 蜂鳴器常見錯誤電路分析及改進方案
蜂鳴器常見錯誤電路分析及改進方案
Part1摘要
蜂鳴器是電路設計中常用的器件,廣泛用于工業控制報警、機房監控、門禁控制、計算機 等電子產品作預警發聲器件,驅動電路也非常簡單,然而很多人在設計時往往隨意設計,導 致實際電路中蜂鳴器不發聲、輕微發聲和亂發聲的情況發生。
下面就 3.3V NPN 三極管驅動有源蜂鳴器設計,從實際產品中分析電路設計存在的問題,提出電路的改進方案,使讀者能從小小的蜂鳴器電路中學會分析和改進電路的方法,從而設計出更優秀的產品,達到拋磚引玉的效果。
Part2常見錯誤接法
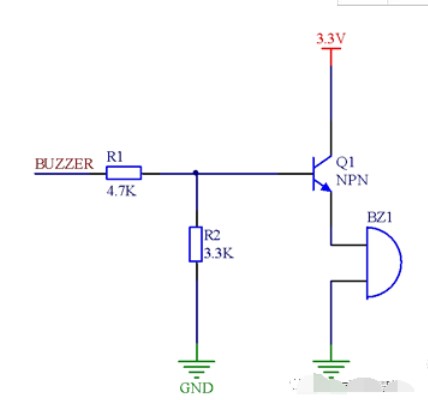
圖1 為典型的錯誤接法,當 BUZZER 端輸入高電平時蜂鳴器不響或響聲太小。當 I/O 口為高電平時,基極電壓為 3.3/4.7*3.3V≈2.3V,由于三極管的壓降 0.6~0.7V,則三極管射 極電壓為 2.3-0.7=1.6V,驅動電壓太低導致蜂鳴器無法驅動或者響聲很小。
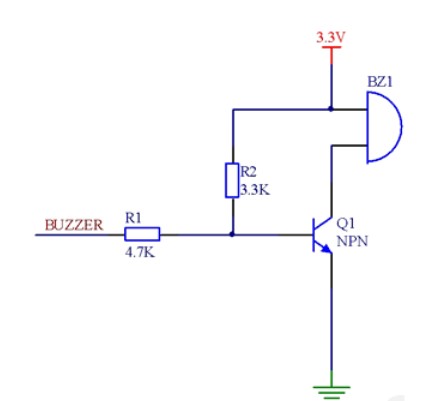
圖2 錯誤接法2
圖2 為第二種典型的錯誤接法,由于上拉電阻R2,BUZZER 端在輸出低電平時,由于 電阻R1和R2的分壓作用,三極管不能可靠關斷。
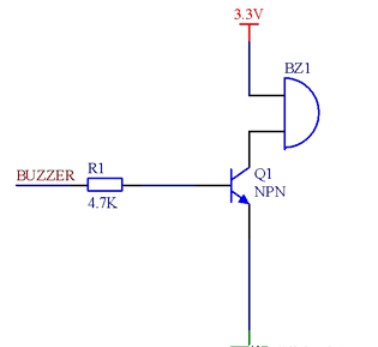
圖3 為第三種錯誤接法,三極管的高電平門檻電壓就只有 0.7V,即在 BUZZER 端輸入 壓只要超過0.7V就有可能使三極管導通,顯然0.7V的門檻電壓對于數字電路來說太低了, 電磁干擾的環境下,很容易造成蜂鳴器鳴叫。
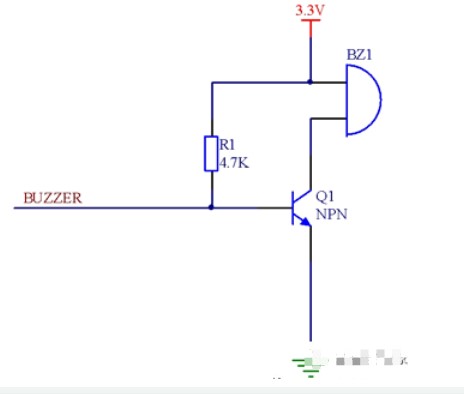
圖 4 為第四種錯誤接法,當CPU的GPIO管腳存在內部下拉時,由于 I/O 口存在輸入阻抗,也可能導致三極管不能可靠關斷,而且和圖3一樣BUZZER端輸入電壓只要超過0.7V就有可能使三極管導通。
以上幾種用法我覺得也不能說是完全不行,對于器件的各種參數要求會比較局限,不利于器件選型,抗干擾性能也比較差。
Part3NPN 三極管控制有源蜂鳴器常規設計
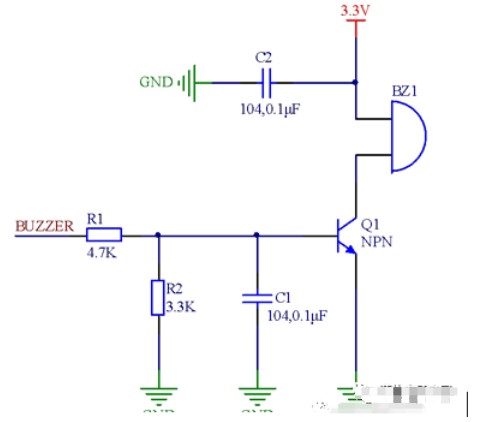
圖 5 為通用有源蜂鳴器的驅動電路。電阻R1為限流電阻,防止流過基極電流過大損壞三極管。電阻R2有著重要的作用,第一個作用:R2 相當于基極的下拉電阻。如果A端被懸空則由于R2的存在能夠使三極管保持在可靠的關斷狀態,如果刪除R2則當BUZZER輸入端懸空時則易受到干擾而可能導致三極管狀態發生意外翻轉或進入不期望的放大狀態,造成蜂鳴器意外發聲。第二個作用:R2可提升高電平的門檻電壓。如果刪除R2,則三極管的高電平門檻電壓就只有0.7V,即A端輸入電壓只要超過0.7V 就有可能導通,添加R2的情況就不同了,當從A端輸入電壓達到約2.2V 時三極管才會飽和導通,具體計算過程如下:
假定β =120為晶體管參數的最小值,蜂鳴器導通電流是15mA。那么集電極電流IC=15mA。則三極管剛剛達到飽和導通時的基極電流是 IB=15mA/120=0.125mA。流經R2的電流是0.7V/3.3k?=0.212mA,流經R1的電流 IR1=0.212mA +0.125mA=0.337 mA。最后算出BUZZER端的門檻電壓是0.7V+0.337mA× 4.7k?=2.2839V≈2.3V。
圖中的C2為電源濾波電容,濾除電源高頻雜波。C1可以在有強干擾環境下,有效的濾除干擾信號,避免蜂鳴器變音和意外發聲,在 RFID射頻通訊、Mifare卡的應用時,這里初步選用0.1uF 的電容,具體可以根據實際情況選擇。
Part4改進方案
蜂鳴器竟然有EMI 輻射?!在 NPN 3.3V 控制有源蜂鳴器時,在電路的 BUZZER 輸入 高電平,讓蜂鳴器鳴叫,檢測蜂鳴器輸入管腳(NPN 三極管的C極處信號,發現蜂鳴器在發聲時,向外發生1.87KHz,-2.91V 的脈沖信號,如圖 6 所示。
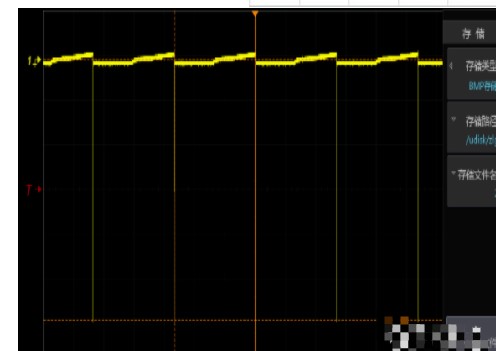
圖 6 蜂鳴器自身發放脈沖
在電路的BUZZER 輸入20Hz的脈沖信號,讓蜂鳴器鳴叫,檢測蜂鳴器輸入管腳處信號,發現蜂鳴器在發聲時,在控制電平上疊加了1.87KHz,-2.92V 的脈沖信號,并且在蜂鳴器關斷時出現正向尖峰脈沖(≥10V),如圖7所示。
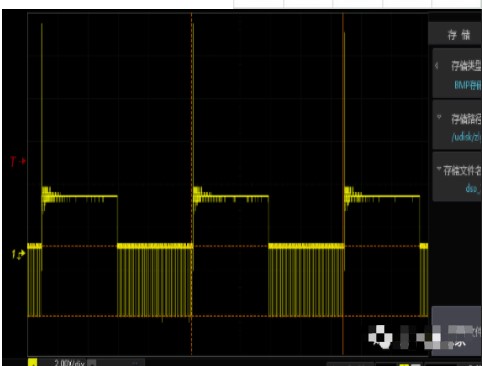
圖7中1.87KHz,-2.92V 的脈沖信號應該是有源蜂鳴器內部震蕩源釋放出來的信號。常用有源蜂鳴器主要分為壓電式、 電磁震蕩式兩種, iMX283 開發板上用的是壓電式蜂鳴器,壓電式蜂鳴器主要由多諧振蕩器、壓電蜂鳴片、阻抗匹配器及共鳴箱、外殼等組成,而多諧震蕩器由晶體管或集成電路構成,我們所用的蜂鳴器內部含有晶體管震蕩電路(有興趣的朋友可以自己拆開看看)。
有源蜂鳴器產生脈沖信號能量不是很強,可以考慮增加濾波電容將脈沖信號濾除。在有源蜂鳴器的兩端添加一個104的濾波電容,脈沖信號削減到-110mV,如圖 8 所示,但頂部信號由于電容充電過慢,有點延時。
圖 8 減少蜂鳴器自身發放脈沖
消除蜂鳴器EMI輻射后改進電路圖如圖9所示:
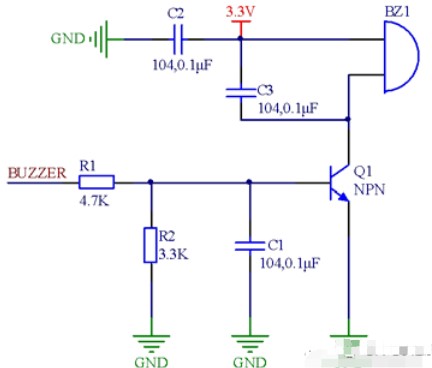
圖 9 NPN 有源蜂鳴器控制電路改善后電路圖
Part5兼容性設計
作為標準電路,需要考慮電路的兼容性問題,比如同樣耐壓不同功率的有源蜂鳴器,有 源蜂鳴器和無源蜂鳴器的兼容性問題。
1兼容同樣耐壓不同功率的有源蜂鳴器電路設計
為了電路的兼容性和可擴展性,電路需要考慮兼容不同廠家和不同功率的蜂鳴器。同一 個耐壓的蜂鳴器主要是蜂鳴器的內阻和工作電流不一樣,一般 3V~5V 耐壓的蜂鳴器,不同功率的蜂鳴器導通電流是 10mA~80mA。我們按照最大功率的蜂鳴器去設計電路即可,即三極管的推動電流按照 80 mA 設計。
假定:β=120 為晶體管參數的最小值,蜂鳴器導通電流是 80 mA。那么集電極電流 IC =80 mA。則三極管剛剛達到飽和導通時的基極電流 IB=80mA/ 120=0.667mA。流經 R2的電流是 0.7V/ 3.3k?= 0.212mA,所以流經 R1 的電流應該是 IR1=0.667mA +0.125mA=0.792mA。BUZZER 端的門檻電壓是設定在 2.2V,那么 R1=(2.2V-0.7V)/ 0.792mA=1.89K。電阻取常規 2K 即可。
如果電路更換功率稍大一點的有源蜂鳴器,可以按照上面的計算方法計算 R1 的大小。
2兼容有源蜂鳴器和無源蜂鳴器電路設計
在電路的設計過程中,往往會碰到需求變更,比如項目前期,對蜂鳴器的發聲頻率沒有 要求,但后期有要求,需要更換為無源蜂鳴器,這時就需要修改電路圖,甚至修改 PCB, 這樣就增加了改動成本、周期和風險。
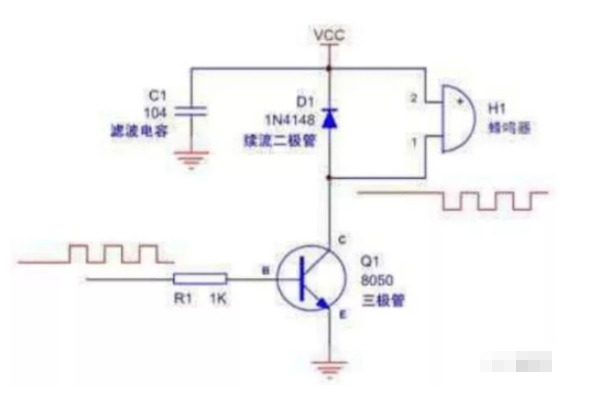
有源蜂鳴器和無源蜂鳴器的驅動電路區別主要在于無源蜂鳴器本質上是一個感性元件, 其電流不能瞬變,因此必須有一個續流二極管提供續流。否則,在蜂鳴器兩端會有反向感應 電動勢,產生幾十伏的尖峰電壓,可能損壞驅動三極管,并干擾整個電路系統的其它部分。而如果電路中工作電壓較大,要使用耐壓值較大的二極管,而如果電路工作頻率高,則要選 用高速的二極管。這里選擇的是 IN4148 的開關二極管。電路如圖 10 所示。
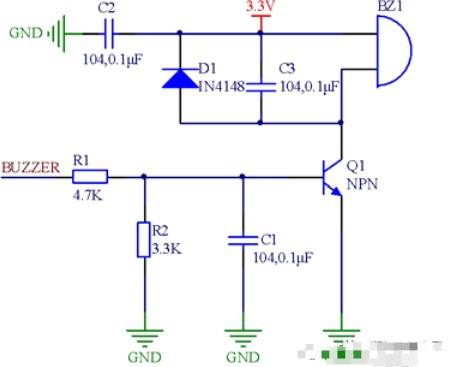
圖 10 NPN 無源蜂鳴器控制電路
原文標題:小小蜂鳴器,驅動電路可大有學問
文章出處:【微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
電阻
+關注
關注
86文章
5509瀏覽量
171936 -
驅動電路
+關注
關注
153文章
1529瀏覽量
108494 -
蜂鳴器
+關注
關注
12文章
891瀏覽量
45921
原文標題:小小蜂鳴器,驅動電路可大有學問
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
EEPROM編程常見錯誤及解決方案
常見的GND連接錯誤及解決方案
SQL錯誤代碼及解決方案
aes加密的常見錯誤及解決方案
socket 常見錯誤與解決方案
SUMIF函數常見錯誤及解決方案
pcb板設計中的常見錯誤
蜂鳴器電路電阻的作用是什么
buzzer蜂鳴器在Multisim的使用
無源蜂鳴器和有源蜂鳴器的對比分析
無源蜂鳴器怎么才會響 蜂鳴器驅動電路原理圖
PCB線路板制造中常見的錯誤有哪些,如何避免?
PCB設計工作中常見的錯誤有哪些?





 工商網監
工商網監
評論