 探秘DLP NIRscan Nano評估模塊
探秘DLP NIRscan Nano評估模塊
作為工程師和開發人員,我們的工作就是找到一個將所有元件組合在一起的最佳方法。不管是對于摩天大樓、還是集成電路,內部工程結構都是決定是否能夠運轉良好的關鍵之一。但說回來,又有誰不曾幻想做個“破壞王”,把東西都拆開來一探究竟呢?我們最初的與工程設計有關的記憶大部分都來自小時候把看起來復雜——甚至是昂貴——的東西拆得七零八落。
既然如此,我們就打算看一看DLP NIRscan Nano評估模塊(EVM)的內部構造,我們將用老辦法——拆開它。
需要注意的是,任何對光引擎的拆解都會使NIRscan Nano EVM的保修失效。另外,去掉光引擎上的罩子會使灰塵和污垢聚集在光學器件上,從而影響到系統性能。此外,去掉上面的罩子會移動光學器件、狹縫和探測器,導致這些元件錯位,從而需要廠家重新進行對準和校準。而一旦拆除狹縫,則需要把InGaAs探測器和DLP2010NIR返廠進行系統對準與校準。
總之一句話,這事兒不能在家里嘗試。
我們先來快速瀏覽一下。基于DLP的分光計用一個針對波長選擇的數字微鏡器件(DMD)和單點探測器取代了傳統線性陣列探測器。通過按序打開與特定波長光相對應的一組鏡列,對應光線被指向探測器,并被捕獲。通過掃描DMD上的一組鏡列,可以計算出吸收光譜。
近紅外(NIR)光譜分析內的DLP技術可提供以下優勢:
與使用具有極小像素的線性陣列探測器相比,使用更大的單點1毫米探測器能實現更高性能。
使用單元探測器和低成本光學器件能幫助實現更低的系統成本。高分辨率DMD使得定制圖形能夠補償每一個單獨系統的光學失真。
更大信號的捕獲不僅得益于DMD相比傳統技術更大的光展量(etendue),而且也受益于其快速、靈活、以及可編程的顯示模式及光譜濾波器設計。
借助可編程顯示模式,DLP分光計能夠:
通過控制一個鏡列中的像素數量來改變到達探測器的光的強度。
通過控制鏡列的寬度來改變系統的分辨率。
通過使用一組Hadamard圖形完成在一個圖形內捕捉多個波長的光。然后,單獨的波長數據可通過解碼獲取。每個模式內打開DMD像素數量的50%,從而將比上面提到的列掃描方式獲取的更強的信號引至探測器。
使用定制光譜濾波器來選擇需要的特定波長。
目前,DLP NIRscan Nano EVM軟件支持可變分辨率和Hadamard圖形。暫不支持可變強度和定制光譜濾波器。
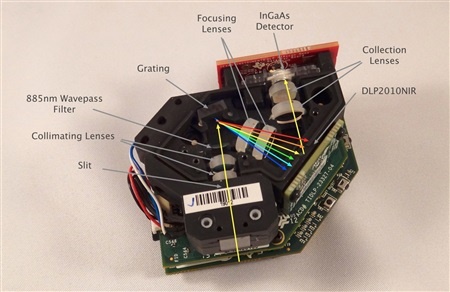
從樣本上反射回的光被采集鏡頭所搜集,并且通過輸入狹縫聚焦在光引擎上。所選擇的狹縫尺寸能夠平衡波長分辨率和分光計的信噪比(SNR)。這個分光計使用一個長寬分別為1.69毫米 x 25微米的狹縫。通過狹縫的光在第一組鏡頭上校準,通過一個885納米長的波通濾波器,然后打在一個反射光柵上。這個與聚焦透鏡組合在一起的光柵將光源色散為構成它的連續波長(多色光線)。聚焦透鏡將狹縫圖像展開在DLP2010NIR DMD上。這個狹縫圖像的不同波長水平分布在DLP2010NIR DMD上。光學系統將900納米的波長成像在DMD的一端上,將1700納米的波長成像在另一端上,而在中間按順序散開所有其它波長。
今天我們找了個借口把這個器件拆開來仔細地看了看。如需獲得與DLPNIRscan Nano EVM有關的更多信息,請參考DLP NIRscan Nano用戶指南。
編輯:jq
-
dlp
+關注
關注
6文章
380瀏覽量
61214 -
EVM
+關注
關注
3文章
866瀏覽量
41041 -
DMD
+關注
關注
3文章
55瀏覽量
30538
發布評論請先 登錄
相關推薦
DLP? LightCrafter? 雙DLPC900評估模塊(EVM)用戶指南

DLP? LightCrafter?單DLPC900評估模塊(EVM)用戶指南
DLP?顯示≥0.47英寸陣列WUXGA/1080p/WXGA/XGA/SVGA評估模塊
DLP? LightCrafter? DLPC910評估模塊(EVM)





 工商網監
工商網監
評論