

CAN節(jié)點的穩(wěn)定性、可靠性和安全性得益于其強大的錯誤管理機制。那么,CAN節(jié)點為什么能感知錯誤?又是如何響應(yīng)錯誤?您是否能清晰地想象出這一過程?本文將為大家詳細分析CAN節(jié)點錯誤管理的工作過程。
節(jié)點電路構(gòu)成
如圖1所示,MCU作為主控制器,完成CAN控制器和功能電路的控制。
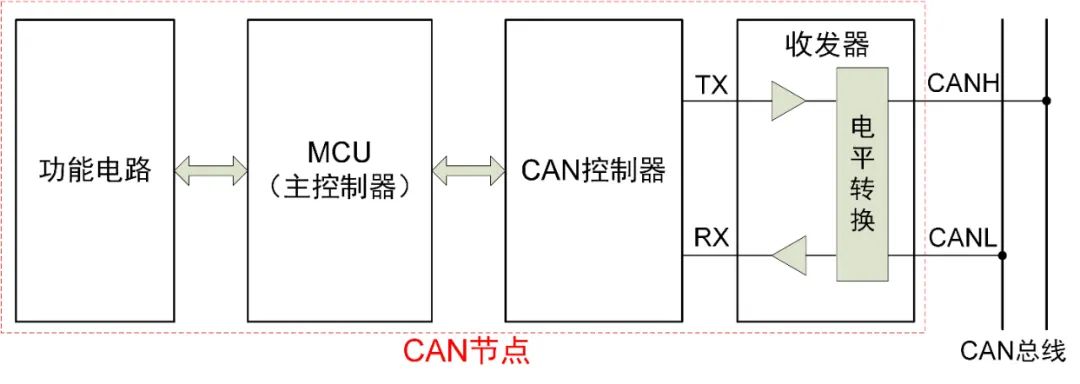
圖1 CAN節(jié)點組成框圖
CAN控制器是工作于數(shù)據(jù)鏈路層的器件,集成了CAN規(guī)范中數(shù)據(jù)鏈路層的全部功能,其功能由軟件和硬件共同實現(xiàn),從設(shè)備供應(yīng)商買回來的CAN控制器已經(jīng)把相應(yīng)的邏輯固化在其硅片之中;
MCU是工作于應(yīng)用層的器件,其功能由軟件和硬件共同實現(xiàn),MCU運行的程序可由設(shè)計者靈活設(shè)計,以實現(xiàn)CAN節(jié)點的特定功能;
CAN收發(fā)器工作于物理層,其功能完全由硬件實現(xiàn),其作用是將CAN控制器的邏輯電平轉(zhuǎn)化為CAN總線的模擬差分信號,以及把總線模擬差分信號轉(zhuǎn)換成CAN控制器的邏輯電平。
CAN節(jié)點的錯誤管理屬于CAN通信規(guī)范數(shù)據(jù)鏈路層的內(nèi)容,具體來說,錯誤管理是通過MCU和CAN控制器來實施的。可以說,CAN控制器是錯誤管理的基礎(chǔ)設(shè)施,我們可以從兩個方面理解其工作邏輯:一是如何感知錯誤,二是如何響應(yīng)錯誤。
注:
1、本文所說的CAN規(guī)范指的是德國BOSCH公司的《CAN Specification Version 2.0》。
節(jié)點如何感知錯誤?
如前文所述,節(jié)點對總線錯誤的識別是通過CAN控制器來完成的。CAN控制器輸出給收發(fā)器發(fā)送引腳TX的邏輯信號位會從收發(fā)器接收引腳RX接收,這使得CAN控制器可以在發(fā)送一個邏輯位期間同時監(jiān)測總線的實際電平值。CAN控制器檢測總線錯誤原理如圖2所示:
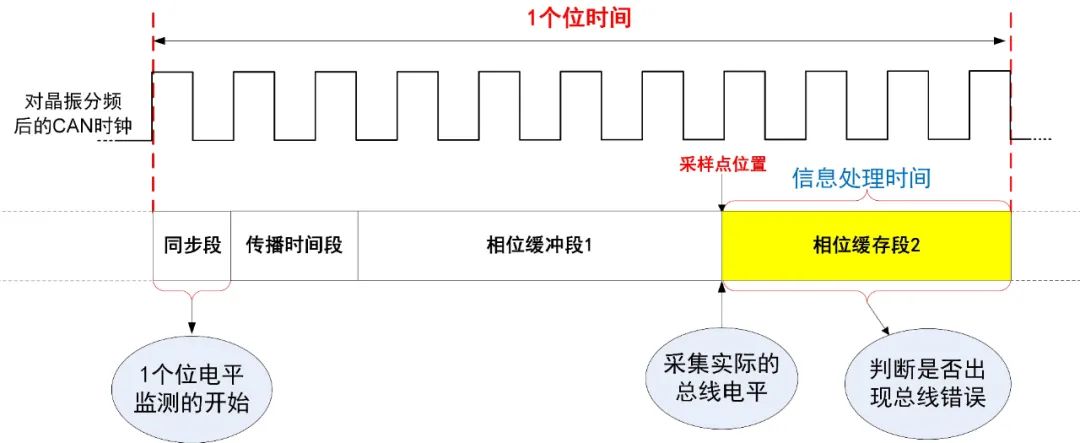
圖2 監(jiān)測總線錯誤原理圖
如圖2描述,CAN控制器監(jiān)測一個總線電平的電平值是在采樣點位置進行的,判斷是否出現(xiàn)錯誤是在信息處理時間內(nèi)完成的。
綜上所述,CAN控制器對錯誤的識別可概括為:無論是作為發(fā)送器還是接收器,在采樣點位置成功監(jiān)測到當(dāng)前總線的實際電平值后,CAN控制器便按照CAN規(guī)范中描述的錯誤管理規(guī)則判斷是否出現(xiàn)錯誤。
CAN通信過程中的錯誤類型包括5種,分別是:位錯誤、填充錯誤、CRC錯誤、幀格式錯誤、應(yīng)答錯誤。接下來分別對5種錯誤的檢測識別過程進行解析。
1、位錯誤
位錯誤是由作為發(fā)送器的節(jié)點在發(fā)送報文期間進行檢測識別的。CAN控制器的程序邏輯發(fā)送的電平與監(jiān)測到總線的實際信號不一致即在此位期間檢測到位錯誤。
例外情況,在仲裁場或應(yīng)答間隙期間發(fā)送一“隱性”位卻監(jiān)視到一“顯性”位,以及當(dāng)發(fā)送器發(fā)送一個被動錯誤標(biāo)志但檢測到“顯性”位時,均也不被視為位錯誤,以實現(xiàn)特定的功能。
2、填充錯誤
在CAN幀的位場中,幀起始、仲裁場、控制場、數(shù)據(jù)場以及CRC序列,均通過位填充的方法編碼。無論何時,發(fā)送器只要檢測到這些位場對應(yīng)位流里有5個連續(xù)相同值的位,便自動在接著的下一位插入一個補碼位。CAN控制器在監(jiān)測總線電平值的同時對連續(xù)相同的位電平值會進行計數(shù),如果在使用位填充法進行編碼的信息中,出現(xiàn)了第6個連續(xù)相同的位電平值時,便檢測到一個填充錯誤。
3、CRC錯誤
CRC錯誤是由作為接收器的節(jié)點進行檢測識別的。CRC序列共15位(不包含填充位),其內(nèi)容由幀起始、仲裁場、控制場、數(shù)據(jù)場(如果有)的無填充位流計算而來。
CRC序列計算使用CAN規(guī)范規(guī)定的方法。作為發(fā)送器的節(jié)點發(fā)送CAN報文時CRC序列由規(guī)定的計算方法確定,作為接收器的節(jié)點從總線上接收完數(shù)據(jù)場最后一個數(shù)據(jù)位(沒有數(shù)據(jù)場時是接收完控制場的最后一個位)后,如果接下來接收到實際的CRC序列與接收器的計算結(jié)果不一致,便檢測到CRC錯誤。
4、格式錯誤
節(jié)點無論是作為發(fā)送器的還是作為接收器均可在監(jiān)測報文期間檢測識別格式錯誤。由于CAN通信嚴(yán)格按照CAN規(guī)范定義的幀格式進行報文封裝傳輸,CAN控制器在監(jiān)測總線電平位時明確知道當(dāng)前位、后續(xù)位屬于幀格式中哪個位場,以及屬于位場的第幾個位,當(dāng)接收到一個屬于幀格式固定形式的位時,如果實際電平值與幀格式定義不一致,則檢測到一個格式錯誤。
例外情況,對于接收器來說,幀結(jié)束最后的位被置于“不重要”狀態(tài),監(jiān)測到的幀結(jié)束最后一位期間的顯性位不被當(dāng)作幀錯誤。
5、應(yīng)答錯誤應(yīng)答錯誤是由作為發(fā)送器的節(jié)點檢測識別的。在發(fā)送報文時,只要在發(fā)送應(yīng)答間隙(隱性)期間所監(jiān)測到的位不為“顯性”,則發(fā)送器會檢測到一個應(yīng)答錯誤。
注:
1、上述5種錯誤不會相互排斥,也就是說CAN幀中的某個錯誤有可能同屬一種以上的錯誤類型。
2、如上所述,作為發(fā)送器或接收器的不同角色時,直接能檢測到的錯誤類型是不一樣的。
節(jié)點如何響應(yīng)錯誤?
CAN規(guī)范中規(guī)定每個CAN控制器中實現(xiàn)一個發(fā)送錯誤計數(shù)器和一個接收錯誤計數(shù)器。根據(jù)計數(shù)值不同,節(jié)點會處于不同的節(jié)點狀態(tài),并根據(jù)計數(shù)值的變化進行狀態(tài)轉(zhuǎn)換,狀態(tài)轉(zhuǎn)換如圖3所示。
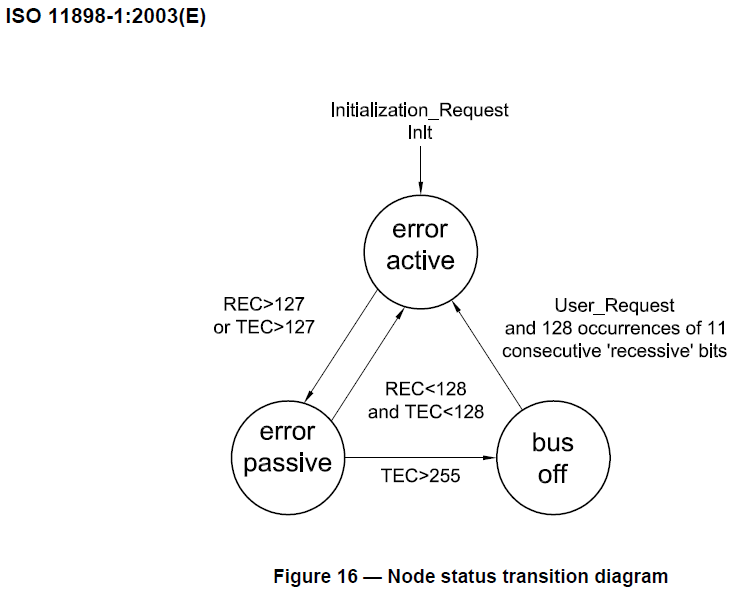
圖3 節(jié)點轉(zhuǎn)態(tài)轉(zhuǎn)換圖
當(dāng)CAN控制器檢測到總線錯誤后通過發(fā)送錯誤標(biāo)志指示錯誤。對于“錯誤主動”的節(jié)點,錯誤標(biāo)志表現(xiàn)為“主動錯誤標(biāo)志”,對于“錯誤被動”的節(jié)點,錯誤標(biāo)志表現(xiàn)為“被動錯誤標(biāo)志”。
無論檢測到位錯誤、填充錯誤、幀格式錯誤、還是應(yīng)答錯誤,CAN控制器會在緊鄰的下一位發(fā)送錯誤標(biāo)志。如果檢測到的錯誤類型是CRC錯誤,錯誤標(biāo)志的發(fā)送開始于ACK定界符之后的位,即幀結(jié)尾。
綜上所述,CAN控制器對錯誤的響應(yīng)可概括為:根據(jù)當(dāng)前的節(jié)點狀態(tài)在位流序列相應(yīng)的位置用錯誤標(biāo)志標(biāo)示錯誤,并按照CAN規(guī)范更新錯誤計數(shù)值,進行節(jié)點狀態(tài)轉(zhuǎn)換。并且是每成功監(jiān)測到一次錯誤便進行一次響應(yīng)。
注:
1、由于篇幅有限,關(guān)于錯誤計數(shù)的詳細規(guī)則、節(jié)點狀態(tài)轉(zhuǎn)換以及錯誤幀格式等細節(jié)均不在本文進行討論,請讀者查閱CAN協(xié)議規(guī)范。
2、上述分析可知道,錯誤響應(yīng)的關(guān)鍵要素包括錯誤標(biāo)志的類型和響應(yīng)的位置。
錯誤管理機制的作用
錯誤管理機制的作用主要體現(xiàn)在對錯誤的響應(yīng)過程。
作為發(fā)送器發(fā)送錯誤標(biāo)志時,無論“主動錯誤”還是“被動錯誤”都必然包括6個連續(xù)同極性的位,使其他節(jié)點也識別到總線錯誤,進而使所有節(jié)點都能丟棄當(dāng)前出錯的幀。
作為接收器發(fā)送錯誤標(biāo)志時,“主動錯誤”標(biāo)志使其他節(jié)點也識別到總線錯誤從而使所有節(jié)點(包括作為發(fā)送器的節(jié)點)都能丟棄當(dāng)前出錯的幀;“被動錯誤”標(biāo)志不影響總線通信從而使其他節(jié)點都能成功接收當(dāng)前幀,處于“被動錯誤”狀態(tài)的節(jié)點屬于“不可信”狀態(tài),其檢測到錯誤僅是自己丟棄當(dāng)前幀,這也是錯誤管理的靈活性所在,即錯誤響應(yīng)并不是嚴(yán)格在任何情況下都使所有節(jié)點丟棄同一幀報文。
綜上所述,錯誤管理機制可以使所有的節(jié)點同時接收或丟棄總線的同一幀報文,又可以使作為接收器的被動錯誤狀態(tài)的節(jié)點僅自己丟棄當(dāng)前報文而不影響其他節(jié)點。因此,錯誤管理是實現(xiàn)CAN通信數(shù)據(jù)一致性的機制之一。
總結(jié)
CAN節(jié)點錯誤管理功能是由CAN節(jié)點組成中的CAN控制器負(fù)責(zé)的,對錯誤管理的工作過程可以從“錯誤識別”和“錯誤響應(yīng)”兩個方面進行理解。錯誤管理是實現(xiàn)CAN通信數(shù)據(jù)的一致性的機制之一。
ZPS-CANFD是致遠電子總線分析儀第二代CAN總線開發(fā)輔助工具,適用于CANFD、CAN、LIN總線的測量及測試儀器,支持總線數(shù)據(jù)的發(fā)送和接收,高層協(xié)議解析及診斷,能對CANFD、CAN總線物理層電氣信號實時采集和記錄,并附帶有高速模擬通道、通用數(shù)字IO及模擬IO,通過提供的硬件接口及軟件功能,用戶能夠便捷地構(gòu)建總線信號測量與分析、節(jié)點功能仿真及測試、網(wǎng)絡(luò)可靠性診斷及評估的自動化系統(tǒng)。ZPS-CANFD可實現(xiàn)CAN/CANFD報文和波形的同步監(jiān)測,可以直觀的定位排查節(jié)點錯誤問題,以及更高效的錯誤干擾等模擬測試。
編輯:jq
-
mcu
+關(guān)注
關(guān)注
146文章
17877瀏覽量
361355 -
計數(shù)器
+關(guān)注
關(guān)注
32文章
2288瀏覽量
96100 -
發(fā)送器
+關(guān)注
關(guān)注
1文章
261瀏覽量
27175 -
CAN控制器
+關(guān)注
關(guān)注
3文章
75瀏覽量
15260
原文標(biāo)題:【原理解析】一文讀懂CAN節(jié)點錯誤管理機制
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
如何驗證CAN控制器的錯誤響應(yīng)機制?

T113核心板CAN通訊bus-off自動恢復(fù)

CAN節(jié)點錯誤管理機制工作原理解析
深入探討試驗機數(shù)據(jù)采集系統(tǒng)在力學(xué)試驗室中發(fā)揮的作用
CAN總線十萬個為什么 | 做好這幾點,總線通訊不再異常
深入探討DeepSeek大模型的核心技術(shù)

基于Vector工具進行CAN協(xié)議錯誤幀的分析實踐

CAN通信節(jié)點多時,如何減少寄生電容和保障節(jié)點數(shù)量?
深入探討Linux系統(tǒng)中的動態(tài)鏈接庫機制

CAN總線十萬個為什么 | 為什么CAN總線分支不能過長?
得瑞領(lǐng)新亮相IDC中國年度峰會,深入探討NVMe SSD助力金融行業(yè)數(shù)字化轉(zhuǎn)型

CAN總線錯誤狀態(tài)的種類
【CAN總線知識】為什么CAN節(jié)點ID不能相同?
深入探討Linux的進程調(diào)度器

康謀分享 | ADTF在CAN方面技術(shù)的深入探討






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論