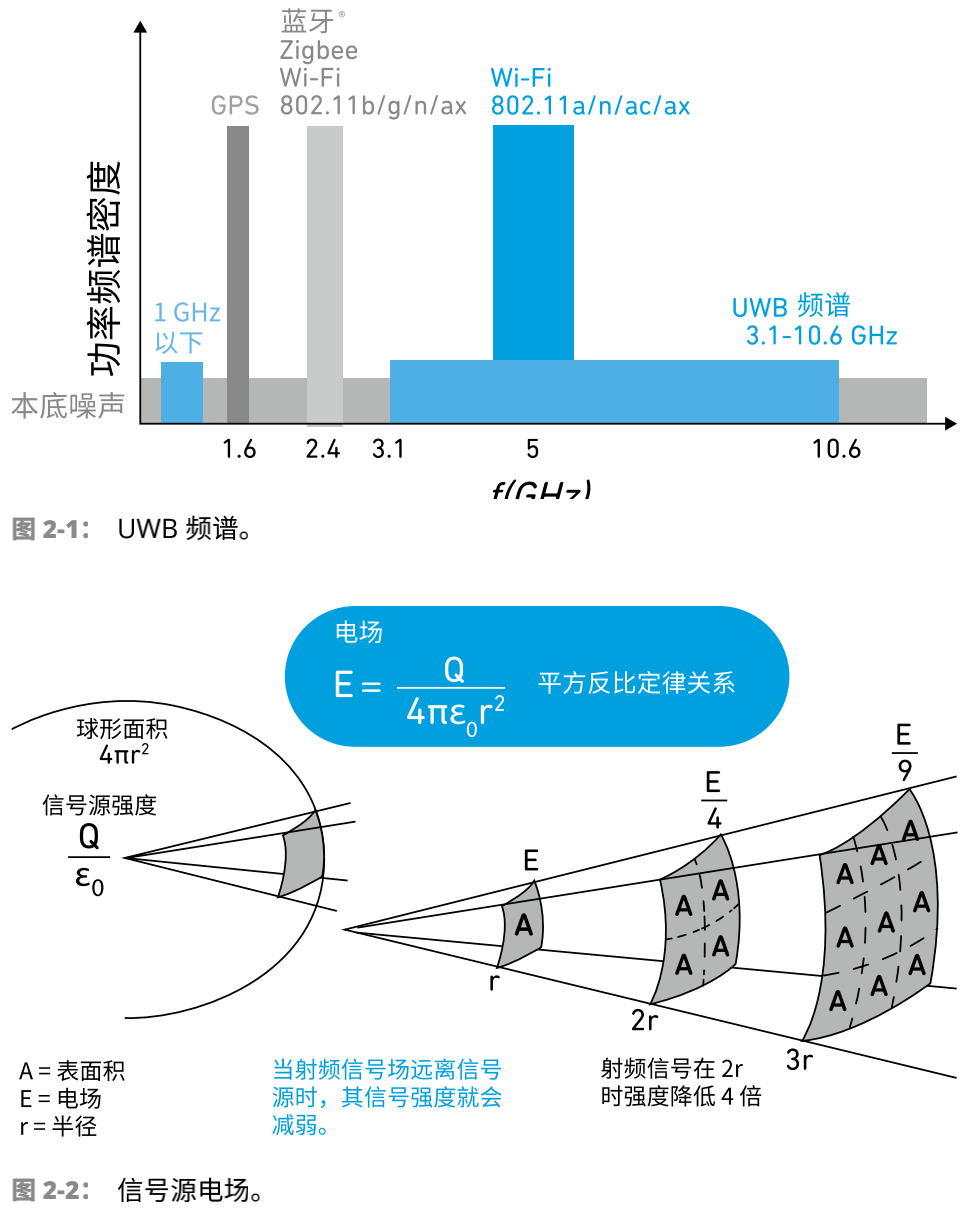
聯邦通信委員會 (FCC) 將 UWB 無線電頻率范圍定義為 3.1 GHz 至 10.6 GHz,最低信號帶寬為 500 MHz(參見圖 2-1)。與其他無線電技術不同,UWB 并不使用幅度或頻率調制來編碼其信號傳輸的信息。相反,UWB 采用非常窄的短脈沖序列,利用二進制相移鍵控 (BPSK) 和/或脈位調制 (BPM) 對數據進行編碼。使用窄脈沖導致傳輸表現出寬帶寬特性,從而可以擴大范圍,降低對窄帶干擾的敏感度,并且能夠在存在多路徑反射的情況下運行。
RSSI 的限制
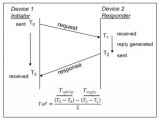
在當今的許多應用中,定位跟蹤采用接收信號強度指示器 (RSSI) 實現。在 RSSI 應用中,無線電信號的強度隨自由空間中與發射機距離的平方反比而變化,如圖 2-2 所示。當信號遠離信號源時,信號強度就會減弱。
將 RSSI 配合 Wi-Fi 和藍牙 802.11 標準一起使用。根據已知的發射端設備的發射功率,就可以預測設備之間的距離。然而,這些類型的測量也存在缺陷,我們接下來會進行討論。
使用藍牙的定位跟蹤
藍牙定位跟蹤,如藍牙低功耗 (BLE) 信標,在某些情況下很有效。信標主要用于接近檢測。它們會在設備(如電話)處于覆蓋范圍內時進行檢測,并通過區分信號強度 (RSSI) 的強弱來估算距離。
這種方法的問題在于,信號強度并不能很好地反映距離。如果信號強度低,是意味著電話離信標很遠,還是意味著信標和電話之間存在一個巨大的柱子?如圖 2-3 所示,每個信標與接收電話之間的視線 (LOS) 有好有壞;每個障礙物都會改變距離測量的整體精度。
設備 A 可以從會議室天花板上的信標接收到非常強的信號,但墻壁使會議室外部附近角落的信標信號明顯減弱,而這兩個信標與設備 A 的距離大致相同。設備 B 不在任何信標的 LOS 范圍內,因此,所有信號都明顯減弱,而設備 C 處于開放式辦公室中多個信標的 LOS 范圍內。所以信號強度更強,因為衰減更少。
解決這個問題的變通方案就是使用一種叫做“指紋識別”的方法。先利用安裝在幾米遠固定位置的信標測量已知位置其他信標的信號強度。將這些信號強度信息保存在指紋識別數據庫中。然后,信標通過比較其信號強度與指紋識別數據庫中的數據,就可以確定設備的距離和位置。根據最接近的匹配即可獲得位置測量結果。
指紋識別有許多版本,它們使用各種各樣復雜的算法。請記住,這些系統只是變通方案。它們并不能以 UWB 等技術的精度真正解決距離測量問題。
使用 Wi-Fi 的定位跟蹤
Wi-Fi 是室內定位應用最常用的無線電信號。它仍然是使用最廣泛的室內定位技術,并且經常與 BLE 結合使用。Wi-Fi 的主要優勢在于,大多數公共或私人場所都提供 Wi-Fi。
然而,使用 Wi-Fi 信號強度估算距離會面臨與藍牙相同的挑戰。一些公司已經開發出替代算法,試圖使用 Wi-Fi 信號的飛行時間 (ToF) 或到達時間 (ToA) 來更精確地測量距離,但這無法直接使用標準的 Wi-Fi 硬件實現。
ToF 是一種通過將信號的 ToF 乘以光速來測量兩個無線電收發器之間距離的方法。ToA 是無線電信號從發射機到達遠程接收機的時間點。
通過在網絡中添加更多信標,可以在一定程度上提高 RSSI 指紋識別的準確性。盡管精度可能會提高一點,但卻無法提高測量的整體可靠性。此外,如果平面圖有任何變化,指紋識別數據庫也需要更新,這可能既耗費成本又耗時。
為什么說 UWB 最適合室內定位跟蹤
UWB 的固有特性意味著,它可以實現比其他技術更精確的室內定位和距離測量。
如圖 2-4 所示,UWB 脈沖(中間和右側圖)只有 2 納秒 (ns) 寬,因此不受反射信號(多路徑)干擾和噪聲的影響。UWB 射頻 (RF) 脈沖邊緣清晰,因此在存在日常環境中常見的信號反射和多路徑效應的情況下仍能精確測定到達時間和距離。
將 UWB 作為解決方案時,反射信號(灰色)不會影響直接信號(藍色)。IR-UWB 信號(中間和右側)的上升和下降時間(邊沿)比標準窄帶信號(左側)更短,因此可以精確地測量信號的到達時間。這也有助于 UWB 信號在存在噪聲和多徑效應的情況下保持其完整性和結構。
即使在噪聲條件下,如圖 2-4(右側)所示,2ns 寬的脈沖無線電 UWB 脈沖的到達時間幾乎未受影響。相比之下,如圖 2-5 所示,窄帶信號受到噪聲的影響比較明顯。
我們已使用窄帶無線電技術對基于 ToF 的方法進行了試驗。窄帶信號對多路徑非常敏感,因為反射信號(深灰色)可與直達經信號(淺灰色)進行具有破壞性的結合,從而在接收機端生成最終信號(藍色)。這會影響信號超越閾值(用于測量 ToA)的時間,從而降低精度。
UWB 的精度優勢非常明顯。UWB 完全能夠以 5 至 10 厘米的精度測量距離和位置。相比之下,藍牙、Wi-Fi 以及其他窄帶無線電標準只能實現米級精度。此外,由于 UWB 無線電脈沖極短,多徑效應下,直達徑信號不會與多徑信號重疊,因此不會損壞信號完整性和強度。
這表明,UWB 具有以下特性
超精準,提供厘米級精度,比 BLE 和 Wi-Fi 精確 100 倍
超可靠,在存在多徑反射的情況下能夠保持信號完整性
實時,延遲比全球定位系統 (GPS) 低 50 倍,比標準信標低 3,000 倍
UWB 系統考慮因素回顧
在本節中,我們來簡要介紹一下 UWB 的系統組件,以及硬件和軟件選擇如何影響系統的性能。
錨點和標簽
要了解 UWB 系統,您需要理解錨點和標簽這兩個術語。錨點通常就是固定的 UWB 設備。標簽通常是指移動的 UWB 設備。錨點和標簽可交換信息,以便確定兩者之間的距離。標簽的確切位置可通過與多個錨點通信來確定。
一些設備即可作為錨點,也可作為標簽。例如,當兩個移動手機使用 UWB 來計算相互之間的距離時,它們可以在計算過程中轉化角色,交替地用作標簽和錨點。
存儲單元和處理能力
典型的 UWB 設備需要具備一定程度處理能力和特定功能。對于簡單的標簽,要求處理器具有少量的閃存(可編程非易失性存儲器)和數據存儲器(易失性隨機存取存儲器,或 RAM)。對于錨點應用,比如到達時間差 (TDoA) 中使用的錨點,可能需要具有更多閃存和 RAM 的處理器,在許多情況下還需要數據回傳。
圖 2-7 顯示了標簽(具有運動檢測)或錨點(具有回傳接口,如以太網或 Wi-Fi 接口)的常見架構。對于錨點,可能需要不同類型的處理器,具體取決于系統規模和工作負載/吞吐量需求。
另一個系統考慮因素就是天線。不同的應用會需要不同的天線。例如,標簽通常使用小型全向性天線。錨點則可能要使用定向天線,具體取決于拓撲結構。
軟件棧
UWB 通信組件和應用之間的重要互連就是 UWB 軟件棧,如圖 2-8 所示。軟件棧有助于協調與外部設備的互操作性和共存。此外,軟件可實現 UWB 通信組件和內部微控制器之間的通信。例如,在控制智能手機和汽車之間的連接時,軟件負責協調通信。
軟件還可以同時管理多個應用和用例。例如,某個解決方案可能是控制揚聲器、照明裝置、加熱系統等智能家居生態系統的組成部分。它可以與所有 UWB 標簽和 UWB 支持設備通信,同時利用位置信息控制環境、鎖門和開門、啟用和禁用報警系統等。UWB 軟件棧可同時處理所有這些不同的情況。
使用 UWB 軟件棧可確保 UWB 通信組件滿足不同應用的需求。此外,從最終用戶和整體系統設計角度來說,利用該軟件的許多功能可以讓事情變得更簡單。
功能優先級排序
在一些應用場景下,不同功能需要進行優先級排序。例如,假設在某個應用中,電源管理和電池使用壽命很重要,比位置更新速率或數據吞吐量更重要。在這種情況下,可使用軟件優化功耗,將設備設置為不用時關閉,需要通信時開啟。
另一種情況就是,傳感器 LOS 信號不理想或是來自不同的方向。此時,可使用軟件將結果平均,以獲得精確的距離信息;軟件還可以平滑處理比其他信號更嘈雜的信號。為了獲得更精確的結果(尤其是在快速移動應用中),或為了添加有關設備方向的信息,軟件還可以將來自 UWB 芯片組的數據與來自慣性測量裝置(包括加速計、陀螺儀和磁力計等)的數據整合在一起。
UWB 拓撲結構比較和選擇
UWB 利用 ToF 的概念,這是一種通過將信號的 ToF 乘以光速來測量兩個無線電收發器之間距離的方法。基于這個基本原理,可根據目標應用的需求以不同的方式實現 UWB 定位技術。
最佳拓撲結構主要由應用決定。這也就是說,設計工程師首先要將應用和拓撲結構匹配。可供選擇的方法有:
雙向測距 (TWR):如圖 2-9 所示,TWR 方法可通過測定 UWB 射頻信號的 ToF,然后將該時間乘以光速來計算標簽與錨點之間的距離。汽車無鑰門禁系統就是使用 TWR 方法的一個應用示例 TWR 可生成一個安全空間,類似于一個安全氣泡,同時確保在應用的時候,這個氣泡保持高精度的安全控制。
如果您在兩個設備之間實施 TWR 方案,則可以獲得設備之間的距離信息。在 TWR 方案的基礎上,您還可以在移動標簽和固定錨點之間實現 2D 甚至 3D 位置測量;稱為“三邊測量法”。
采用 TWR 方法,可交換三條消息。標簽通過發送一條含已知錨點地址的輪詢消息啟動 TWR。錨點記錄輪詢接收時間,并回復響應消息。在收到響應消息后,標簽記錄時間并編寫最后一條消息。錨點可利用最后一條消息中的信息確定 UWB 信號的 ToF。
TWR 方法也可用于 2D/3D 資產場景。顯示使用監聽器的雙向測距,顯示使用數據標簽回程的 TWR。數據回傳可以使用多種方法(如 Wi-Fi、NB-IoT、LTE-M 等)實現,通過這些方法將數據傳輸至云。
到達時間差 (TDoA) 和反向 TDoA:TDoA 和反向 TDoA 方法類似于 GPS。在已知的固定場所部署了多個參考點,稱為“錨點”,且這些錨點在時間方面實現了緊密同步。如果為 TDoA,移動設備將閃爍(也就是定期發送信息),當錨點接收到信標信號時,將基于共同的同步時基標記時間戳。
然后,多個錨點的時間戳將轉發至中央定位引擎,中央定位引擎將根據每個錨點的信標信號 TDoA 運行多點定位算法。最后將得到移動設備的 2D 或 3D 位置。反向 TDoA 更像 GPS。在該系統中,錨點發送同步信標(具有固定/已知偏移,以避免發生碰撞),移動設備利用 TDoA 和多點定位算法來計算其位置,如圖 2-13 所示。
到達相位差 (PDoA):另一個 UWB 拓撲就是 PDoA。PDoA 可將兩個設備之間的距離與兩者之間的方位測量結合在一起,如圖 2-14 所示。利用距離和方位的組合信息,可在沒有任何其他基礎設施的情況下計算出兩個設備的相對位置。
為此,其中一個設備必須配備至少 2 根天線,并且能夠測量每根天線處到達信號載波的相位差。相位完全不受天線變形的影響,并且可實現優于 10°的測量精度,從而可以在不到 5°的情況下確定發射器的方位。
對于每種拓撲結構,分別最適合哪種應用?這些用例主要側重于三個不同的領域:感應式門禁、定位服務和設備對設備(點對點)應用。圖 2-15 詳細介紹了 TWR、TDoA、反向 TDoA 和 PDoA 拓撲結構的最佳應用。
編輯:jq
-
藍牙
+關注
關注
114文章
5811瀏覽量
170195 -
定位技術
+關注
關注
7文章
288瀏覽量
25350 -
UWB
+關注
關注
32文章
1100瀏覽量
61150 -
RSSI
+關注
關注
2文章
95瀏覽量
27743
原文標題:UWB技術的工作原理探討
文章出處:【微信號:Qorvo_Inc,微信公眾號:Qorvo半導體】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
UWB脈沖多普勒雷達的工作原理和應用

未來UWB標簽技術發展趨勢
如何選擇合適的UWB模塊
UWB模塊工作原理 UWB模塊應用案例
BLE、UWB和RFID,“定位技術”哪家強?

一文讀懂RFID技術的工作原理及技術參數
超寬帶技術uwb的帶寬頻率是多少
uwb超寬帶技術有什么用
煤礦人員定位系統——基于UWB技術帶電子圍欄功能
全跡科技UWB雷達及其汽車應用

數字示波器的工作原理和技術特點
UWB技術的內部工作原理和窄帶定位方法之間的差異概述





 工商網監
工商網監
評論