

摘要:
在中國制造2025的大背景下,隨著智能制造與裝備、高新精密加工及工業物聯網技術的發展,對非接觸精密測量的要求不斷提高。激光三角測量法以其精度高、穩定性好、壽命長、響應速度快等優勢,被廣泛應用于各個不同的測量場景。針對激光三角測量技術展開調研,介紹激光三角測量技術的原理及關鍵技術。詳述激光三角測量技術在工業生產、航天軍工、生物醫學等諸多領域的應用,重點涉及高精度、高速度、復雜物面與環境的智能測量。結合激光三角測量技術應用現狀及現代科學技術潮流趨勢,簡析激光三角測量技術的發展應用前景。
關鍵詞:
激光三角測量; 非接觸精密測量; 高速度; 復雜物面; 復雜環境
0 引言
進入21世紀以來,隨著人工智能技術的不斷發展,基礎科學研究的突破、材料加工水平的提高以及計算機信息技術的應用改變了人們的生活。近年來,人工智能技術的飛躍,促使工業、農業、生物、物流、軍事以及社會服務等諸多領域不斷走向自動化與智能化。精準的信息感知是自動化與智能化的前提和基礎,其對精密測量技術提出了更高的要求。其中,接觸式測量由于操作復雜、易產生形變誤差、耐久性差等原因,無法滿足一些測量場景的需求,逐漸被非接觸式測量方法替代。
激光具有單向性好、亮度高、能量集中且穩定的特性,被廣泛應用于精密測量領域。基于激光的非接觸測量方法有干涉法[1-2]、脈沖法[3-4]、相位法[5-6]和三角法。干涉法利用反射條紋的明暗變化測量距離,精度高(可達nm量級),但僅適用于微距離測量。脈沖法對測時技術及電子元器件要求較高,且測量誤差較大(精度m級),僅適用于大場景測量。相位法利用激光往返相位差計算測量距離,適用于中距離測量(精度mm級)。相較而言,三角法具有測量速度快、精度高(μm級)、穩定性好、成本低的特點,目前可以實現中、短距離的測量,應用場景更為廣泛。
本文重點圍繞激光三角測量方法在不同場景的應用進行了調研。首先,介紹激光三角測量法的原理及關鍵技術難點;接著,詳述激光三角測量法在高精度、高速度、復雜物面及環境下的測量應用;最后,結合激光三角測量技術應用現狀及科技發展趨勢,簡要剖析激光三角測量法的應用前景。基于對激光三角測量技術的應用與前景調研總結,為研究人員或工程人員在實際應用中選擇合理的方法提供參考。這將有助于明確激光三角測量技術的進一步發展方向。
1 激光三角測量技術原理
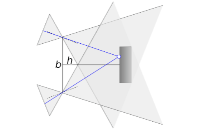
將點激光或線激光投射到被測物表面,經過發射鏡組調制后,在物體表面形成具有一定大小和形狀的光斑或激光條紋;接收鏡組將激光光斑或條紋成像到光電成像器件上,采用相關圖像處理技術得到光斑像素中心或條紋中心線;將被測目標的位移或形狀變化轉變為光電探測器上成像點(線)的位置變化,通過幾何三角關系可以準確計算出一維位移、二維輪廓或三維表面形貌[7-8]。
光源和成像器件是激光三角測量中兩個主要光電器件。考慮到成本、質量以及連續發光等要求,現有激光三角測量系統主要以半導體激光二極管作為光源。常用成像器件有光電位置傳感器(position sensitive detector,PSD)、互補金屬氧化物半導體(complementary metal oxide semiconductor,CMOS)和電荷耦合元件(charge coupled device,CCD)。PSO、CMOS和CCD性能比較如表1所示。現階段主要以CMOS和CCD為主。
表1 PSD、CMOS和CCD性能比較
Tab.1 Performance comparison of PSD,CMOS and CCD
成像
器件精度及
成像質量響應速度穩定性功耗價格
PSD低快差低便宜
CMOS較好快好低便宜
CCD好慢好高昂貴
2 激光三角測量關鍵技術
激光三角測量技術歷經多年發展,雖已趨于成熟,但由于技術手段的不斷革新,仍存在許多有待解決的問題。其中,涉及諸多關鍵技術。
①光學建模技術。
對于激光三角測量系統而言,光學模型在源頭上決定了測量系統的精度。現有激光三角測量技術大多基于理想的幾何光學模型,光束在傳輸的實際過程中由于反射、透射和漫射造成能量的損失,最終在光敏器件上的成像結果與理論存在一定的偏差。建立接近實際的光學模型,能夠從本質上提高激光三角測量系統的精度。所以,光學建模是一項核心技術[9]。
②電路信號處理技術。
電路信號處理模塊對成像器件的信號進行整流、濾波和放大,對激光成像光斑或條紋進行初步的濾噪,減輕了后續頂層算法的工作量,進一步提高了測量精度。
③成像圖像處理技術。
通過頂層算法,對激光三角法得到的激光光斑或條紋進行處理,準確獲取光斑的中心點深度信息或激光的條紋中心線。在實際場景中,往往難以獲得理想的中心點或中心線。因此,兼顧精度、速度和魯棒性的智能提取算法是激光三角測量中的一大技術難點[10]。
④標定及誤差補償技術。
通過標定的方法進行誤差補償,是確保系統測量精度的最后關鍵環節。對于一維激光三角測量系統的標定工作,可以采取非線性方程求解、插值和擬合的方式。而二維激光三角測量系統的標定工作就復雜得多。技術人員分別采取了平面、鋸齒形、凹凸量塊作為標定物進行標定[11-13]。但這些方法或過于復雜,或難以保證標定物的加工精度。因此,需要研究操作簡單且可靠的標定方法[14]。
3 激光三角測量技術的應用
3.1 高精度微位移測量
隨著微加工技術的不斷發展,各領域對微位移的高精度測量需求不斷增大,例如航天軍工、超精密工業生產以及生物信息檢測等。激光三角法測量分辨力可達μm量級,適用于超精密微位移測量的場合。
工業精密測量與裝配中,小尺寸器件(膠片、芯片、微軸承等)的高精度檢測對產品的質量起到重要的作用。在汽車制造工業中,汽車輪胎膠片兩端搭接牢固程度決定了輪胎的質量,關系到汽車的行駛安全。馮召東[15]基于線激光三角測量,根據采集到的激光點云數據,通過投影進行三維重建,獲得輪胎膠片的三維形貌。此外,馮召東通過主成分分析的方法提取激光條紋中心線,進一步提高了測量精度。在電路板芯片貼片工業流程中,需要保證芯片引腳具有較高的共面度。這對精密測量及定位提出了更高要求。同時,為了保證芯片在檢測過程中不受磨損,非接觸式三角測量法成為了首選。魏澤等[16]基于線激光三角法實現對芯片引腳共面度高精度檢測,利用隨機抽樣一致(random sample consensus,RANSAC)算法對芯片引腳進行分割,并通過均值聚類確定激光點云數據中引腳位置,對數據平面進行最小二乘擬合,以實現對芯片引腳的共面度評價。上海交通大學陳家興等[17]研究了光斑的高精度定位算法,應用于自主研發的激光位移傳感器中,解決了3C等領域的高精度在線測量問題。
在生物檢測與醫療領域中,激光三角法主要用于對物體表面三維結構信息的獲取或精確定位,例如對牙齒的三維形貌掃描以輔助進行牙齒矯正治療,在微創手術過程中也可利用激光三角法進行實時定位導航[18]。近年來,國內外諸多不同領域研究學者將激光三角測量與原子力顯微鏡相結合,進行細胞操作或納米材料合成的相關基礎研究工作[19]。
3.2 高速動態測量
激光三角測量法具有較快的響應速度,被廣泛應用于各種高速動態測量及安全監測場景中。
在工業生產線中,靜態檢測往往耗時長。動態檢測能夠大大提高產品檢測的效率,提升生產線的自動化程度。點膠機對電路板或相關元器件進行點膠工作時,需要快速移動點膠機針頭進行相關定位操作。其中,接觸式點膠機分液時需要對Z方向間隙高度進行精準的動態控制。大連理工大學張青青[20]利用激光三角原理制成的測距傳感器,實現對點膠機高度間隙精準控制,在動態移動過程中的測量精度可達5 μm。
激光三角測量法近年來被廣泛應用于鐵路交通運輸行業的動態安全監測[21]。輪緣厚度和輪緣寬度是保證列車安全的關鍵參數。Jian等[22]提出了一種基于激光位移傳感器的輪對輪緣厚度和輪緣寬度實時測量方法,將三個激光位移傳感器夾在鋼軌上,光線穿過鋼軌之間的縫隙。輪緣厚度和輪緣寬度可由三個激光位移傳感器進行動態實時測量。Gigada等[23]利用激光三角測量法對車輛在行駛過程中的道路紋理進行實時檢測,以獲得路面與輪胎之間的摩擦因數,為車輛速度的控制提供寶貴的提示信息。上海交通大學在國家863項目的支持下,基于線激光和視覺檢測技術,成功研制我國首臺高速鐵路扣件在軌探測系統[24]。
3.3 復雜物面測量
實際測量物面往往未必規則,性狀比較復雜,例如曲面、粗糙度以及顏色變化等。激光三角測量法可通過光路結構的優化和相關補償算法,實現對復雜物面的普適應性測量。
曲面測量容易產生遮擋、成像光斑漂移等現象。Clark J.等[25]利用偏振光作為激光三角測量系統的光源,實現對金屬曲面的精準測量。為了進一步提高激光三角測量法對曲面的測量速度,Liu等[26]利用線激光三角測量法在曲面投影出形貌特征并進行三維測量,實現了曲面的高精度高速度測量。
對粗糙度較大的物面進行測量時,由于其表面特性存在大量微小凹凸,導致激光束達到物面后形成不規則的反射。對于激光三角法測量而言,多重不規則反射將導致成像器件出現多個光斑造成干擾并影響測量精度。Keyence提出一種多重反射消除算法(multiple reflection cancel,MRC),通過比較成像器件兩幀波形的相關性,濾除了由于多重反射造成的成像干擾,實現了對粗糙物面的精準測量。
物體表面由于顏色的變化將導致折射率的不同,使得激光三角法成像系統獲得的光斑強度發生變化,導致輸出位移值偏差。Jung等[27]提出了一種基于三角測量的PSD強度控制方法,實現了對目標顏色變化的高度線性控制。上海交通大學現代傳感與光電檢測研究室提出了一種光強自適應算法以適應目標物不同顏色造成的光強變化,同時采用光學系統建模的方法對成像光斑形狀進行修正,以提高普遍適用性[28-29]。
3.4 復雜環境測量
環境的不可抗因素對測量精度的影響不可忽視。現代智能制造及裝備要求測量系統能夠適應各種復雜的環境變化,激光三角測量技術可適應多種復雜測量環境[30]。
水面環境由于流體的運動,會導致測量面的不穩定。Liu等[31]采用單點激光三角法實現水面油膜厚度的在線測量。激光入射到被測油膜的上下表面并形成光斑,兩個光斑經光學鏡組在CCD上成像。通過成像點的位移和成像系統的結構參數,可以得到被測油膜的厚度。
激光三角測量法也被應用于各類高溫場測量場景中。玻璃生產環境溫度最高達600 ℃。Wang等[32]基于激光三角測量法并利用溫度補償曲線進行修正,對玻璃厚度進行實時監測,提高了生產效率。孫德榮[28]利用單點激光三角法,提出一種二值化處理方法,實現了對高溫超導磁懸浮列車懸浮高度的測量。
太空環境因輻射、溫度等因素影響而尤為復雜,航天器對大型空間站進行表面巡檢,是保證空間站長期安全、穩定工作的前提,巡檢航天器與空間站的相對導航需以超高精密測量技術為基礎。王振宇等[33]利用線激光三角測量系統與慣性位姿推算系統組合的方式,以獲取巡檢飛行器與空間站的相對導航參數;利用噴氣動力裝置適時調整激光器與相機的相對位置,以確保成像圖像的質量;通過與慣導數據的進一步融合,提高了巡檢導航系統的整體精度。上海交通大學陶衛等在該方面做了大量的工作,通過激光三角位移傳感器實現了空間飛行器姿態的精確測量。
4 激光三角測量技術的發展前景
激光三角測量技術經國內外研究人員多年積累,技術逐漸趨于成熟,但仍有許多關鍵技術待解決。激光三角測量技術的研發應用前景及趨勢如下。
①微型化。光學鏡片、電路集成以及微機電系統(micro-electro-mechanical system,MEMS)加工技術的進步,為激光三角測量系統的微型化提供了技術支撐,實現了激光三角技術在極小空間的測量。
②智能化。在計算機和人工智能技術不斷突破創新的時代浪潮下,智能算法提高了激光三角測量系統的工作效率和普遍適用性。通過“以軟代硬”的方式,實現了復雜物面及復雜環境的自主適應并完成測量工作。
③大量程。現階段激光三角測量法主要應用于中短距離測量,由于接收鏡組邊緣成像畸變及成像器件的非線性導致量程遠端誤差較大。隨著光學理論研究及技術的不斷發展,利用光學模型進行系統誤差補償,進一步擴大了激光三角測量法的工作量程。
④多參數。隨著復雜系統的研發水平不斷提高,激光三角測量系統結構逐漸呈現多個子系統嵌套組合的模式,以實現多參數同步測量。以機器人位姿測量為例,激光三角測量系統將實現對機器人位置及姿態參數同步輸出。
⑤多傳感融合。多傳感器融合技術運用于激光三角測量系統,利用激光、視覺圖像與慣導技術的深度融合實現信息全方位檢測,可廣泛應用于物聯網、智慧城市、公共安全監測等一系列大樣本數據智能感知應用場景。
5 結束語
激光三角測量技術是一種經典的非接觸高精度測量方法。隨著現代光電技術、MEMS加工技術、計算機智能技術的進步,激光三角測量技術在光學模型、電路集成、軟件算法等各個關鍵技術環節不斷發展,多年來一直被廣泛應用于各種測量場景。激光三角測量法被應用于生物醫學、航空航天、交通運輸、工業生產各個領域,既可進行靜態超高精度測量,又可進行高速動態跟蹤測量;同時,通過各種算法融合,可實現對復雜物面和復雜環境的適應性測量。
未來,激光三角測量技術依舊具有廣闊前景和研發價值,它將朝著微型化、智能化、大量程、多參數以及多傳感融合的方向不斷發展。
責任編輯:haq
-
激光
+關注
關注
20文章
3425瀏覽量
65814 -
測量
+關注
關注
10文章
5175瀏覽量
112935 -
智能制造
+關注
關注
48文章
5825瀏覽量
77471
原文標題:激光三角測量技術的應用與前景
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
馬達控制上必要的知識 三角函數
激光位移傳感器數據采集系統原理
用DAC8562輸出一個三角波測試,用示波器發現輸出的三角波有毛刺,怎么解決?
常見的三維測量方法和工具
明治案例 | 【±0.1%F·S精度】【點激光位移】3C零件厚度測量

淺談電動機三角接法是什么意思?舉例分析
三相電機三角形連接有哪些參數關系?
什么是三相電機三角形接法?定義是什么?
三角波發生器的組成和應用
數字示波器的測量方法有哪三種
三角形連接和星形連接的基本概念和特點
三相負載與三角聯結的關系
3D三維掃描儀的光學測量技術知識





 工商網監
工商網監

評論