 淺析德州儀器運動相機和手持云臺解決方案
淺析德州儀器運動相機和手持云臺解決方案
Other Parts Discussed in Post:TLV320AIC3204
伴隨互聯網的迅猛發展與5G時代的到來,短視頻成為了行業最火熱的風口。智能手機加速更新換代的同時,運動相機與手持穩定器由于應用場景的多元化,以及性能和價格的優勢,逐漸受到年輕人的喜愛。
1.運動相機系統介紹
相比于傳統的數碼相機,運動相機采用電子防抖的方式,在實際拍攝時只有部分的畫面,通過內置陀螺儀和加速度計對攝像機抖動方向進行模糊判斷,利用處理器的資源進行計算、并對剩下的畫面進行補充,從而產生防抖的效果。隨著處理器的不斷發展,電子防抖由于其成本的優勢,成為了運動相機的主流防抖方式。
詳細的運動相機系統框圖如下:
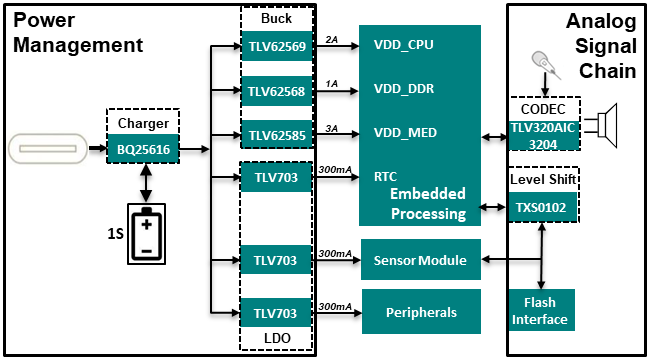
信號鏈部分,麥克風和鏡頭模組采集音視頻信號,通過相應的編解碼器后送入MCU進行處理,采用用戶自定義的防抖的算法,最終將清晰的視頻還原出來。
音頻編解碼器設備的主要組件是模數轉換器(ADC),數模轉換器(DAC)和數據接口總線,用于在編解碼器和微控制器( MCU)或DSP。隨著便攜式應用程序中系統復雜度的增加和尺寸的減小,功能集成成為設計人員的一種有吸引力的選擇。用戶可以使用I2C?或SPI?通信協議進行訪問配置音頻編解碼器的相關寄存器。該器件可以在嘈雜的環境中從低電平遠場信號中提取清晰的語音/多麥克風陣列。可能還需要一些邏輯器件如電平轉換器件來匹配Flash或者外設接口與處理器之間的電平不兼容的問題。
電源軌部分,通常是5V的USB接口,經過充電芯片為系統供電/鋰電池進行充電。當沒有外接外部供電時,電池會經過高效率的DC-DC芯片為系統提供電能。為了保證畫質的穩定以及MCU的性能,通常采用具有低噪聲的LDO對鏡頭模組以及MCU的時鐘供電。
動相機系統中。電池的節數大都是在1節。隨著人們對于高品質視頻的追求,在畫質以及幀數提升的同時,處理器的功耗也會隨之不斷增加。TI的充電芯片還可以提電源路徑管理的功能,可以靈活的配置充電過程中電源輸入、電池與系統負載之間的關系,還可以通過JEFET根據實際溫度調節合適的充電電流。高效率的供電方案可以減小系統的體積并且延長使用時長,也降低了開發者的設計難度。
運動相機對芯片的封裝和功耗有嚴格的要求。TI的產品非常的豐富,這里簡單推薦幾款IC,關心的指標主要是功耗和封裝。
運動相機方案匯總
| Part number | 功能 | 功耗 | 封裝 | 特點 |
| BQ25616 | 充電芯片 | 9.5-μA待機功耗 | 4.00mm × 4.00mm | OTG, NVDC, JEITA,1節電池3A高效充電芯片 |
| TLV62568 | 降壓芯片 | 35μA,關斷2uA | 1.60mm × 1.60mm | SOT-23,1A 高效降壓芯片 |
| TLV62569 | 降壓芯片 | 35μA,關斷2uA | 1.60mm × 1.60mm | SOT-23, 2A 高效降壓芯片 |
| TLV62585 | 降壓芯片 | 35μA,關斷2uA | 1.60mm × 1.60mm | QFN/ SOT-23, 3A 高效降壓芯片 |
| TLV703 | LDO | 35μA | 2.90mm × 1.60mm | 300mA 低 Iq 低壓降 LDO |
| TLV320AIC3204 | 音頻編解碼器 | - | 5.00mm × 5.00mm | Power TuneTM ,超低功耗立體聲音頻編解碼器 |
| TXS0102 | 電平轉換器 | - | 1.40mm × 1.00mm | 2位雙向電平轉換器 |
2.手持穩定器系統介紹
手持穩定器又稱手持云臺,是無人機云臺的衍生品,將無人機上運用的自動穩定協調系統的技術運用轉移到手機(或相機)拍攝上,是一種高科技的便攜式移動攝影器材。相對于傳統的斯坦尼康式機械穩定器,手持云臺這種電子穩定器極大的簡化了拍攝者的拍攝難度。該裝置內置的陀螺儀傳感器檢測到三軸抖動的位置和方向后,通過MCU處理這些數據并且驅動俯仰軸,橫滾軸以及航向軸的三個電機,通過轉動來產生與我們手部抖動相反的作用力,從而抵消畫面的震動,實現拍攝視頻的穩定性。
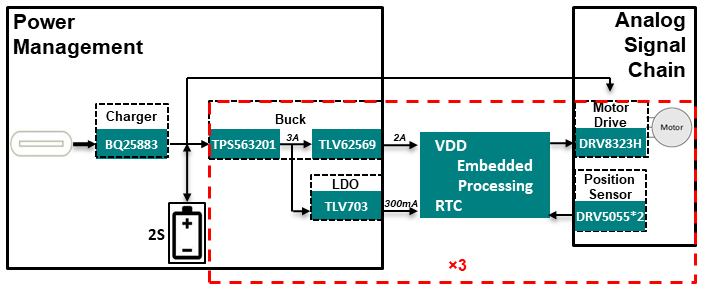
詳細的手持穩定器系統框圖如下:
手持穩定器方面對芯片的封裝和功耗也有嚴格的要求。如下是TI在手持穩定器方面解決方案匯總。
手持穩定器方案匯總
| Part number | 功能 | 功耗 | 封裝 | 特點 |
| BQ25883 | 充電芯片 | 30uA | 4.00mm x 4.00mm | I2C 控制,2 節電池 2A 升壓充電器 |
| TPS563201 | 降壓芯片 | 關斷1uA | 1.60mm x 2.90mm | 4.5V 至 17V 輸入、3A 輸出、同步 SWIFT 降壓轉換器 |
| TLV62569 | 降壓芯片 | 35μ,關斷2uA | 1.60mm x 1.60mm | SOT-23, 2A 高效降壓芯片 |
| TLV703 | LDO | 35 μA | 2.90mm × 1.60mm | 300mA 低 Iq 低壓降 LDO |
| DRV8323 | 三相馬達驅動 | - | 6.00mm × 6.00mm | 具有三個分流放大器的 60V 三相智能柵極驅動器 |
| DRV5055 | 線性霍爾傳感器 | - | 2.92mm × 1.30mm | 高精度 3.3V 或 5V 比例式雙極霍爾效應傳感器系列 |
電源軌部分,一般通過USB接口,采用充電芯片為系統供電/鋰電池進行充電。考慮到云臺無刷電機驅動的效率,通常會采用多節鋰電池為電機驅動供電,較高的母線電壓還可以降低主回路中的電流,減少不必要的線損。此外,為了保證系統的性能和待機時長,還需要采用高效的降壓芯片為處理器進行供電,以及低噪聲的LDO為處理器的時鐘提供基準。
信號鏈部分:通過兩個線性霍爾傳感器檢測無刷直流電機位置的偏移,處理器將檢測到三軸抖動的位置和方向的偏移量,執行相應的算法。通過驅動芯片來驅動無刷電機補償該偏移量,最終實現視頻的穩定拍攝。
審核編輯:金巧
-
電源管理
+關注
關注
115文章
6185瀏覽量
144625 -
ldo
+關注
關注
35文章
1944瀏覽量
153540 -
運動相機
+關注
關注
0文章
42瀏覽量
8979
發布評論請先 登錄
相關推薦
德州儀器獲16億美元美國芯片補貼
淺談德州儀器FPD-Link解決方案
德州儀器2024年電源設計研討會線上系列順利舉行
德州儀器股票分析:增長已經放緩的德州儀器,該買入還是賣出?


介紹三款德州儀器的創新產品和解決方案
德州儀器攜多款創新方案亮相慕尼黑上海電子展






 工商網監
工商網監
評論