") MCU電機高轉速與精密位置控制新風向:雙電機控制
MCU電機高轉速與精密位置控制新風向:雙電機控制
在由電子發(fā)燒友主辦的2021秋季電機控制先進技術研討會上,眾多BLDC驅控芯片廠商分享了他們在BLDC上的應用新玩法。筆者在大會上見識了很多新的電機控制組合,比如今年熱度很高的“一拖三”電機控制,雙電機控制平臺,強隔離驅控等等。
在眾多的玩法里,今天來看一看雙電機平臺應用。電機控制的本質是控制轉速和扭矩,雙電機控制要么是轉速同步控制要么是扭矩同步控制。雙電機控制的價值在于兩個電機的功率和一定要小于單電機最大功率,這樣才有實際使用價值,否則怎么算成本都是虧的。另外則是在雙電機控制下有更精準的位置控制,這在工業(yè)應用,移動機器人應用中有很大的用武之地。在和這些MCU廠商交談時,他們的雙電機應用主戰(zhàn)場都不約而同指向了工業(yè)設備與機器人領域。
交叉耦合控制、偏差耦合控制、虛擬主軸控制等等這些電耦合控制在雙電機同步控制中都各有利弊,各廠商也都采用的不同的方案。比如交叉耦合控制在同步能力和抗干擾能力上很強,但是需要FOC彌補耦合弊端。不管采用什么控制,大到工業(yè)機器人,小到服務機器人都需要電機精準位置控制。雙電機控制無疑會為此類應用帶來更好的驅控。
基于STM32F415ZGT6和STM32F303CC的雙電機控制
簡單來說,雙電機控制的優(yōu)勢在于僅用一顆MCU就能控制所有電機。ST在大會上這套方案是基于STM32G4/STSPIN32G4來做的。在此套方案之前,ST也推出過基于M4核的STM32F415ZGT6和STM32F303CC的雙電機控制。
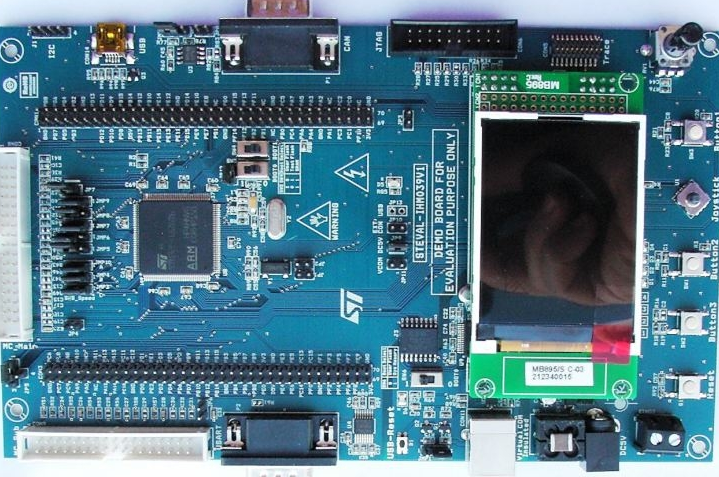
(STM32F415ZGT6雙電機控制板,ST)
基于STM32F415ZGT6的STEVAL-IHM039V1雙電機控制板已經(jīng)可以進行雙FOC控制,雖然在運控上這個板并沒有太多讓人眼前一亮的地方。相比之下,同是早前推出,基于STM32F303CC的 STEVAL-IHM042V1雙電機控制板則更有聊頭。
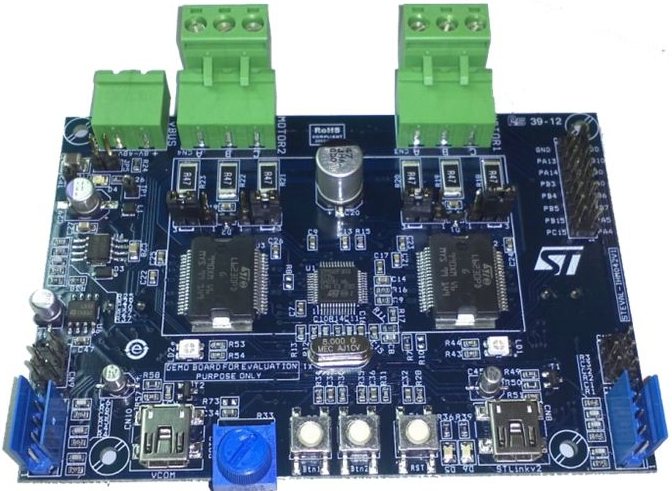
(STM32F303CC雙電機控制板,ST)
這個板子為MCU提供了浮點計算支持并集成了兩個DMOS L6230三相電機驅動。STM32F303CC MCU具有48 KB內部SRAM、256 KB閃存、4個ADC、2個DAC、7個比較器和4個可編程增益運算放大器。內置的L6230 DMOS驅動器可以輸出2.8 A的峰值電流。在安全性上這個平臺也有保障,非耗散過電流檢測、交叉?zhèn)鲗ПWo、熱關斷和欠壓鎖定這些都是標配。
ST工業(yè)和機器人應用的雙電機平臺--基于STM32G4/STSPIN32G4
相比于上述兩個系列,基于STM32G4/STSPIN32G4的雙電機控制在兩個單獨控制器之間不需要通信總線,也會擁有更好的同步性能。尤其是基于SPIN系列的設計會擁有更緊湊的PCB尺寸,在集成度上會做的更高。得益于PCB尺寸減小,無源外部器件數(shù)量也減至更少,在成本上算回了一筆賬。
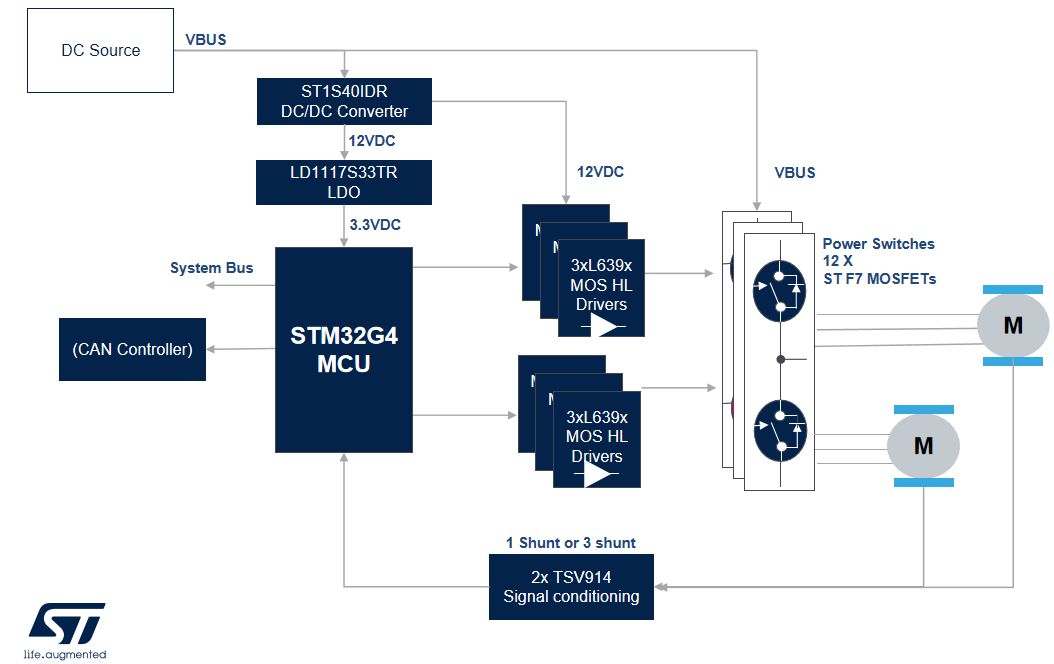
(基于STM32G4/STSPIN32G4的工業(yè)和機器人應用雙電機平臺,ST)
MCU加上驅動再加上電源管理,這種高集成度帶來的尺寸上的減少大概在6成。最多低至15μA的最低消耗解決了用戶對于低功耗的硬性要求。它可以支持FOC以及有感控制,并選擇了磁編碼器來提供準確的位置控制。為了使該控制平臺能實現(xiàn)更精準的位置控制以契合工業(yè)和機器人應用,該平臺另外集成了IMU進行運動數(shù)據(jù)采集以及對飛行時間數(shù)據(jù)采集。
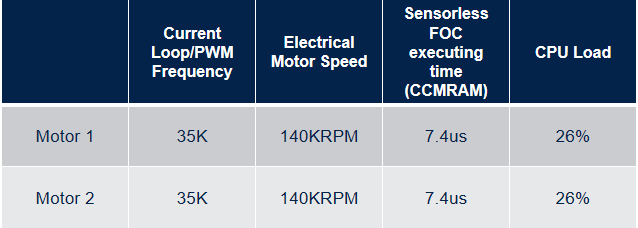
(性能評估,ST)
在ST給出的性能評估中,即使在運行基于無傳感器FOC的雙高速電機控制時,CPU仍然具有50%左右的CPU資源去處理其他任務。轉速和響應時間這些基礎指標展現(xiàn)出的高性能也能從上表中看出。
寫在最后
不少國內廠商也推出了雙電機方案。雖然目前國內廠商沒有將這種方案單獨推出來,但從大會展示的產品上看得出國產廠商的雙電機方案也都在轉速,位置控制上下足了功夫。這種雙電機方案,得益于比起同類驅控更精的位置控制,在工業(yè)和機器人高端應用中預計會有相當大的市場。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
mcu
+關注
關注
146文章
17123瀏覽量
350996 -
電機控制
+關注
關注
3534文章
1876瀏覽量
268751 -
BLDC
+關注
關注
206文章
800瀏覽量
96870
發(fā)布評論請先 登錄
相關推薦
伺服電機原理及控制應用
伺服電機(Servo Motor)是一種高精度、高性能的電動機系統(tǒng),廣泛應用于需要精確控制位置、速度和加速度的場合。 一、伺服電機的工作原理 伺服電
步進電機轉速怎么控制高低
步進電機是一種將電脈沖信號轉換為角位移或線位移的開環(huán)控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受
基于小華半導體MCU電機控制開源平臺
參考原理圖二,本系統(tǒng)是基于無位置傳感器的矢量控制系統(tǒng),適用于表貼式(SPMSM)和凸極式(IPMSM)的永磁同步電機。系統(tǒng)的主要特征有:1. 支持恒轉速
發(fā)表于 10-12 16:52
?1次下載
伺服電機轉速調整方法
引言 伺服電機是一種將電能轉換為機械能的裝置,具有高精度、高響應速度、高穩(wěn)定性等特點。在工業(yè)自動化、機器人、航空航天等領域,伺服電機被廣泛應用于實現(xiàn)精確的位置、速度和力控制。伺服
伺服電機轉速一般多少?最高轉速能達到多少?
和最大速度。低慣量伺服電機的額定值一般為3000,最大值為5000。中高慣量伺服電動機的額定值通常1500,1000,最好是2000或1500。總之,高轉矩的最大轉速將非常低。伺服電機轉速
雙極性步進電機的結構與控制模式
在現(xiàn)代工業(yè)控制領域,步進電機以其獨特的步進特性和精確的位置控制而備受青睞。其中,雙極性步進電機作
什么是雙極性步進電機?它有哪些特點?
在現(xiàn)代工業(yè)、自動化控制以及精密儀器等領域中,步進電機因其獨特的步進特性和精確的位置控制而得到廣泛應用。其中,
直流電機怎么提高轉速
直流電機,作為現(xiàn)代工業(yè)中不可或缺的驅動裝置,其轉速的調節(jié)對于實現(xiàn)高效、精確的機械運動至關重要。本文將深入探討直流電機提高轉速的方法,通過分點表示和歸納,結合具體的數(shù)據(jù)和信息,以期為讀者
電機控制器mcu的作用 電機控制器mcu的功用是什么
(Microcontroller Unit,簡稱MCU),它負責處理輸入信號、執(zhí)行控制算法以及輸出控制指令。本文將詳細介紹電機控制器
PWM控制電機轉速的原理與實現(xiàn)
PWM(脈寬調制)是一種廣泛應用于電機控制領域的調制技術。它通過調節(jié)脈沖信號的占空比,實現(xiàn)對電機轉速的精確控制。PWM
電機轉速調高后出現(xiàn)over current問題怎么解決?
請教網(wǎng)友:
電機低轉速運行正常,但是當轉速調高后出現(xiàn)over current問題?可能是什么原因呢?
示波器是uvw的控制pwm輸出。調試了好多參數(shù)組合都不能滿足提
發(fā)表于 04-24 06:05
使用特勵達力科MDA8000HD電機分析儀測試電機的轉速、角度和位置
采用復雜控制系統(tǒng)(例如矢量場定向控制或FOC)的電機驅動器通常使用旋轉變壓器接口來向控制系統(tǒng)提供信號以計算電機
伺服電機的三種控制方式 如何確定選擇伺服電機控制方式?
伺服電機的三種控制方式 如何確定選擇伺服電機控制方式? 伺服電機是一種能夠根據(jù)輸入信號實時調整轉速





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論