

網(wǎng)上關于標準庫、HAL庫的描述相信是數(shù)不勝數(shù)。可是一個對于很多剛入門的朋友還是沒法很直觀的去真正了解這些不同開發(fā)發(fā)方式彼此之間的區(qū)別,所以筆者想以一種非常直白的方式,用自己的理解去將這些東西表述出來,如果有描述的不對的地方或者是不同意見的也可以大家提出。
一、配置寄存器不少先學了51的朋友可能會知道,會有一小部分人或是教程是通過匯編語言直接操作寄存器實現(xiàn)功能的,這種方法到了STM32就變得不太容易行得通了。
因為STM32的寄存器數(shù)量是51單片機的十數(shù)倍,如此多的寄存器根本無法全部記憶,開發(fā)時需要經(jīng)常的翻查芯片的數(shù)據(jù)手冊,此時直接操作寄存器就變得非常的費力了。但還是會有很小一部分人,喜歡去直接操作寄存器,因為這樣更接近原理,知其然也知其所以然。
二、標準庫上面也提到了,STM32有非常多的寄存器,而導致了開發(fā)困難,所以為此ST公司就為每款芯片都編寫了一份庫文件,也就是工程文件里stm32F1xx.。。.。之類的。在這些.c .h文件中,包括一些常用量的宏定義,把一些外設也通過結構體變量封裝起來,如GPIO口時鐘等。
所以我們只需要配置結構體變量成員就可以修改外設的配置寄存器,從而選擇不同的功能。也是目前最多人使用的方式,也是學習STM32接觸最多的一種開發(fā)方式,我也就不多闡述了。
三、HAL庫HAL庫是ST公司目前主力推的開發(fā)方式,全稱就是Hardware Abstraction Layer(抽象印象層)。
庫如其名,很抽象,一眼看上去不太容易知道他的作用是什么。它的出現(xiàn)比標準庫要晚,但其實和標準庫一樣,都是為了節(jié)省程序開發(fā)的時期,而且HAL庫尤其的有效,如果說標準庫把實現(xiàn)功能需要配置的寄存器集成了,那么HAL庫的一些函數(shù)甚至可以做到某些特定功能的集成。
也就是說,同樣的功能,標準庫可能要用幾句話,HAL庫只需用一句話就夠了。并且HAL庫也很好的解決了程序移植的問題,不同型號的stm32芯片它的標準庫是不一樣的,例如在F4上開發(fā)的程序移植到F3上是不能通用的,而使用HAL庫,只要使用的是相通的外設,程序基本可以完全復制粘貼,注意是相通外設,意思也就是不能無中生有。
例如F7比F3要多幾個定時器,不能明明沒有這個定時器卻非要配置,但其實這種情況不多,絕大多數(shù)都可以直接復制粘貼。是而且使用ST公司研發(fā)的STMcube軟件,可以通過圖形化的配置功能,直接生成整個使用HAL庫的工程文件,可以說是方便至極,但是方便的同時也造成了它執(zhí)行效率的低下,在各種論壇帖子真的是被吐槽的數(shù)不勝數(shù)。
四、總結綜合上面說的,其實筆者還是強烈推薦HAL庫的,理由有二:
第一、 F7系列開始 ST公司就已近開始停止更新標準庫,也就是F7開始包括F7已經(jīng)不能用標準庫了,公司對于主打HAL庫的目的已經(jīng)非常明顯了。
二、追求更方便、追求模塊化向來是世界的潮流,更方便的HAL庫一定會迅速發(fā)展,低效的短板遲早會被硬件高度集成化所彌補。
當然啦,不能只學習HAL庫,底層的原理必需是要懂的,這是每個學有所成的人都公認的事實,HAL庫也不是萬能的,結合對底層的理解相信一定會讓你的開發(fā)水準大大提高。
五、STM32 HAL庫與標準庫的區(qū)別1.句柄在STM32的標準庫中,假設我們要初始化一個外設(這里以USART為例) 我們首先要初始化他們的各個寄存器。
在標準庫中,這些操作都是利用固件庫結構體變量+固件庫Init函數(shù)實現(xiàn)的:
USART_InitTypeDefUSART_InitStructure;
USART_InitStructure.USART_BaudRate=bound;//串口波特率
USART_InitStructure.USART_WordLength=USART_WordLength_8b;//字長為8位數(shù)據(jù)格式
USART_InitStructure.USART_StopBits=USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity=USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//無硬件數(shù)據(jù)流控制
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;//收發(fā)模式
USART_Init(USART3,&USART_InitStructure);//初始化串口1
可以看到,要初始化一個串口,需要對六個位置進行賦值,然后引用Init函數(shù),并且USART_InitStructure并不是一個全局結構體變量,而是只在函數(shù)內部的局部變量,初始化完成之后,USART_InitStructure就失去了作用。
而在HAL庫中,同樣是USART初始化結構體變量,我們要定義為全局變量。
UART_HandleTypeDefUART1_Handler;
右鍵查看結構體成員:
typedefstruct
{
USART_TypeDef*Instance;/*!
UART_InitTypeDefInit;/*!
uint8_t*pTxBuffPtr;/*!
uint16_tTxXferSize;/*!
uint16_tTxXferCount;/*!
uint8_t*pRxBuffPtr;/*!
uint16_tRxXferSize;/*!
uint16_tRxXferCount;/*!
DMA_HandleTypeDef*hdmatx;/*!
DMA_HandleTypeDef*hdmarx;/*!
HAL_LockTypeDefLock;/*!
__IOHAL_UART_StateTypeDefState;/*!
__IOuint32_tErrorCode;/*!
}UART_HandleTypeDef;
我們發(fā)現(xiàn),與標準庫不同的是,該成員不僅包含了之前標準庫就有的六個成員(波特率,數(shù)據(jù)格式等),還包含過采樣、(發(fā)送或接收的)數(shù)據(jù)緩存、數(shù)據(jù)指針、串口 DMA 相關的變量、各種標志位等等要在整個項目流程中都要設置的各個成員。
該UART1_Handler就被稱為串口的句柄 它被貫穿整個USART收發(fā)的流程,比如開啟中斷:
HAL_UART_Receive_IT(&UART1_Handler,(u8*)aRxBuffer,RXBUFFERSIZE);
比如后面要講到的MSP與Callback回調函數(shù):
voidHAL_UART_MspInit(UART_HandleTypeDef*huart);
voidHAL_UART_RxCpltCallback(UART_HandleTypeDef*huart);
在這些函數(shù)中,只需要調用初始化時定義的句柄UART1_Handler就好。
2.MSP函數(shù)
MSP是指和MCU相關的初始化,引用一下正點原子的解釋,個人覺得說的很明白:
“我們要初始化一個串口,首先要設置和 MCU 無關的東西,例如波特率,奇偶校驗,停止位等,這些參數(shù)設置和 MCU 沒有任何關系,可以使用 STM32F1,也可以是
”STM32F2/F3/F4/F7上的串口。而一個串口設備它需要一個 MCU 來承載,例如用 STM32F4 來做承載,PA9 做為發(fā)送,PA10 做為接收,MSP 就是要初始化 STM32F4 的 PA9,PA10,配置這兩個引腳。所以 HAL驅動方式的初始化流程就是:HAL_USART_Init()—>HAL_USART_MspInit(),先初始化與 MCU無關的串口協(xié)議,再初始化與 MCU 相關的串口引腳。在 STM32 的 HAL 驅動中HAL_PPP_MspInit()作為回調,被HAL_PPP_Init()函數(shù)所調用。當我們需要移植程序到 STM32F1平臺的時候,我們只需要修改 HAL_PPP_MspInit 函數(shù)內容而不需要修改 HAL_PPP_Init 入口參數(shù)內容。
在HAL庫中,幾乎每初始化一個外設就需要設置該外設與單片機之間的聯(lián)系,比如IO口,是否復用等等,可見,HAL庫相對于標準庫多了MSP函數(shù)之后,移植性非常強,但與此同時卻增加了代碼量和代碼的嵌套層級。可以說各有利弊。
同樣,MSP函數(shù)又可以配合句柄,達到非常強的移植性:
voidHAL_UART_MspInit(UART_HandleTypeDef*huart);
3.Callback函數(shù)
類似于MSP函數(shù),個人認為Callback函數(shù)主要幫助用戶應用層的代碼編寫。還是以USART為例,在標準庫中,串口中斷了以后,我們要先在中斷中判斷是否是接收中斷,然后讀出數(shù)據(jù),順便清除中斷標志位,然后再是對數(shù)據(jù)的處理,這樣如果我們在一個中斷函數(shù)中寫這么多代碼,就會顯得很混亂:
voidUSART3_IRQHandler(void)//串口1中斷服務程序
{
u8Res;
if(USART_GetITStatus(USART3,USART_IT_RXNE)!=RESET)//接收中斷(接收到的數(shù)據(jù)必須是0x0d0x0a結尾)
{
Res=USART_ReceiveData(USART3);//讀取接收到的數(shù)據(jù)
/*數(shù)據(jù)處理區(qū)*/
}
}
而在HAL庫中,進入串口中斷后,直接由HAL庫中斷函數(shù)進行托管:
voidUSART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&UART1_Handler);//調用HAL庫中斷處理公用函數(shù)
/***************省略無關代碼****************/
}
HAL_UART_IRQHandler這個函數(shù)完成了判斷是哪個中斷(接收?發(fā)送?或者其他?),然后讀出數(shù)據(jù),保存至緩存區(qū),順便清除中斷標志位等等操作。比如我提前設置了,串口每接收五個字節(jié),我就要對這五個字節(jié)進行處理。在一開始我定義了一個串口接收緩存區(qū):
/*HAL庫使用的串口接收緩沖,處理邏輯由HAL庫控制,接收完這個數(shù)組就會調用HAL_UART_RxCpltCallback進行處理這個數(shù)組*/
/*RXBUFFERSIZE=5*/
u8aRxBuffer[RXBUFFERSIZE];
在初始化中,我在句柄里設置好了緩存區(qū)的地址,緩存大小(五個字節(jié))
/*該代碼在HAL_UART_Receive_IT函數(shù)中,初始化時會引用*/
huart->pRxBuffPtr=pData;//aRxBuffer
huart->RxXferSize=Size;//RXBUFFERSIZE
huart->RxXferCount=Size;//RXBUFFERSIZE
則在接收數(shù)據(jù)中,每接收完五個字節(jié),HAL_UART_IRQHandler才會執(zhí)行一次Callback函數(shù):
voidHAL_UART_RxCpltCallback(UART_HandleTypeDef*huart);
在這個Callback回調函數(shù)中,我們只需要對這接收到的五個字節(jié)(保存在aRxBuffer[]中)進行處理就好了,完全不用再去手動清除標志位等操作。
所以說Callback函數(shù)是一個應用層代碼的函數(shù),我們在一開始只設置句柄里面的各個參數(shù),然后就等著HAL庫把自己安排好的代碼送到手中就可以了~
綜上,就是HAL庫的三個與標準庫不同的地方之個人見解。
個人覺得從這三個小點就可以看出HAL庫的可移植性之強大,并且用戶可以完全不去理會底層各個寄存器的操作,代碼也更有邏輯性。但與此帶來的是復雜的代碼量,極慢的編譯速度,略微低下的效率。看怎么取舍了。
五、HAL庫結構
說到STM32 的HAL庫,就不得不提STM32CubeMX,其作為一個可視化的配置工具,對于開發(fā)者來說,確實大大節(jié)省了開發(fā)時間。
STM32CubeMX 就是以 HAL 庫為基礎的,且目前僅支持 HAL 庫及 LL 庫!首先看一下,官方給出的 HAL 庫的包含結構:
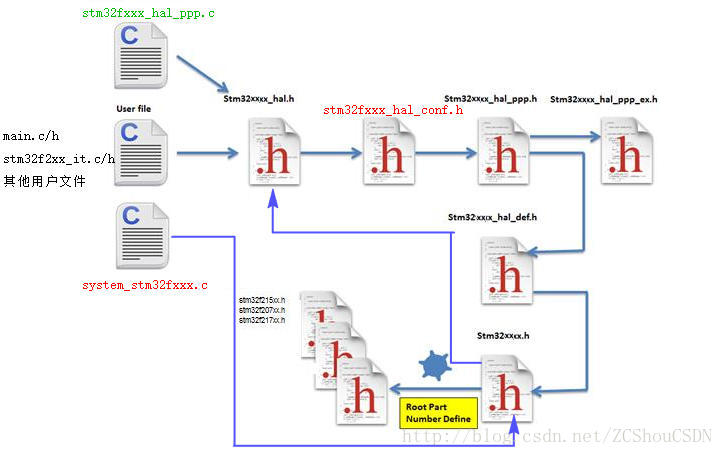
stm32f2xx.h 主要包含STM32同系列芯片的不同具體型號的定義,是否使用HAL庫等的定義,接著,其會根據(jù)定義的芯片信號包含具體的芯片型號的頭文件:
#ifdefined(STM32F205xx)
#include"stm32f205xx.h"
#elifdefined(STM32F215xx)
#include"stm32f215xx.h"
#elifdefined(STM32F207xx)
#include"stm32f207xx.h"
#elifdefined(STM32F217xx)
#include"stm32f217xx.h"
#else
#error"PleaseselectfirstthetargetSTM32F2xxdeviceusedinyourapplication(instm32f2xx.hfile)"
#endif
緊接著,其會包含 stm32f2xx_hal.h。
-
stm32f2xx_hal.h:stm32f2xx_hal.c/h 主要實現(xiàn)HAL庫的初始化、系統(tǒng)滴答相關函數(shù)、及CPU的調試模式配置
-
stm32f2xx_hal_conf.h :該文件是一個用戶級別的配置文件,用來實現(xiàn)對HAL庫的裁剪,其位于用戶文件目錄,不要放在庫目錄中。
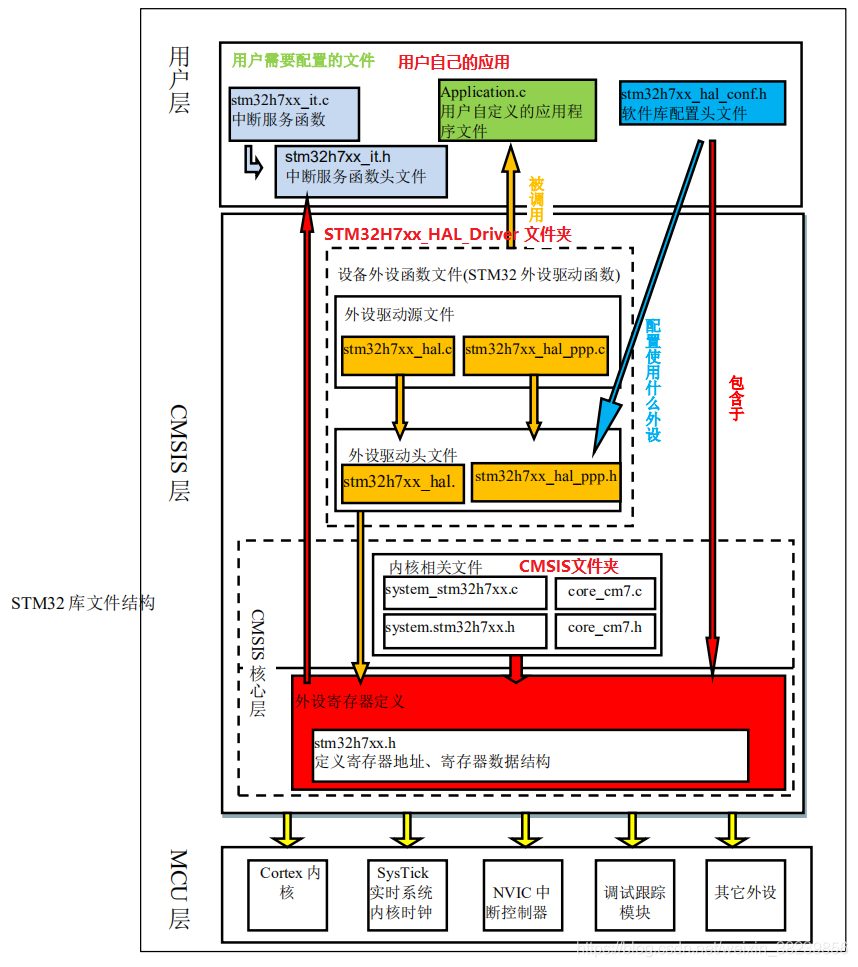
接下來對于HAL庫的源碼文件進行一下說明,HAL庫文件名均以stm32f2xx_hal開頭,后面加上_外設或者模塊名(如:stm32f2xx_hal_adc.c):
庫文件:
stm32f2xx_hal_ppp.c/.h//主要的外設或者模塊的驅動源文件,包含了該外設的通用API
stm32f2xx_hal_ppp_ex.c/.h//外圍設備或模塊驅動程序的擴展文件。這組文件中包含特定型號或者系列的芯片的特殊API。以及如果該特定的芯片內部有不同的實現(xiàn)方式,則該文件中的特殊API將覆蓋_ppp中的通用API。
stm32f2xx_hal.c/.h//此文件用于HAL初始化,并且包含DBGMCU、重映射和基于systick的時間延遲等相關的API
其他庫文件
用戶級別文件:
stm32f2xx_hal_msp_template.c//只有.c沒有.h。它包含用戶應用程序中使用的外設的MSP初始化和反初始化(主程序和回調函數(shù))。使用者復制到自己目錄下使用模板。
stm32f2xx_hal_conf_template.h//用戶級別的庫配置文件模板。使用者復制到自己目錄下使用
system_stm32f2xx.c//此文件主要包含SystemInit()函數(shù),該函數(shù)在剛復位及跳到main之前的啟動過程中被調用。**它不在啟動時配置系統(tǒng)時鐘(與標準庫相反)**。時鐘的配置在用戶文件中使用HAL API來完成。
startup_stm32f2xx.s//芯片啟動文件,主要包含堆棧定義,終端向量表等
stm32f2xx_it.c/.h//中斷處理函數(shù)的相關實現(xiàn)
main.c/.h
根據(jù)HAL庫的命名規(guī)則,其API可以分為以下三大類:
- 初始化/反初始化函數(shù):HAL_PPP_Init(), HAL_PPP_DeInit()
- IO 操作函數(shù):HAL_PPP_Read(), HAL_PPP_Write(),HAL_PPP_Transmit(), HAL_PPP_Receive()
- 控制函數(shù):HAL_PPP_Set (), HAL_PPP_Get ().
- 狀態(tài)和錯誤:HAL_PPP_GetState (), HAL_PPP_GetError ().
“注意:目前 LL 庫是和 HAL 庫捆綁發(fā)布的,所以在 HAL 庫源碼中,還有一些名為 stm32f2xx_ll_ppp 的源碼文件,這些文件就是新增的LL庫文件。使用 CubeMX 生產項目時,可以選擇LL庫。
”
HAL 庫最大的特點就是對底層進行了抽象。在此結構下,用戶代碼的處理主要分為三部分:
處理外設句柄(實現(xiàn)用戶功能) 處理MSP 處理各種回調函數(shù) 外設句柄定義 ??用戶代碼的第一大部分:對于外設句柄的處理。HAL庫在結構上,對每個外設抽象成了一個稱為ppp_HandleTypeDef的結構體,其中ppp就是每個外設的名字。*所有的函數(shù)都是工作在ppp_HandleTypeDef指針之下。
-
多實例支持:每個外設/模塊實例都有自己的句柄。因此,實例資源是獨立的
-
外圍進程相互通信:該句柄用于管理進程例程之間的共享數(shù)據(jù)資源。
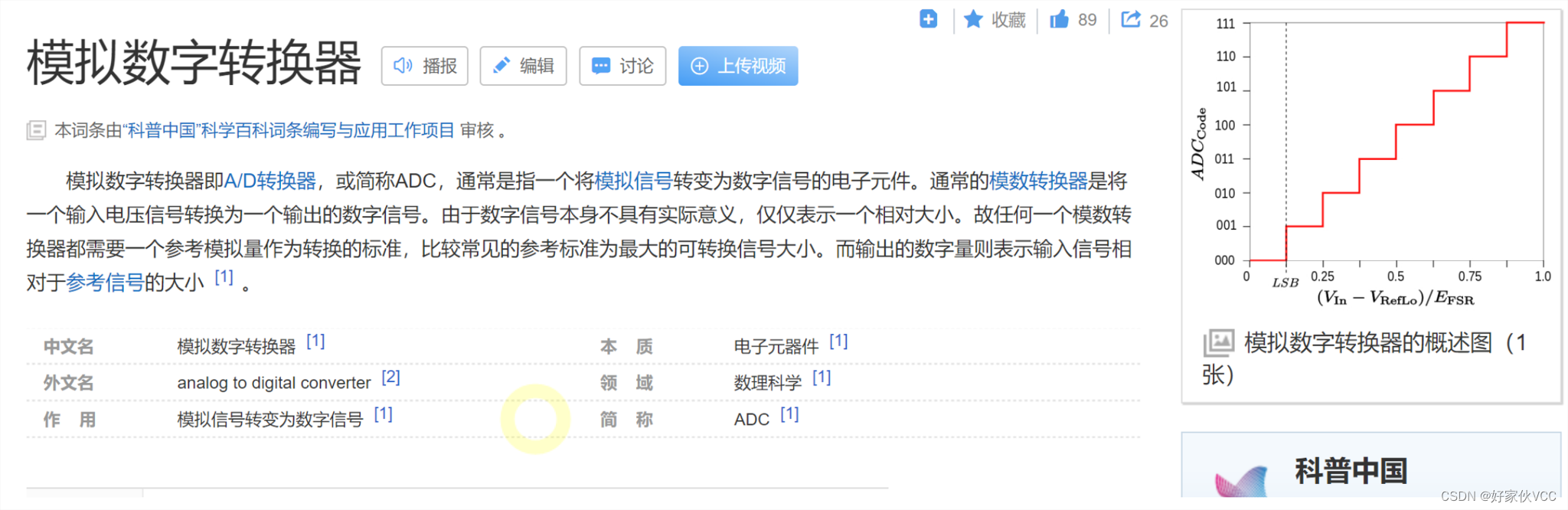
下面,以ADC為例
/**
*@briefADChandleStructuredefinition
*/
typedefstruct
{
ADC_TypeDef*Instance;/*!
ADC_InitTypeDefInit;/*!
__IOuint32_tNbrOfCurrentConversionRank;/*!
DMA_HandleTypeDef*DMA_Handle;/*!
HAL_LockTypeDefLock;/*!
__IOuint32_tState;/*!
__IOuint32_tErrorCode;/*!
}ADC_HandleTypeDef;
從上面的定義可以看出,ADC_HandleTypeDef中包含了ADC可能出現(xiàn)的所有定義,對于用戶想要使用ADC只要定義一個ADC_HandleTypeDef的變量,給每個變量賦好值,對應的外設就抽象完了。接下來就是具體使用了。
當然,對于那些共享型外設或者說系統(tǒng)外設來說,他們不需要進行以上這樣的抽象,這些部分與原來的標準外設庫函數(shù)基本一樣。例如以下外設:
- GPIO
- SYSTICK
- NVIC
- RCC
- FLASH
以GPIO 為例,對于HAL_GPIO_Init()函數(shù),其只需要GPIO地址以及其初始化參數(shù)即可。
1. 三種編程方式
HAL庫對所有的函數(shù)模型也進行了統(tǒng)一。在HAL庫中,支持三種編程模式:輪詢模式、中斷模式、DMA模式(如果外設支持)。其分別對應如下三種類型的函數(shù)(以ADC為例):
HAL_StatusTypeDefHAL_ADC_Start(ADC_HandleTypeDef*hadc);
HAL_StatusTypeDefHAL_ADC_Stop(ADC_HandleTypeDef*hadc);
HAL_StatusTypeDefHAL_ADC_Start_IT(ADC_HandleTypeDef*hadc);
HAL_StatusTypeDefHAL_ADC_Stop_IT(ADC_HandleTypeDef*hadc);
HAL_StatusTypeDefHAL_ADC_Start_DMA(ADC_HandleTypeDef*hadc,uint32_t*pData,uint32_tLength);
HAL_StatusTypeDefHAL_ADC_Stop_DMA(ADC_HandleTypeDef*hadc);
其中,帶_IT的表示工作在中斷模式下;帶_DMA的工作在DMA模式下(注意:DMA模式下也是開中斷的);什么都沒帶的就是輪詢模式(沒有開啟中斷的)。至于使用者使用何種方式,就看自己的選擇了。
此外,新的HAL庫架構下統(tǒng)一采用宏的形式對各種中斷等進行配置(原來標準外設庫一般都是各種函數(shù))。針對每種外設主要由以下宏:
- __HAL_PPP_ENABLE_IT(HANDLE,INTERRUPT):使能一個指定的外設中斷
- __HAL_PPP_DISABLE_IT(HANDLE,INTERRUPT):失能一個指定的外設中斷
- __HAL_PPP_GET_IT (HANDLE, __ INTERRUPT __):獲得一個指定的外設中斷狀態(tài)
- __HAL_PPP_CLEAR_IT (HANDLE, __ INTERRUPT __):清除一個指定的外設的中斷狀態(tài)
- __HAL_PPP_GET_FLAG (HANDLE,FLAG):獲取一個指定的外設的標志狀態(tài)
- __HAL_PPP_CLEAR_FLAG (HANDLE,FLAG):清除一個指定的外設的標志狀態(tài)
- __HAL_PPP_ENABLE(HANDLE) :使能外設
- __HAL_PPP_DISABLE(HANDLE) :失能外設
- __HAL_PPP_XXXX (HANDLE,PARAM) :指定外設的宏定義
- _HAL_PPP_GETIT_SOURCE (HANDLE, __ INTERRUPT __)檢查中斷源
2. 三大回調函數(shù)
在 HAL 庫的源碼中,到處可見一些以__weak開頭的函數(shù),而且這些函數(shù),有些已經(jīng)被實現(xiàn)了,比如:
__weakHAL_StatusTypeDefHAL_InitTick(uint32_tTickPriority)
{
/*ConfiguretheSysTicktohaveinterruptin1mstimebasis*/
HAL_SYSTICK_Config(SystemCoreClock/1000U);
/*ConfiguretheSysTickIRQpriority*/
HAL_NVIC_SetPriority(SysTick_IRQn,TickPriority,0U);
/*Returnfunctionstatus*/
returnHAL_OK;
}
有些則沒有被實現(xiàn),例如:
__weakvoidHAL_SPI_TxCpltCallback(SPI_HandleTypeDef*hspi)
{
/*Preventunusedargument(s)compilationwarning*/
UNUSED(hspi);
/*NOTE:Thisfunctionshouldnotbemodified,whenthecallbackisneeded,theHAL_SPI_TxCpltCallbackshouldbeimplementedintheuserfile
*/
}
所有帶有__weak關鍵字的函數(shù)表示,就可以由用戶自己來實現(xiàn)。如果出現(xiàn)了同名函數(shù),且不帶__weak關鍵字,那么連接器就會采用外部實現(xiàn)的同名函數(shù)。通常來說,HAL庫負責整個處理和MCU外設的處理邏輯,并將必要部分以回調函數(shù)的形式給出到用戶,用戶只需要在對應的回調函數(shù)中做修改即可。HAL 庫包含如下三種用戶級別回調函數(shù)(PPP為外設名):
-
外設系統(tǒng)級初始化/解除初始化回調函數(shù)(用戶代碼的第二大部分:對于MSP的處理):
HAL_PPP_MspInit()和HAL_PPP_MspDeInit例如:__weak void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)。在HAL_PPP_Init() 函數(shù)中被調用,用來初始化底層相關的設備(GPIOs, clock, DMA, interrupt) -
處理完成回調函數(shù):
HAL_PPP_ProcessCpltCallback(Process指具體某種處理,如UART的Tx),例如:__weak void HAL_SPI_RxCpltCallback(SPI_HandleTypeDef *hspi)。當外設或者DMA工作完成后時,觸發(fā)中斷,該回調函數(shù)會在外設中斷處理函數(shù)或者DMA的中斷處理函數(shù)中被調用 -
錯誤處理回調函數(shù):
HAL_PPP_ErrorCallback例如:__weak void HAL_SPI_ErrorCallback(SPI_HandleTypeDef *hspi)。當外設或者DMA出現(xiàn)錯誤時,觸發(fā)終端,該回調函數(shù)會在外設中斷處理函數(shù)或者DMA的中斷處理函數(shù)中被調用。
參考文檔及網(wǎng)文鏈接
ST-Description of STM32F4 HAL and LL drivers.pdf
ST-en.stm32_embedded_software_offering.pdf
https://mp.weixin.qq.com/s/GxvIvbxagSPvKuYSXcSVTw
版權聲明:文章轉自網(wǎng)絡。版權歸原作者所有,如有侵權,請聯(lián)系我們刪除!
-
STM32
+關注
關注
2289文章
11011瀏覽量
362263 -
函數(shù)
+關注
關注
3文章
4367瀏覽量
64150 -
HAL
+關注
關注
2文章
72瀏覽量
12972
原文標題:STM32標準庫和HAL庫有什么不同?我們怎么用?
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
基于STM32 HAL庫與標準庫的esp8266接入機智云方案(二)

STM32已經(jīng)用標準庫寫好的代碼,怎么導入RT THREAD?
STM32開發(fā)入門進階必備!《STM32嵌入式系統(tǒng)開發(fā)—基于STM32CubeMX和HAL庫》新書發(fā)布!
STM32WBA52CEU可以用標準庫開發(fā)嗎?
AI開源模型庫有什么用
HAL庫在Arduino平臺上的使用
HAL庫和標準庫的區(qū)別 HAL庫與CMSIS的關系
HAL庫的函數(shù)調用示例
HAL庫在STM32開發(fā)中的重要性
如何快速入門HAL庫編程 HAL庫與裸機編程的比較
HAL庫在嵌入式系統(tǒng)中的應用
第12章-ADC采集電壓和顯示 基于STM32的ADC—電壓采集(詳細講解+HAL庫)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論