 掃地機器人設計挑戰
掃地機器人設計挑戰
隨著世界變得越來越自動化,使用常規立式吸塵器清潔房屋感覺苦不堪言。自 2002 年首臺掃地機器人上市以來,清潔機器人的功能和可用選項大幅增加。事實上,許多優質機器人真空吸塵器目前已進入第六代。
推動這一變化的因素- 無論是比喻含義還是字面含義 - 是使您的現代掃地機器人流暢運行的一個器件 - 電機驅動。如同今天的家用機器人助手一樣,電驅動的尺寸持續縮小,同時性能也在提高。
在本文中,我將回顧真空機器人的主要特點和當前趨勢,以及電機驅動如何幫助滿足這些要求。
展望未來,預計真空機器人將變得不那么笨拙(換言之,不那么容易迷失方向)且運行更快。設計尺寸也將繼續縮小,使他們能夠清潔諸如廚柜或低間隙家具之類的狹窄部位。
掃地機器人設計挑戰
電池壽命和可靠性是真空機器人面臨的兩大設計挑戰。大多數掃地機器人都是電池供電的,并從電源座充電。掃地機器人的典型框圖如圖 1 所示。
電機是掃地機器人的重要組成部分。如何驅動電機以及使用何種電機驅動決定電池壽命和可靠性。
讓我們回顧一下控制掃地機器人消耗的大部分功率的主要系統模塊、所涉及的主電機,以及確定哪種電機驅動將控制并降低功耗的系統要求:
掃地機器人的主吸力是通過一個運行在 3 到 4A 的電機來完成的,通常具有高達8A的峰值電流。效率和全面保護是關鍵要求。該電機通常由無刷電機驅動進行驅動,以降低噪音并提高效率。
兩個雙向輪使用有刷電機驅動。早期型號只能向一個方向移動,但雙向輪在解鎖機器人或使其從困難的位置改變方向時非常有用。這些是低速電機,帶典 <1A 的典型均方根(RMS)額定電流。與光滑的瓷磚或硬木地板相比,需要更好的扭矩在諸如地毯等更粗糙的地板類型移動。另一個關鍵要求是監控輸出電流,且如果電流持續較長時間,則向微控制器(MCU)發送反饋,這可能表明真空機器人卡住了。
主刷使用位于掃地機器人中心的有刷電機,用于攪動和拉動地板上的污垢。這是一款中速電機,額定RMS電流約為3A。
取決于掃地機器人和品牌的類型,可能有一個或兩個單向側刷以中速運行。這些側刷通過向內朝向機器人的中心旋轉而將污垢驅動到主刷上。RMS電流額定值 <1A。
我提及的大多數電機都是有刷電機,RMS電流額定值從 1A 到 3A 不等,
在前幾代掃地機器人中,跨分流電阻的外部電流感應處理輸出電流的監測和感應。這些分流電阻器體積大,價格昂貴,占用了電路板上的大量空間。使用外接笨重的高值分流電阻也會增加功耗,從而減少機器人的電池使用時間。
圖3所示為早期一代掃地機器人的框圖,其中DRV8870需要外部分流電阻來感應電流,而外部放大器則需要向MCU發送反饋。這需要額外的電路板空間,增加成本,并增加了布線復雜性和維護。
將DRV8870替換為DRV8874或DRV8876無需感應電阻和放大器,因為電流感應反饋在內部發生,如圖 2 所示。
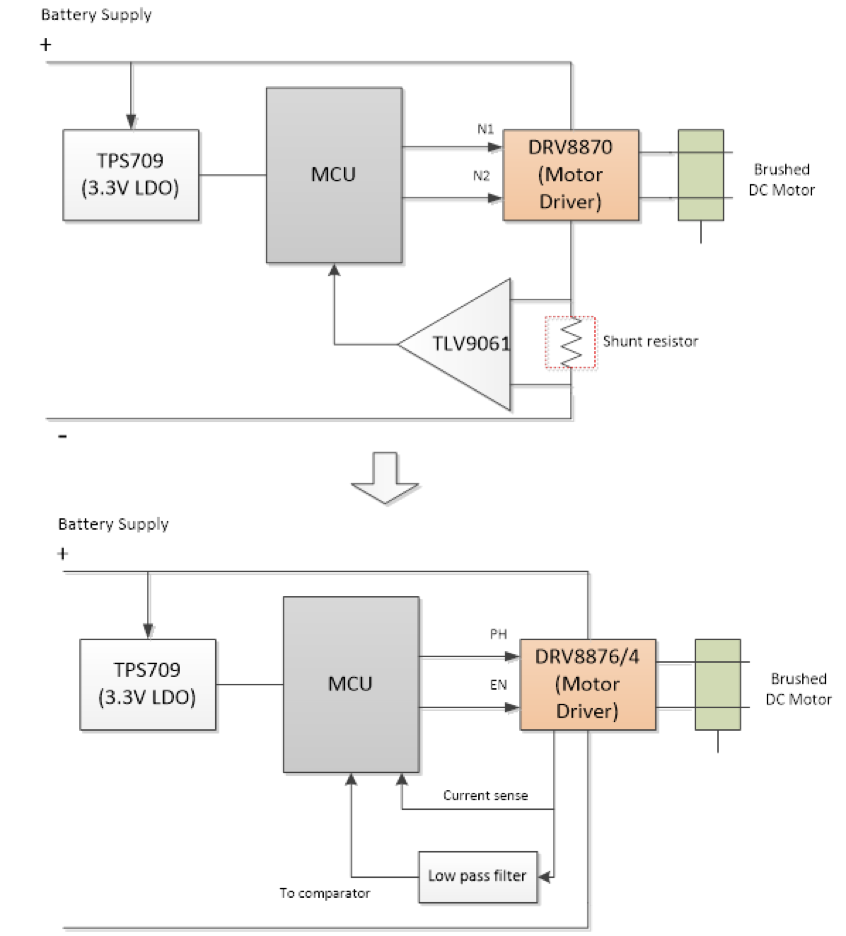
圖2:驅動雙向電機,將 DRV8870 替換為 DRV8874 或 DRV8876 的示例
圖 3 所示為 DRV8870 和 DRV8876 之間分流電阻尺寸的減小。
如果電機需要為雙向型(如在車輪或主刷電機中),則驅動需要兩個輸入(N1和N2),以使用兩個MCU管腳驅動電機。
掃地機器人還具有單向側刷。使用單向驅動時,DRV8874或DRV8876只需要一個輸入管腳(EN管腳),從而減少 MCU 引腳,如圖 4 所示。
DRV8874 和 DRV8876 具有多種優勢,可延長電池壽命和可靠性。集成電流感應無需外接分流電阻器,節省了材料成本和空間,同時顯著減少了設計工作量。
電流感應的增加也無需用于反饋的外接增益放大器。這些器件的低睡眠電流和無龐大的分流電阻有助于降低功耗并延長真空機器人的電池壽命,而內部電流感應可實現主動失速監控,以確定電機是否卡在某個位置,或者是否有車輪老化或磨損。要了解有關內部電流感應和IPROPI的更多信息,請參閱技術文檔[1]。
DRV887x系列有刷電機采用 Pin-2 管腳 RDS(on)可擴展型,可覆蓋高達 10A 的寬范圍峰值電流。DRV8876采用3mm×3 mm四方扁平無管腳封裝。
隨著掃地機器人的實用性增加,它們的功耗和再充電所需的時間也增加。通過添加集成功能,DRV8876 和 DRV8874 可在節省空間和成本的同時降低總體功耗,從而有助于解決公用事業面臨的挑戰。
審核編輯:何安
-
模擬
+關注
關注
7文章
1426瀏覽量
83938
發布評論請先 登錄
相關推薦
智能掃地機器人的工作原理和構成
霍爾元件在掃地機器人中的應用
霍爾開關在掃地機器人中的應用

掃地機器人的核心技術突破
掃地機器人避障技術的發展史
供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
掃地機器人高溫高濕試驗標準詳解及試驗方法

光耦知識分享‖探討光耦技術在掃地機器人的應用

其利天下技術·搭載無刷電機的掃地機器人的前景如何?
鴻蒙南向開發實戰:【智能掃地機】
掃地機器人CCC認證申請流程與其他產品的區別是什么?






 工商網監
工商網監
評論