
") 基于STM32實現(xiàn)簡單的CAN通訊過程
基于STM32實現(xiàn)簡單的CAN通訊過程
CAN通訊在車輛工程中用的非常廣泛,本文將基于stm32實現(xiàn)簡單的can通訊過程。
首先了解一下CAN通訊的主要特點:
1、 數(shù)據(jù)通信沒有主從之分,任意一個節(jié)點可以向任何其他(一個或多個)節(jié)點發(fā)起數(shù)據(jù)通信,靠各個節(jié)點信息優(yōu)先級先后順序來決定通信次序。
2、 支持時間觸發(fā)通信功能, 發(fā)送報文的優(yōu)先級可軟件配置。多個節(jié)點同時發(fā)起通信時,優(yōu)先級低的避讓優(yōu)先級高的,不會對通信線路造成擁塞。
3、 CAN 是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信距離最遠可達10KM(速率低于5Kbps),速率可達到1Mbps(通信距離小于40M)。
4、 CAN 總線采用了多主競爭式總線結構,具有多主站運行和分散仲裁的串行總線以及廣播通信的特點。
5、 FIFO(First Input First Output),即先進先出隊列,溢出處理方式可配置
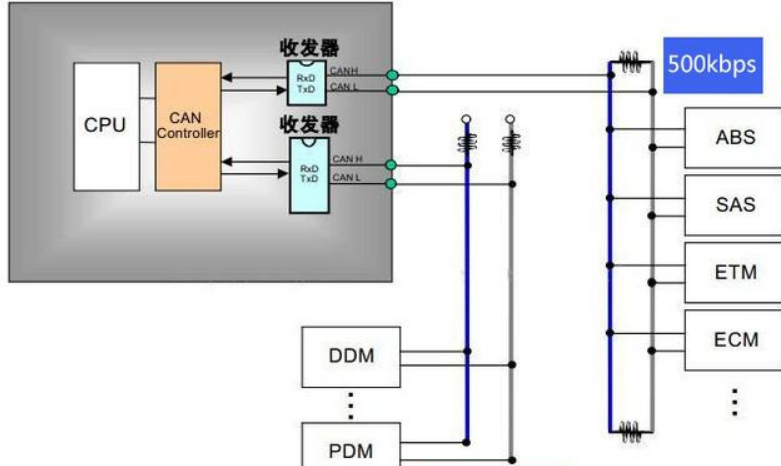 can通訊拓撲結構
can通訊拓撲結構下面我們將根據(jù)stm32 嵌入式系統(tǒng)
話不多說,直接上代碼:
can.h代碼如下:
#ifndef __CAN_H
#define __CAN_H
#include "sys.h"
//CAN接收RX0中斷使能
#define CAN_RX0_INT_ENABLE 1 //0,不使能;1,使能.
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode);//CAN初始化
u8 Can_Send_Msg(u8* msg,u8 len); //發(fā)送數(shù)據(jù)
u8 Can_Receive_Msg(u8 *buf); //接收數(shù)據(jù)
#endifcan.c代碼如下:
#include "can.h"
#include "led.h"
#include "delay.h"
#include "usart.h"
//CAN初始化
//tsjw:重新同步跳躍時間單元.范圍:CAN_SJW_1tq~ CAN_SJW_4tq
//tbs2:時間段2的時間單元. 范圍:CAN_BS2_1tq~CAN_BS2_8tq;
//tbs1:時間段1的時間單元. 范圍:CAN_BS1_1tq ~CAN_BS1_16tq
//brp :波特率分頻器.范圍:1~1024; tq=(brp)*tpclk1
//波特率=Fpclk1/((tbs1+1+tbs2+1+1)*brp);
//mode:CAN_Mode_Normal,普通模式;CAN_Mode_LoopBack,回環(huán)模式;
//Fpclk1的時鐘在初始化的時候設置為36M,如果設置CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,CAN_Mode_LoopBack);
//則波特率為:36M/((8+9+1)*4)=500Kbps
//返回值:0,初始化OK;
// 其他,初始化失敗;
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
#if CAN_RX0_INT_ENABLE
NVIC_InitTypeDef NVIC_InitStructure;
#endif
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PORTA時鐘
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉輸入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
//CAN單元設置
CAN_InitStructure.CAN_TTCM=DISABLE; //非時間觸發(fā)通信模式
CAN_InitStructure.CAN_ABOM=DISABLE; //軟件自動離線管理
CAN_InitStructure.CAN_AWUM=DISABLE; //睡眠模式通過軟件喚醒(清除CAN->MCR的SLEEP位)
CAN_InitStructure.CAN_NART=ENABLE; //禁止報文自動傳送
CAN_InitStructure.CAN_RFLM=DISABLE; //報文不鎖定,新的覆蓋舊的
CAN_InitStructure.CAN_TXFP=DISABLE; //優(yōu)先級由報文標識符決定
CAN_InitStructure.CAN_Mode= mode; //模式設置: mode:0,普通模式;1,回環(huán)模式;
//設置波特率
CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳躍寬度(Tsjw)為tsjw+1個時間單位 CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1個時間單位CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2; //Tbs2=tbs2+1個時間單位CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //分頻系數(shù)(Fdiv)為brp+1
CAN_Init(CAN1, &CAN_InitStructure); //初始化CAN1
CAN_FilterInitStructure.CAN_FilterNumber=0; //過濾器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //屏蔽位模式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位寬
CAN_FilterInitStructure.CAN_FilterIdHigh=0x18F1; //32位ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//過濾器0關聯(lián)到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;//激活過濾器0
CAN_FilterInit(&CAN_FilterInitStructure); //濾波器初始化
#if CAN_RX0_INT_ENABLE
CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE); //FIFO0消息掛號中斷允許.
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 主優(yōu)先級為1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 次優(yōu)先級為0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
return 0;
}
#if CAN_RX0_INT_ENABLE //使能RX0中斷
//中斷服務函數(shù)
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
int i=0;
CAN_Receive(CAN1, 0, &RxMessage);
for(i=0;i<8;i++)
printf("rxbuf[%d]:%d\r\n",i,RxMessage.Data[i]);
}
#endif
//can發(fā)送一組數(shù)據(jù)(固定格式:ID為0X12,標準幀,數(shù)據(jù)幀)
//len:數(shù)據(jù)長度(最大為8)
//msg:數(shù)據(jù)指針,最大為8個字節(jié).
//返回值:0,成功;
// 其他,失敗;
u8 Can_Send_Msg(u8* msg,u8 len)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=0x123; // 標準標識符
TxMessage.ExtId=0x18f10155; // 設置擴展標示符 ID
TxMessage.IDE=CAN_Id_Extended; // 擴展幀CAN_Id_Extended 標準幀CAN_Id_Standard
TxMessage.RTR=CAN_RTR_Data; // 數(shù)據(jù)幀
TxMessage.DLC=len; // 要發(fā)送的數(shù)據(jù)長度
for(i=0;i=0XFFF)return 1;
return 0;
}
//can口接收數(shù)據(jù)查詢
//buf:數(shù)據(jù)緩存區(qū);
//返回值:0,無數(shù)據(jù)被收到;
// 其他,接收的數(shù)據(jù)長度;
u8 Can_Receive_Msg(u8 *buf)
{
u32 i;
CanRxMsg RxMessage;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //沒有接收到數(shù)據(jù),直接退出
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//讀取數(shù)據(jù)
for(i=0;i<8;i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC;
};i++)>
所用的函數(shù)為標準庫函數(shù),需要更換引腳需要根據(jù)相關的芯片手冊進行配置相關的引腳,這里也不做贅述,后面會講到如何根據(jù)數(shù)據(jù)手冊看芯片資料。只要配置好這兩個函數(shù)就可以完成數(shù)據(jù)發(fā)送和接收。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
CAN
+關注
關注
57文章
2884瀏覽量
466680 -
通訊
+關注
關注
9文章
927瀏覽量
35489 -
總線
+關注
關注
10文章
2947瀏覽量
89325
發(fā)布評論請先 登錄
相關推薦
熱點推薦


如何使用ZPS-CANFD觀察CAN數(shù)據(jù)鏈路層的工作過程
CAN總線在數(shù)據(jù)鏈路層中的應用是其通信協(xié)議中的關鍵部分、它負責在物理層之上實現(xiàn)數(shù)據(jù)的可靠傳輸。致遠第二代CAN總線分析儀ZPS-CANFD,除了可以完成CAN、CANFD總線物理層的一

使用STM32H7的FDCAN通訊,為什么CAN1會收到CAN2的幀ID,CAN2也會收到CAN1的?
使用STM32H7的FDCAN通訊,請問為什么CAN1會收到CAN2的幀ID,CAN2也會收到CAN
發(fā)表于 03-14 10:33
HTTP網(wǎng)絡通訊過程
的 OSI 模型。 OSI ?是一種理論下的模型,而? TCP/IP ?已被廣泛使用,成為網(wǎng)絡互聯(lián)事實上的標準。 2. HTTP 網(wǎng)絡通訊過程 示例:簡單的網(wǎng)絡拓撲模型 詳解:當鍵入網(wǎng)址到網(wǎng)頁顯示的

EE-227:ADSP-21992 DSP的CAN配置過程
電子發(fā)燒友網(wǎng)站提供《EE-227:ADSP-21992 DSP的CAN配置過程.pdf》資料免費下載
發(fā)表于 01-14 17:18
?0次下載

快速了解CAN通訊原理及應用
一張圖看懂CAN總線的原理 圖1 CAN通信原理 參考上圖,簡單來說CAN總線就如兩根黃線,通信的原理就好比開一個電話會議,大家都同時撥進來,然后有各種不同的狀態(tài),比如:一個人說話,其
如何使用Arduino實現(xiàn)CAN總線通信
開源硬件平臺,通過添加CAN總線模塊,也可以實現(xiàn)CAN通信。 硬件準備 Arduino開發(fā)板 :可以選擇Arduino Uno、Mega等型號。 CAN總線模塊 :如MCP2515或M
STM32 GPIO的八種工作模式
GPIO (general purpose input output)是通用輸入輸出端口的簡稱,簡單來說就是軟件可控制的引腳,STM32芯片的GPIO引腳與外部設備連接起來,從而實現(xiàn)與外部通訊

CAN總線應用常見問題(2)CAN總線應用過程中的常見問題和解決辦法
CAN總線作為一種常用的通信協(xié)議,在汽車、工業(yè)自動化等領域得到廣泛應用。然而,由于各種原因,CAN總線在使用過程中可能會出現(xiàn)各種故障,本文將繼續(xù)講解CAN總線應用

芯力特車規(guī)TVS產品助力CAN/LIN通訊接口保護
芯力特深耕車規(guī)CAN/LIN通訊接口芯片,在大量的客戶項目應用中深入了解客戶需求后,推出了汽車級TVS防護器件,助力車規(guī)CAN/LIN通訊接口保護。該系列產品具備低鉗位電壓、高Ipp、

如何檢測can通訊電路的好壞
CAN(Controller Area Network)是一種基于總線通信的局域網(wǎng)技術,廣泛應用于汽車電子、工業(yè)控制等領域。在實際應用中,CAN通訊電路的好壞對整個系統(tǒng)的穩(wěn)定性和可靠性具有重要





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論