") 如何用一個(gè)Hercules微控制器來(lái)驅(qū)動(dòng)GaN功率級(jí)
如何用一個(gè)Hercules微控制器來(lái)驅(qū)動(dòng)GaN功率級(jí)
今天的博文是一個(gè)動(dòng)手操作項(xiàng)目:你將用一個(gè)氮化鎵 (GaN) 功率級(jí)、一個(gè)Hercules? 微控制器和一個(gè)滾輪來(lái)調(diào)節(jié)一盞燈的亮度。我將會(huì)談到其中的硬件和固件。先給你的焊接設(shè)備充上電,我們馬上開(kāi)始。
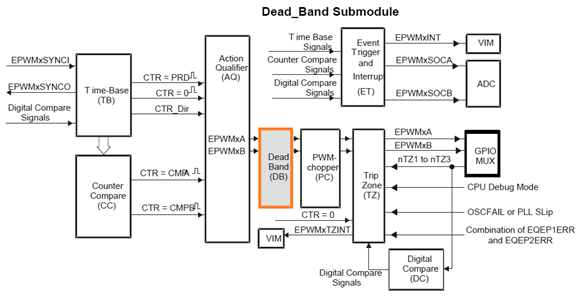
你可以用很多種方法來(lái)控制GaN功率級(jí)。針對(duì)LMG5200 GaN半橋功率級(jí)的TI用戶(hù)指南使用了一個(gè)無(wú)源組件和分立式邏輯門(mén)的組合。在這篇博文中,我將會(huì)討論到如何用一個(gè)Hercules微控制器來(lái)驅(qū)動(dòng)它。圖1顯示的是將用來(lái)驅(qū)動(dòng)LMG5200的Hercules模塊。
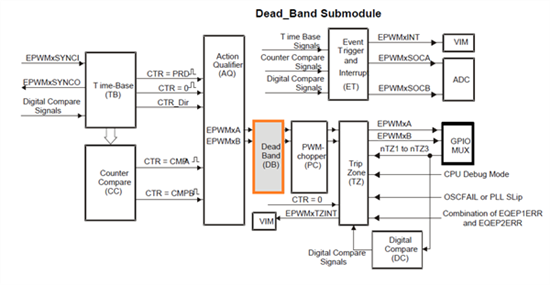
圖1:具有死區(qū)發(fā)生器的Hercules PWM模塊
GaN與Hercules功率級(jí)是天生的一對(duì)兒。它們?cè)?a target="_blank">工業(yè)和汽車(chē)應(yīng)用中都能發(fā)揮很好的作用。Hercules脈寬調(diào)制 (PWM) 模塊具有專(zhuān)門(mén)的硬件來(lái)驅(qū)動(dòng)這些信號(hào)。死區(qū)發(fā)生器 (DB) 子模塊非常適合于生成你所需要的死區(qū)時(shí)間。
設(shè)置
圖3顯示的是將連接在一起的硬件模塊。負(fù)載是一個(gè)常見(jiàn)的燈泡。一個(gè)德州儀器 (TI) LMG5200 GaN評(píng)估套件控制進(jìn)入燈泡的電力。一個(gè)舊鼠標(biāo)的滾輪作為輸入。你將用這個(gè)滾輪來(lái)控制GaN功率級(jí)輸出的上升和下降。
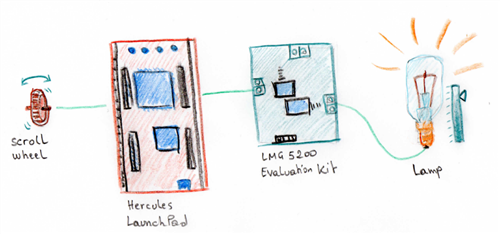
圖3:硬件設(shè)置
Hercules LaunchPad將把這些組件合并在一起。當(dāng)你旋轉(zhuǎn)滾輪時(shí),燈光會(huì)變亮或變暗。
設(shè)計(jì)
由于你有很明確的功能塊(圖4),所以很難得出一個(gè)潔凈的硬件結(jié)構(gòu)。以下是邏輯部件:具有輸入(滾輪)和輸出(GaN驅(qū)動(dòng)器)的Hercules控制器,以及功率調(diào)節(jié):具有輸入 (LaunchPad) 和輸出(燈泡)的GaN驅(qū)動(dòng)器。
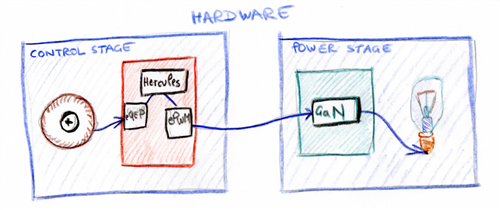
圖4:硬件模塊
對(duì)于固件來(lái)說(shuō)也是如此。一個(gè)狀態(tài)機(jī)管理功能,并且有兩個(gè)模塊:一個(gè)監(jiān)聽(tīng)滾輪的旋轉(zhuǎn)功能驅(qū)動(dòng)器模塊,以及一個(gè)與LMG5200進(jìn)行通信的GaN模塊。兩個(gè)模塊都依靠低電平Hercules外設(shè)驅(qū)動(dòng)器運(yùn)轉(zhuǎn)(圖5)。
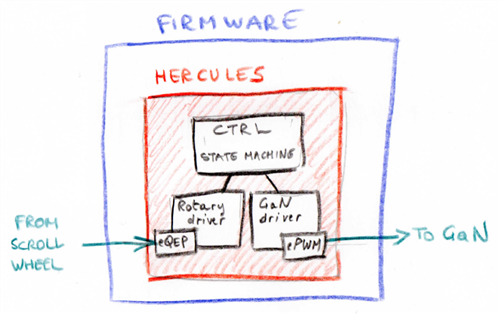
圖5:固件模塊
操作
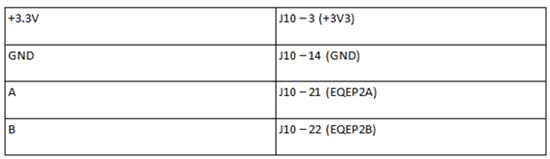
我們先來(lái)看看輸出端。第一步是在LaunchPad上生成正確的PWM信號(hào),以控制GaN驅(qū)動(dòng)器。下一步,將GaN評(píng)估套件連接至LaunchPad,在連接路徑上對(duì)PCB進(jìn)行某些更改。最后,插入輸入。將鼠標(biāo)滾輪變?yōu)榉€(wěn)定的正交編碼器,并且將這些信號(hào)集成到固件中。
正確驅(qū)動(dòng)LMG5200 GaN功率級(jí)
LMG5200 GaN半橋功率級(jí)對(duì)于其輸入信號(hào)有特別的需要。我已經(jīng)在上一篇博文中詳細(xì)介紹了這些信號(hào)。關(guān)鍵是創(chuàng)建2個(gè)相反的PWM信號(hào)。在特定點(diǎn)上還需要一個(gè)暫停。當(dāng)你的信號(hào)切換邏輯電平時(shí),你必須在調(diào)低一個(gè)與調(diào)高另外一個(gè)之間等待很短的一段時(shí)間(被稱(chēng)為死區(qū)時(shí)間)。
當(dāng)?shù)碗娖叫盘?hào)為高電平時(shí),高電平信號(hào)應(yīng)該為低電平,反之亦然。不過(guò),你必須在一個(gè)信號(hào)的下降邊緣和另外一個(gè)信號(hào)的上升邊緣之間插入一個(gè)小延遲。兩個(gè)信號(hào)將在幾納秒的時(shí)間內(nèi)均為低電平。
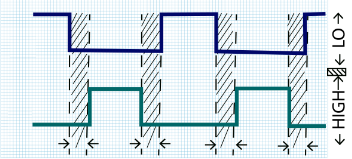
圖6:具有死區(qū)時(shí)間的LMG5200輸入信號(hào)
在圖6中,死區(qū)時(shí)間是下降和上升邊緣之間的陰影區(qū)域。讓我們將其與圖7比較一下,圖7中顯示的是所捕獲的由Hercules微控制器生成的信號(hào)。
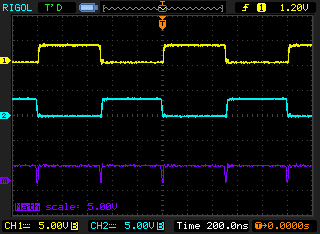
圖7:Hercules PWM和死區(qū)時(shí)間的捕獲圖
圖7中黃色和藍(lán)色的跡線(xiàn)是來(lái)自Hercules ePWM模塊的低電平和高電平信號(hào)。紫色跡線(xiàn)是經(jīng)計(jì)算得出的信號(hào)(黃色和藍(lán)色),代表的是死區(qū)時(shí)間。
示波器的SUM功能在這里會(huì)有很大幫助。你可以將其用來(lái)測(cè)量死區(qū)時(shí)間的寬度(兩個(gè)信號(hào)均為低電平時(shí)的0V電壓突降)。同樣重要的是,如果在出現(xiàn)10V峰值的同時(shí)將兩個(gè)信號(hào)意外地驅(qū)動(dòng)為高電平(這將損壞你的GaN器件),這個(gè)功能將會(huì)讓你知道這個(gè)情況。
設(shè)定PWM信號(hào)
你可以用可視化硬件配置工具,HALCoGen來(lái)配置Hercules微控制器和其模塊。啟動(dòng)激活你所需要的外設(shè),并使其參數(shù)化,然后讓HALCoGen來(lái)生成你的項(xiàng)目。你可以獲得一個(gè)包含所有源代碼的可編譯項(xiàng)目,你只需要添加兩行代碼就可以使設(shè)計(jì)運(yùn)行起來(lái)。
首先,啟用ePWM驅(qū)動(dòng)器。這是一個(gè)將生成2個(gè)信號(hào)的外設(shè);你將把生成的信號(hào)發(fā)送至GaN集成電路 (IC)。
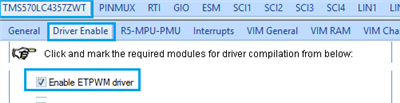
圖8:?jiǎn)⒂肞WM
下一步,激活其中一個(gè)可用PWM模塊,然后創(chuàng)建LMG5200 GaN半橋所需要的信號(hào)。
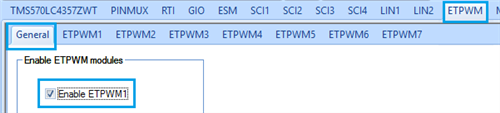
圖9:激活PWM模塊1
你可以在單個(gè)屏幕內(nèi)配置整個(gè)信號(hào),其中也包括死區(qū)時(shí)間。通過(guò)按照?qǐng)D10中所示的內(nèi)容選中復(fù)選框并設(shè)定相應(yīng)的值,你的ePWM模塊將為GaN信號(hào)的輸出做好準(zhǔn)備。
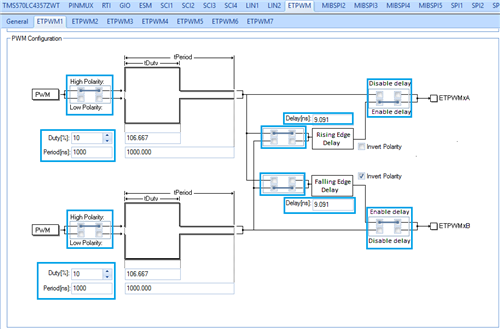
圖10:配置PWM信號(hào)和死區(qū)時(shí)間
我曾寫(xiě)過(guò)一篇博文,解釋了其中的每一個(gè)設(shè)置,以及這個(gè)配置為什么能夠?yàn)長(zhǎng)MG5200提供理想的信號(hào)。
讓HALCoGen為你生成項(xiàng)目源代碼,并且添加以下的代碼到main() 函數(shù)中:
你可以使用Code Composer Studio? 軟件來(lái)構(gòu)建和執(zhí)行這個(gè)項(xiàng)目,LaunchPad也準(zhǔn)備就緒。通過(guò)探測(cè)ePWM信號(hào),你將獲得一個(gè)與圖7中示波器捕獲內(nèi)容相類(lèi)似的圖像。占空比將為10%,頻率為1MHz。
好了,完成了。你已經(jīng)把LaunchPad直接變成了一個(gè)能夠控制GaN驅(qū)動(dòng)器的器件。在本系列的下一篇文章中,我將解釋如何連接GaN評(píng)估套件。
-
微控制器
+關(guān)注
關(guān)注
48文章
7542瀏覽量
151316 -
硬件
+關(guān)注
關(guān)注
11文章
3312瀏覽量
66200 -
GaN
+關(guān)注
關(guān)注
19文章
1933瀏覽量
73286
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
驅(qū)動(dòng)LMG5200的Hercules模塊設(shè)計(jì)
用一個(gè)Hercules? LaunchPad? 開(kāi)發(fā)套件控制GaN功率級(jí)—第2部分
用Hercules? LaunchPad? 開(kāi)發(fā)套件控制GaN功率級(jí)—第1部分
正確驅(qū)動(dòng)LMG5200 GaN功率級(jí)的步驟
用 Hercules 開(kāi)發(fā)套件來(lái)控制 GaN 功率級(jí)——第 2 部分

用 Hercules 開(kāi)發(fā)套件來(lái)控制 GaN 功率級(jí)——第 1 部分

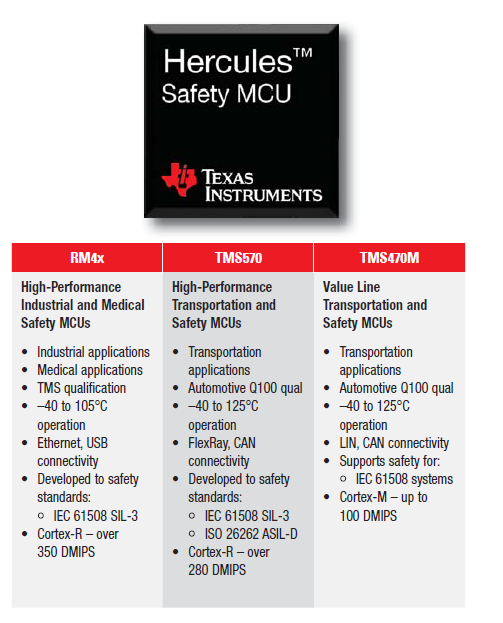
Hercules安全微控制器的3種類(lèi)型產(chǎn)品的介紹應(yīng)用評(píng)估概述(中文資料)

Hercules安全微控制器的3種類(lèi)型產(chǎn)品的介紹應(yīng)用評(píng)估概述(英文原資料)
用一個(gè)Hercules LaunchPad開(kāi)發(fā)套件控制GaN功率級(jí)2
用一個(gè)Hercules? LaunchPad? 開(kāi)發(fā)套件控制GaN功率級(jí)—第2部分

用Hercules? LaunchPad? 開(kāi)發(fā)套件控制GaN功率級(jí)—第1部分
如何設(shè)置、設(shè)計(jì)及正確地驅(qū)動(dòng)GaN功率級(jí)
用于Hercules微控制器的CAN總線(xiàn)引導(dǎo)加載程序
用于Hercules微控制器的CAN總線(xiàn)引導(dǎo)加載程序





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論