") 基于鴻蒙系統(tǒng)+Hi3861的WiFi小車開發(fā)
基于鴻蒙系統(tǒng)+Hi3861的WiFi小車開發(fā)
摘要
本文簡單介紹鴻蒙系統(tǒng) + Hi3861 的WiFi小車開發(fā),適用于開發(fā)潤和Hi3861開發(fā)板的小伙伴們。1、小車介紹
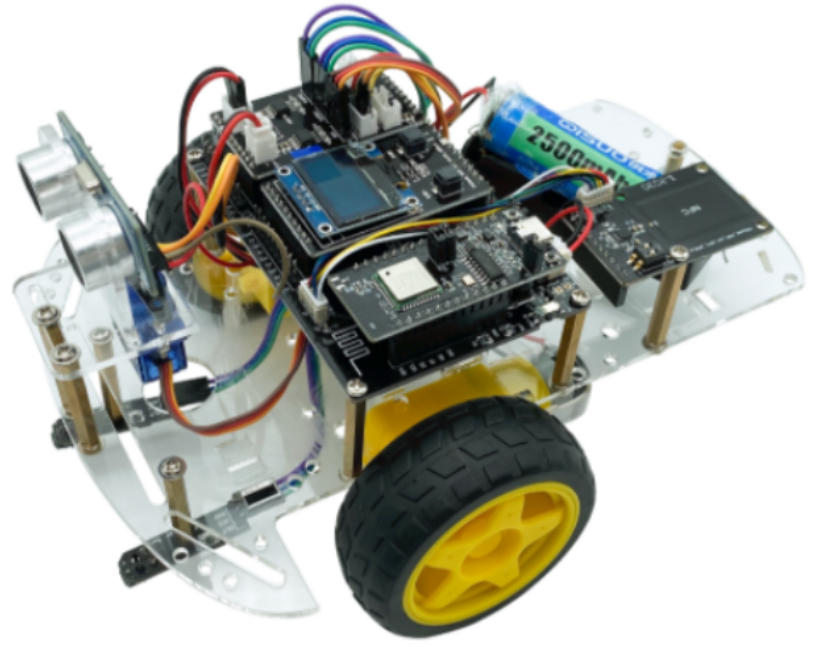
基于鴻蒙系統(tǒng) + Hi3861 的WiFi小車,首先,我們得有一套WiFi小車套件,其實也是Hi3861 加上電機、循跡模塊、超聲波等模塊。小車安裝完大概是這樣:
2、電機驅(qū)動
我們這里先只做最簡單的,驅(qū)動小車的電機,讓小車跑起來。電機的驅(qū)動板如下圖,目前電機驅(qū)動芯片用的是L9110S芯片。

典型的應用電路如下圖:
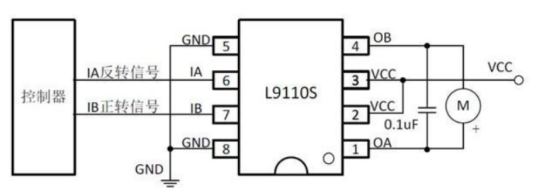
我們可以看到,如果要控制電機,我們芯片至少需要2路PWM信號,一路用于控制正轉(zhuǎn),一路用于控制反轉(zhuǎn)。
然后我們小車有兩個輪子,需要兩個電機,所以我們需要 4 路PWM信號。
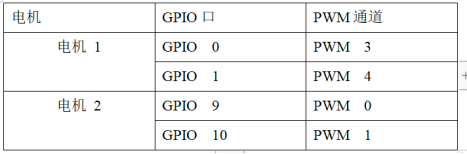
查閱小車資料,可以知道,目前Hi3861 芯片用來控制電機的4路PWM分別是:
基于鴻蒙系統(tǒng) + Hi3861 的wifi小車,可以通過電腦、手機控制-鴻蒙HarmonyOS技術(shù)社區(qū)
知道了PWM通道和對應的GPIO口,我們就可以開始編程了。
首先PWM初始化部分:
void pwm_init(void){hi_gpio_init();//引腳復用hi_io_set_func(HI_IO_NAME_GPIO_0, HI_IO_FUNC_GPIO_0_PWM3_OUT);hi_io_set_func(HI_IO_NAME_GPIO_1, HI_IO_FUNC_GPIO_1_PWM4_OUT);hi_io_set_func(HI_IO_NAME_GPIO_9, HI_IO_FUNC_GPIO_9_PWM0_OUT);hi_io_set_func(HI_IO_NAME_GPIO_10, HI_IO_FUNC_GPIO_10_PWM1_OUT);//初始化pwmhi_pwm_init(HI_PWM_PORT_PWM3);hi_pwm_init(HI_PWM_PORT_PWM4);hi_pwm_init(HI_PWM_PORT_PWM0);hi_pwm_init(HI_PWM_PORT_PWM1);}
向右滑動查看完整代碼
控制小車前進、后退、左轉(zhuǎn)、右轉(zhuǎn)、停止的函數(shù):
//停止void pwm_stop(void){//先停止PWMhi_pwm_stop(HI_PWM_PORT_PWM3);hi_pwm_stop(HI_PWM_PORT_PWM4);hi_pwm_stop(HI_PWM_PORT_PWM0);hi_pwm_stop(HI_PWM_PORT_PWM1);}void car_stop(void){car_info.cur_status = car_info.go_status;printf("pwm_stop ");pwm_stop();}//前進void pwm_forward(void){//先停止PWMhi_pwm_stop(HI_PWM_PORT_PWM3);hi_pwm_stop(HI_PWM_PORT_PWM4);hi_pwm_stop(HI_PWM_PORT_PWM0);hi_pwm_stop(HI_PWM_PORT_PWM1);//啟動A路PWMhi_pwm_start(HI_PWM_PORT_PWM3, 750, 1500);hi_pwm_start(HI_PWM_PORT_PWM0, 750, 1500);}void car_forward(void){if(car_info.go_status != CAR_STATUS_FORWARD){//直接退出return ;}if(car_info.cur_status == car_info.go_status){//狀態(tài)沒有變化,直接推出return;}car_info.cur_status = car_info.go_status;printf("pwm_forward ");pwm_forward();step_count_update();}//后退void pwm_backward(void){//先停止PWMhi_pwm_stop(HI_PWM_PORT_PWM3);hi_pwm_stop(HI_PWM_PORT_PWM4);hi_pwm_stop(HI_PWM_PORT_PWM0);hi_pwm_stop(HI_PWM_PORT_PWM1);//啟動A路PWMhi_pwm_start(HI_PWM_PORT_PWM4, 750, 1500);hi_pwm_start(HI_PWM_PORT_PWM1, 750, 1500);}void car_backward(void){if(car_info.go_status != CAR_STATUS_BACKWARD){//直接退出return ;}if(car_info.cur_status == car_info.go_status){//狀態(tài)沒有變化,直接推出return;}car_info.cur_status = car_info.go_status;printf("pwm_backward ");pwm_backward();step_count_update();}//左轉(zhuǎn)void pwm_left(void){//先停止PWMhi_pwm_stop(HI_PWM_PORT_PWM3);hi_pwm_stop(HI_PWM_PORT_PWM4);hi_pwm_stop(HI_PWM_PORT_PWM0);hi_pwm_stop(HI_PWM_PORT_PWM1);//啟動A路PWMhi_pwm_start(HI_PWM_PORT_PWM3, 750, 1500);}void car_left(void){if(car_info.go_status != CAR_STATUS_LEFT){//直接退出return ;}if(car_info.cur_status == car_info.go_status){//狀態(tài)沒有變化,直接推出return;}car_info.cur_status = car_info.go_status;printf("pwm_left ");pwm_left();step_count_update();}//右轉(zhuǎn)void pwm_right(void){//先停止PWMhi_pwm_stop(HI_PWM_PORT_PWM3);hi_pwm_stop(HI_PWM_PORT_PWM4);hi_pwm_stop(HI_PWM_PORT_PWM0);hi_pwm_stop(HI_PWM_PORT_PWM1);//啟動A路PWMhi_pwm_start(HI_PWM_PORT_PWM0, 750, 1500);}void car_right(void){if(car_info.go_status != CAR_STATUS_RIGHT){//直接退出return ;}if(car_info.cur_status == car_info.go_status){//狀態(tài)沒有變化,直接推出return;}car_info.cur_status = car_info.go_status;printf("pwm_right ");pwm_right();step_count_update();}
向右滑動查看完整代碼
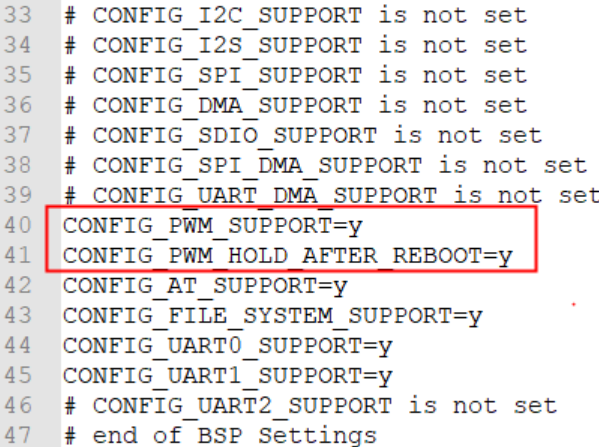
最后,要使用pwm功能,我們需要修改:
device/soc/hisilicon/hi3861v100/sdk_liteos/build/config/usr_config.mk
向右滑動查看完整代碼
增加這兩行,這里是打開PWM功能:
CONFIG_PWM_SUPPORT=yCONFIG_PWM_HOLD_AFTER_REBOOT=y
向右滑動查看完整代碼
3、WiFi控制部分
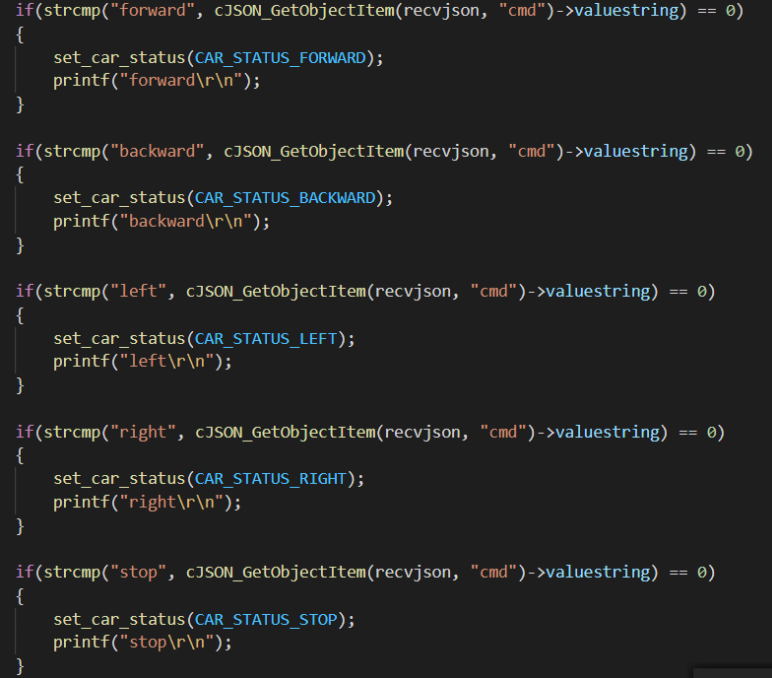
我們在小車上面簡單編寫一個UDP程序,監(jiān)聽50001端口號。這里使用的通信格式是json,小車收到UDP數(shù)據(jù)后,解析json,并根據(jù)命令執(zhí)行相應的操作,例如前進、后退、左轉(zhuǎn)、右轉(zhuǎn)等,代碼如下:
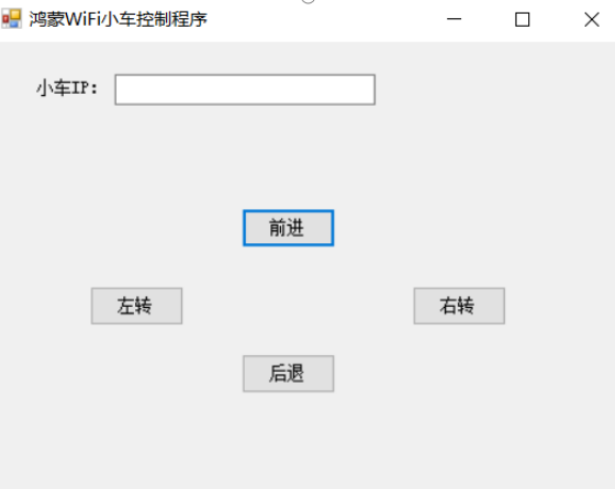
電腦端,使用C#編寫一個測試程序,可以手動輸入小車的IP地址,也可以不輸入IP地址,這樣,電腦端程序會發(fā)送廣播包給小車,也可以起到控制的功能。
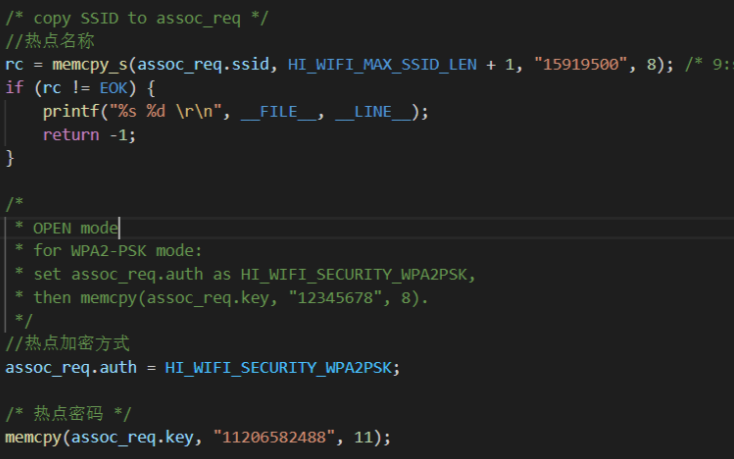
4、WiFi熱點連接
注意,我這里WiFi小車固件默認連接熱點的ssid是:

讀者需要自己修改成自己的熱點,文件:sta_entry.c
小車的源碼,C#控制端的代碼均開源,大家可以自由修改,發(fā)揮自己的想象,創(chuàng)造出更厲害炫酷的DIY產(chǎn)品。
本節(jié)鴻蒙小車開發(fā)教程就分享到這里了,下一篇我們給大家分享:使用語音控制鴻蒙小車,歡迎大家持續(xù)關(guān)注哦~
原文標題:OpenHarmony輕量系統(tǒng)開發(fā)【13】鴻蒙小車開發(fā)
文章出處:【微信公眾號:HarmonyOS官方合作社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
電機
+關(guān)注
關(guān)注
142文章
9000瀏覽量
145337 -
WIFI
+關(guān)注
關(guān)注
81文章
5296瀏覽量
203571 -
鴻蒙系統(tǒng)
+關(guān)注
關(guān)注
183文章
2634瀏覽量
66305 -
Hi3861
+關(guān)注
關(guān)注
1文章
59瀏覽量
6491
原文標題:OpenHarmony輕量系統(tǒng)開發(fā)【13】鴻蒙小車開發(fā)
文章出處:【微信號:HarmonyOS_Community,微信公眾號:電子發(fā)燒友開源社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
鴻蒙OpenHarmony【輕量系統(tǒng) 燒錄】 (基于Hi3861開發(fā)板)
盤點那些硬件+項目學習套件:Hi3861鴻蒙開發(fā)板及入門常見問題解答
OpenHarmony輕量系統(tǒng)開發(fā)【13】鴻蒙小車開發(fā)
HI3861 鴻蒙開發(fā)環(huán)境怎么搭建
HarmonyOS Hi3861 WiFi操作 熱點鏈接
如何使用 HiBurn 工具燒錄鴻蒙的 .bin 文件到 Hi3861 開發(fā)板
基于鴻蒙系統(tǒng)+Hi3861的WiFi小車詳解
Hi3861其他驅(qū)動的開發(fā)示例
Hi3861編譯燒錄更快捷
中文編程鴻蒙Hi3861開發(fā)基礎案例之-01創(chuàng)建新工程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論