") 傳感器融合+AI“專業(yè)對(duì)口”,博世和英偉達(dá)相中高精地圖廠商
傳感器融合+AI“專業(yè)對(duì)口”,博世和英偉達(dá)相中高精地圖廠商
想必大伙從近來的新聞中也能看出,L2+以上的自動(dòng)駕駛成了整個(gè)汽車行業(yè),乃至上游廠商都為之奮斗的目標(biāo)。他們選擇的路線也都各式各樣,比如高算力自動(dòng)駕駛芯片或是多傳感器融合等,然而還有一條路線被不少廠商看好,也再度引發(fā)了一波收購潮。
這條路線正是高精地圖,傳統(tǒng)的駕駛導(dǎo)航中精確至米級(jí)的地圖精度就已經(jīng)夠用,畢竟人可以負(fù)責(zé)高精度的駕駛和判斷能力。而自動(dòng)駕駛汽車則更需要高精度的地圖,將更多的數(shù)據(jù)交由機(jī)器處理,作為一個(gè)給機(jī)器識(shí)別的地圖,從而保證車輛的安全行駛。
無論是汽車廠商還是自動(dòng)駕駛方案商,都對(duì)這一地圖技術(shù)情有獨(dú)鐘,紛紛斥資收購。比如豐田的自動(dòng)駕駛子公司收購了高精地圖創(chuàng)企Carmera,小米收購了深動(dòng)科技,英偉達(dá)收購了DeepMap,以及最近博世收購的Atlatec。高精地圖這項(xiàng)技術(shù)吸引了不少創(chuàng)企的投入,而最近自動(dòng)駕駛賽道的火熱也讓不少有心布局的公司看上了這些創(chuàng)企。此外,一些傳統(tǒng)的地圖與測(cè)繪廠商也紛紛發(fā)展高精地圖業(yè)務(wù),希望在這個(gè)市場(chǎng)分一杯羹。
Atlatec:低成本易部署的測(cè)繪
Atlatec作為一家高精地圖創(chuàng)企,擁有可謂極度正統(tǒng)的德國出身,兼具歐洲頂尖理工大學(xué)卡爾斯魯厄理工學(xué)院和KZI信息科技研究中心的背景,這兩家在機(jī)器視覺上都擁有不小的實(shí)力,可能這也是為何同為德國企業(yè)的博世選擇將其收購的原因之一。
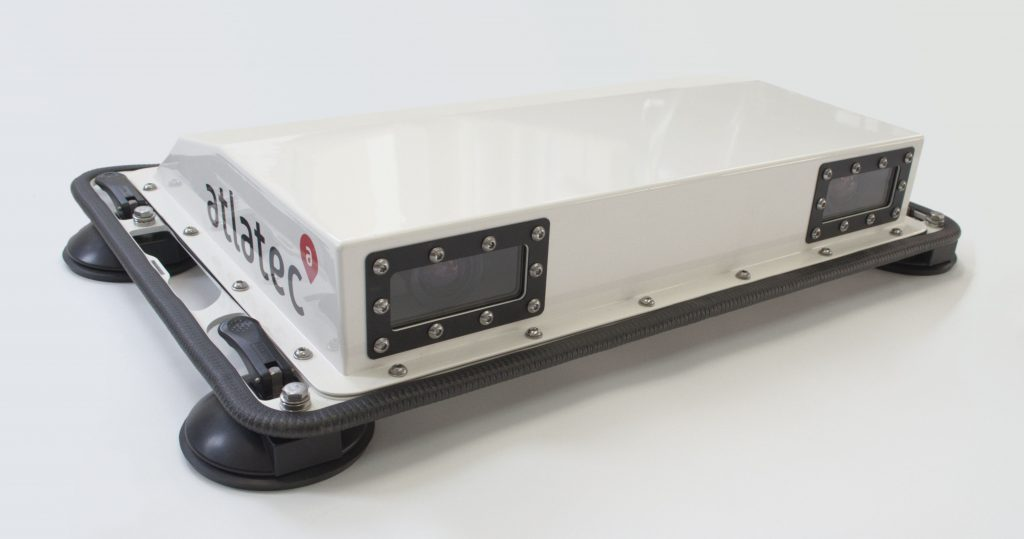
那么Atlatec的3D測(cè)繪高精地圖選擇了怎樣的路線呢?答案自然還是車載測(cè)繪模組,上圖就是Atlatec裝在車頂?shù)膫鞲衅鳌Ec動(dòng)輒使用上萬元的激光雷達(dá)方案相比,Atlatec選用了低成本的路線。主傳感器上,Atlatec采用了兩個(gè)前向攝像頭作為主傳感器的純視覺方案,每個(gè)攝像頭之間相隔40厘米。根據(jù)Atlatec的說法,這么做可以將體積縮小到手提箱大小,又不會(huì)犧牲深度圖像的分辨率。畢竟如今不少的測(cè)繪車輛在用到非固態(tài)激光雷達(dá)時(shí),車頂或車身都要犧牲不小的空間。

車道標(biāo)注 / Atlatec
在道路數(shù)據(jù)的還原重構(gòu)上,Atlatec用到了AI加手動(dòng)標(biāo)注的方法,畢竟即便AI已經(jīng)可以高精度地識(shí)別各種道路與元素,但手動(dòng)標(biāo)注才是確保數(shù)據(jù)與地圖高度一致的把關(guān)之法。
高精地圖依賴的不僅僅是道路數(shù)據(jù),傳統(tǒng)GPS地圖的定位數(shù)據(jù)還是十分重要,盡管這些數(shù)據(jù)可以由傳統(tǒng)地圖供應(yīng)商提供,但融入自動(dòng)駕駛方案中,依然可以起到一定的輔助作用。因此,該模組中還包含了測(cè)繪級(jí)的差分GPS傳感器,進(jìn)一步優(yōu)化了地圖精度。
差分GPS傳感器允許用到來自GPS基站的校正數(shù)據(jù)來補(bǔ)充實(shí)時(shí)衛(wèi)星信號(hào),與單純利用GPS衛(wèi)星信號(hào)相比,可以說減少了在全球定位上的誤差,或者以Atlatec的說法,在GPS信號(hào)接收良好的區(qū)域?qū)⑵钭龅叫∮?厘米。
除了攝像頭和GPS之外,為了進(jìn)一步補(bǔ)充精度,Atlatec還在該模組中加入了基于IMU的冗余傳感器。最后在處理階段通過三者的傳感器融合數(shù)據(jù),重構(gòu)車輛及周圍環(huán)境的軌跡。
而對(duì)于博世來說,無論是攝像頭、GPS還是IMU,自己都有對(duì)應(yīng)的方案,加上又是一家知根知底的德國企業(yè),確實(shí)算得上收購的首選了。不過目前Atlatec的地圖覆蓋范圍還不算太大,目前只覆蓋了美國、歐洲和日本地區(qū),但被博世收購之后,可能會(huì)加快這一進(jìn)程。
DeepMap:眾包制圖與AI處理
早在被英偉達(dá)收購之前,DeepMap已經(jīng)擁有不容小覷的高精地圖構(gòu)建能力,博世也在2018年投資過,但最終被英偉達(dá)納入囊中。DeepMap曾繪制了硅谷圣何塞地區(qū)的高精地圖,納入了道路和街道環(huán)境的詳細(xì)特征,語義信息的精度達(dá)到厘米級(jí),可以準(zhǔn)確分辨顯/隱讓行線、行駛邊界和車道線等。

圣何塞高精地圖 / DeepMap
那么他們是如何創(chuàng)建如此高精度的地圖的呢?在數(shù)據(jù)收集方面其實(shí)沒有多少特殊的,多數(shù)高精度的地圖繪制都用到了攝像頭和激光雷達(dá),DeepMap也不例外,但他們的方案一開始就建立在眾包的概念上。在被收購前幾天,DeepMap推出了一套可擴(kuò)展的地圖服務(wù)RoadMemory,允許OEM通過L2+以上的車型利用車載傳感器收集的眾包數(shù)據(jù)來自動(dòng)構(gòu)建地圖,從而完善自己的高精度圖DeepMapHDR,提高其保真度和準(zhǔn)確性。

DeepMap測(cè)繪車 / DeepMap
但對(duì)這些眾包數(shù)據(jù)的處理就用到了ML和AI技術(shù),靠語義分割和視頻圖像推理來獲取可用的數(shù)據(jù),這一塊屬于DeepMap的強(qiáng)項(xiàng),卻也是英偉達(dá)的強(qiáng)項(xiàng)。英偉達(dá)在深度神經(jīng)網(wǎng)絡(luò)訓(xùn)練和驗(yàn)證上已經(jīng)有了多年的經(jīng)驗(yàn),自動(dòng)駕駛方案已NvidiaDrive經(jīng)遍布了各大車廠也與各大傳感器兼容,可以說沒有誰比英偉達(dá)更適合完成眾包地圖數(shù)據(jù)的收集了。
小結(jié)
從以上兩家創(chuàng)企的技術(shù)路線以及被收購的情況來看,收購一方更看重的除了其技術(shù)優(yōu)勢(shì)以外,也相當(dāng)看好其方案與其現(xiàn)有產(chǎn)品陣容的相性,最終實(shí)現(xiàn)一個(gè)1+1大于2的效果。無論是測(cè)繪車隊(duì),還是眾包制圖,都有可能成為自動(dòng)駕駛實(shí)現(xiàn)道路上的一大助力,英偉達(dá)和博世這樣的自動(dòng)駕駛方案廠商正是看清楚了這一點(diǎn)。至于OEM、造車新勢(shì)力以及傳統(tǒng)導(dǎo)航地圖廠商在高精地圖上的探索,那就又是另一套商業(yè)模式了。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51353瀏覽量
755611 -
AI
+關(guān)注
關(guān)注
87文章
31399瀏覽量
269808 -
博世
+關(guān)注
關(guān)注
11文章
434瀏覽量
74713
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
英偉達(dá)與軟銀攜手共建日本AI基礎(chǔ)設(shè)施
英偉達(dá)AI服務(wù)器將革新采用插槽式設(shè)計(jì)
英偉達(dá)投資日本AI公司Sakana AI

英偉達(dá)Blackwell架構(gòu)揭秘:下一個(gè)AI計(jì)算里程碑?# 英偉達(dá)# 英偉達(dá)Blackwell
Bosch Sensortec 博世 傳感器選型應(yīng)用

傳感器+AI,融了7個(gè)億,華為基恩士博世……都在搞AI傳感器







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論