


1、unified2020.1
linux ubuntu18.04.2
推薦文檔鏈接:
https://xilinx.github.io/Vitis_Libraries/vision/2020.1/overview.html#hls...
https://forums.xilinx.com/t5/High-Level-Synthesis-HLS/Using-Vitis-Vision...
https://github.com/Xilinx/Vitis_Libraries
Vitis Vision庫是OpenCV和Vision功能的加速庫,可在Vitis環境中使用,這些庫的L1目錄是示例設計。為了適應各種用戶環境,從2020.1版本開始,Xilinx不再使用Vivado / Vitis工具提供預安裝的OpenCV版本。盡管Vitis_hls編譯Vision庫不需要OpenCV,但是用戶測試驗證使用時OpenCV。
2、linux下安裝opencv(opencv-3.4.12)
鏈接:https://opencv.org/releases/
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev libjpeg.dev libtiff4.dev
unzip opencv-3.4.12.zip
cd opencv-3.4.12
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DOPENCV_GENERATE_PKGCONFIG=ON -DCMAKE_INSTALL_PREFIX=/usr/local …
make -j8
sudo make install
ldconfig -p |grep opencv
sudo ldconfig -v
qt中測試,報錯 failed to load module “canberra-gtk-module”
sudo apt-get install libcanberra-gtk-module
3、在vitis library中 每個類別提供三種代碼
L1:最低級的代碼,旨在用高級綜合工具綜合后,可以在Vitis(邏輯)中實現這些功能,或將其用作新IP開發的一部分。
L2:中間級可以在Vitis中實現功能(邏輯)。不太懂也不關心!
L3:最高級提供了由多個加速內核創建的應用程序。不太懂也不關心!
4、在linux系統中測試
(1)復制L1/examples中的sobelfilter
(2)將build文件復制到文件夾(xf_config_params.h)這個文件存放的是濾波器的參數
(3)在data中輔助一個128x128的png圖像
(4)配置hls運行前的環境
source /settings64.sh
export OPENCV_INCLUDE=
export OPENCV_LIB=
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:
(5)在此終端打開vitis_hls
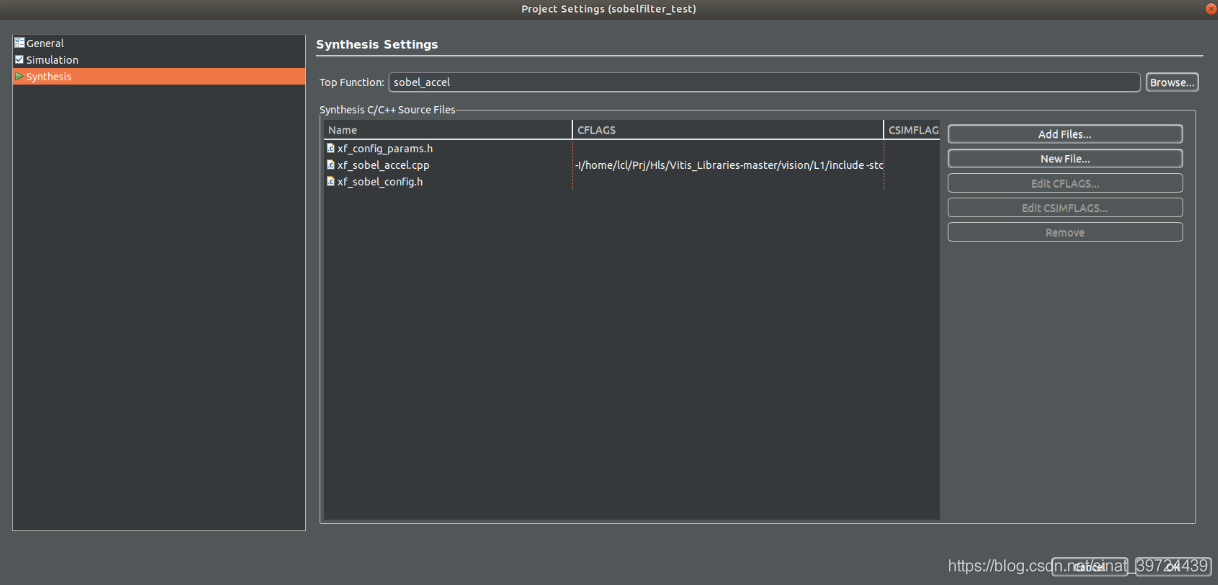
(6)新建hls工程
(7)添加源文件中所需的.cpp 和.h 并且在cflags中添加
-I
-std=c++0x(其他調用的.h文件的路徑,否則將頭文件復制到一個文件夾)
(8)在tb的cflags中添加
-I
-std=c++0x -I
(其他調用的.h文件的路徑,否則將頭文件復制到一個文件夾)
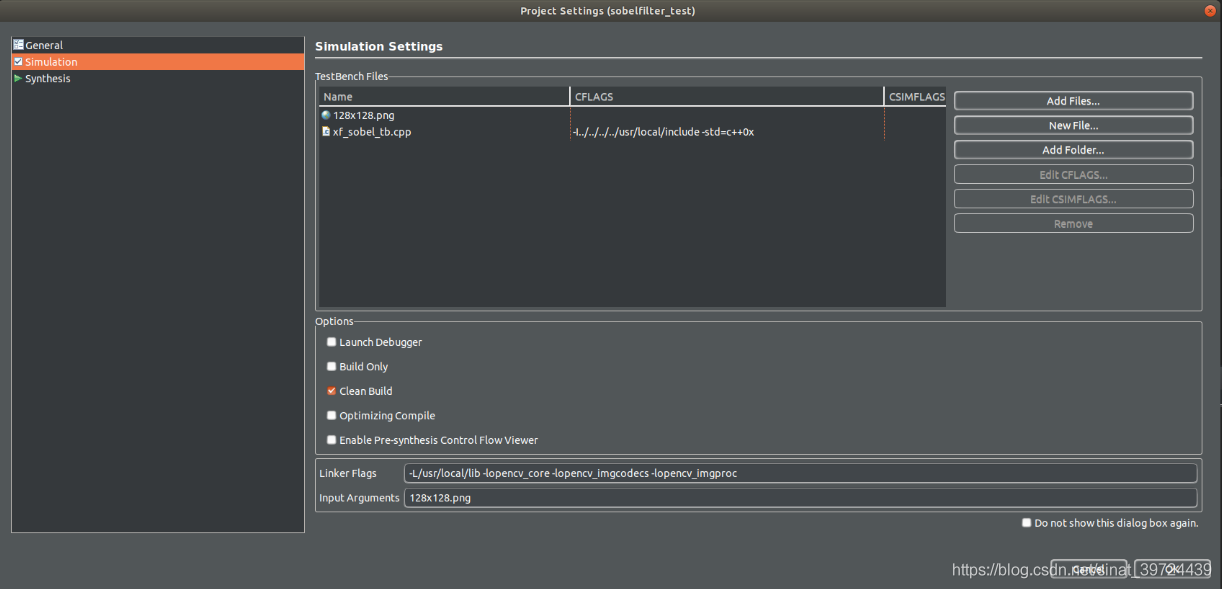
(9)在連接器 (linker flags)中添加
-L
-lopencv_core -lopencv_imgcodecs -lopencv_imgproc
(10)在輸入(input arguments)中輸入圖片名稱
(11)保存
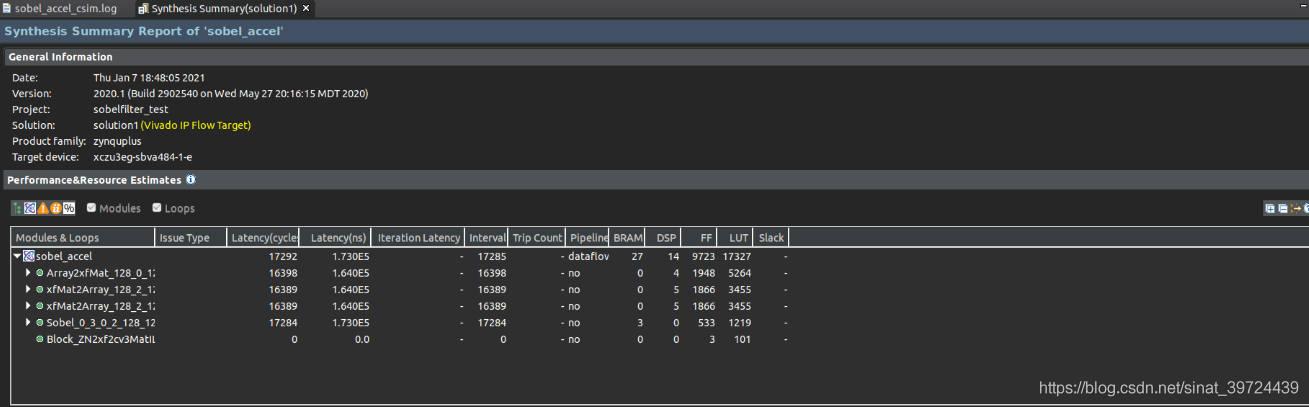
5、點擊綜合
6、點擊仿真
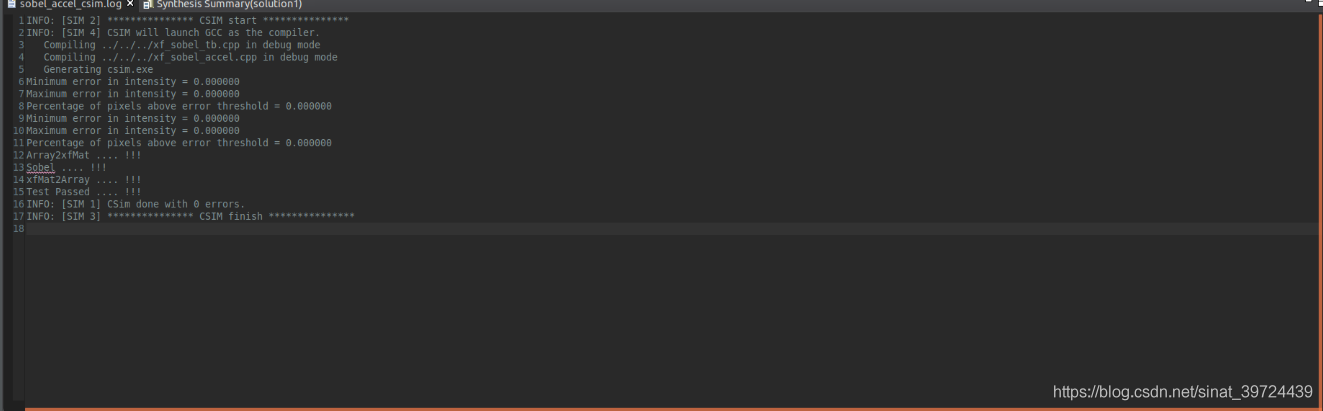
7、實驗現象
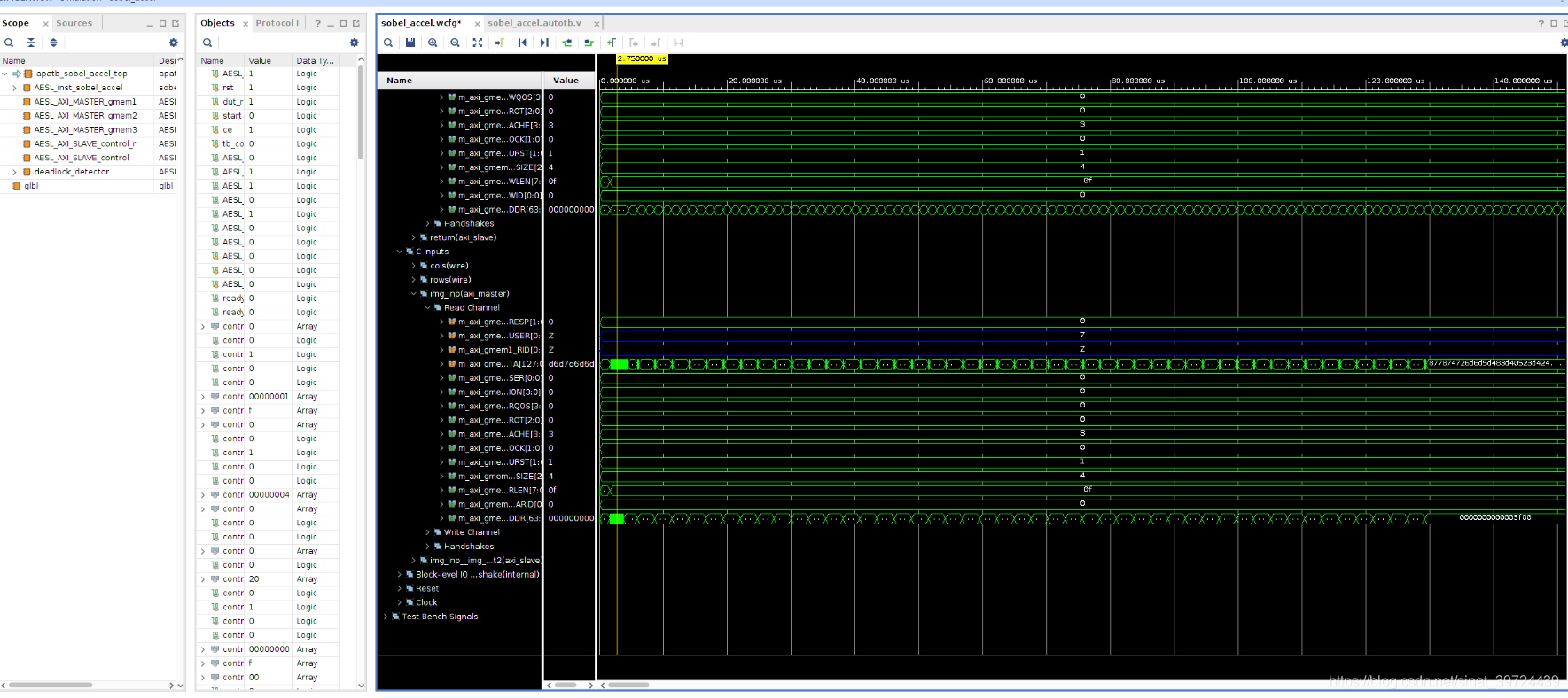
8、協同仿真

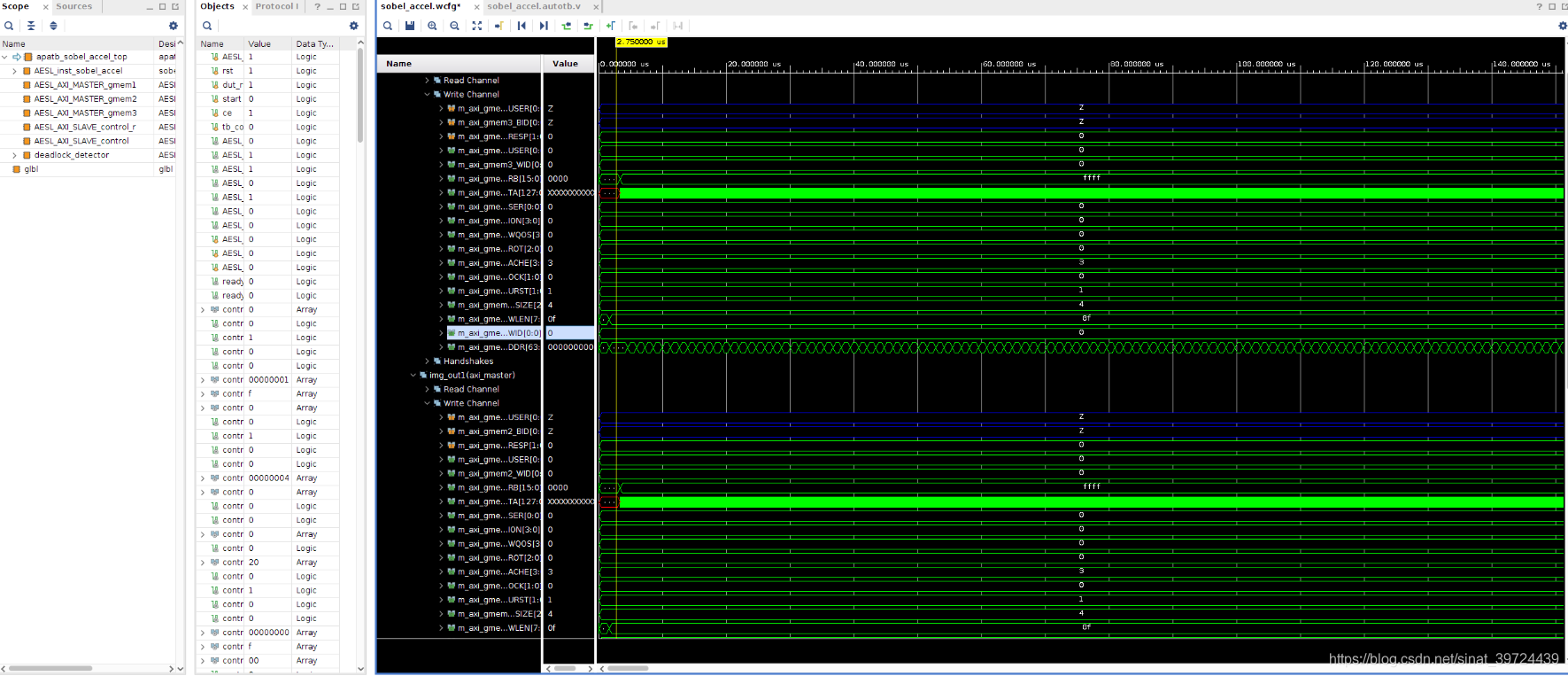
9、信號太多,挑模塊的輸入輸出即可,否則除非內存很大,不然會卡死。
輸入數據
輸出數據
審核編輯:符乾江
-
圖像處理
+關注
關注
27文章
1328瀏覽量
58106 -
Vitis
+關注
關注
0文章
150瀏覽量
7959
發布評論請先 登錄
如何在Unified IDE中創建視覺庫HLS組件

使用AMD Vitis Unified IDE創建HLS組件
如何使用AMD Vitis HLS創建HLS IP

Vivado HLS設計流程

圖像采集卡:現代圖像處理技術的關鍵組件

FPGA圖像處理基礎----實現緩存卷積窗口

使用HLS流程設計和驗證圖像信號處理設備

使用AMD Vitis進行嵌入式設計開發用戶指南

基于FPGA實現圖像直方圖設計






 工商網監
工商網監

評論