") 事件相機(jī)定義與設(shè)計(jì)
事件相機(jī)定義與設(shè)計(jì)
編者薦語
事件相機(jī)是一款新型傳感器。不同于傳統(tǒng)相機(jī)拍攝一幅完整的圖像,事件相機(jī)拍攝的是“事件”,可以簡單理解為“像素亮度的變化”,即事件相機(jī)輸出的是像素亮度的變化情況。
前言
第一次聽到“事件”相機(jī),你一定會(huì)吐槽它的名字:“什么玩意?”、“不知所云”、“太拗口了!”
沒辦法,event camera 直譯過來就是事件相機(jī),雖然我覺得這個(gè)稱呼不太直接,或許翻譯為“微動(dòng)”相機(jī)之類的更貼切吧。但不妨礙,它是一個(gè)神奇的存在,和目前我們常見的視覺相機(jī)在原理上大相徑庭,目前能夠量產(chǎn)事件相機(jī)的公司又屈指可數(shù),當(dāng)然價(jià)格也非常“鶴立雞群”,在動(dòng)態(tài)感知方面能夠拍攝到“飛行的子彈”,說它是相機(jī)中的戰(zhàn)斗機(jī)大家應(yīng)該沒有意見吧?
下面是關(guān)于事件相機(jī)的起源設(shè)計(jì)思路、原理、特點(diǎn)和分類的概述。歡迎留言區(qū)交流
1 事件相機(jī)定義與設(shè)計(jì)
1.1 事件相機(jī)的定義及潛在應(yīng)用
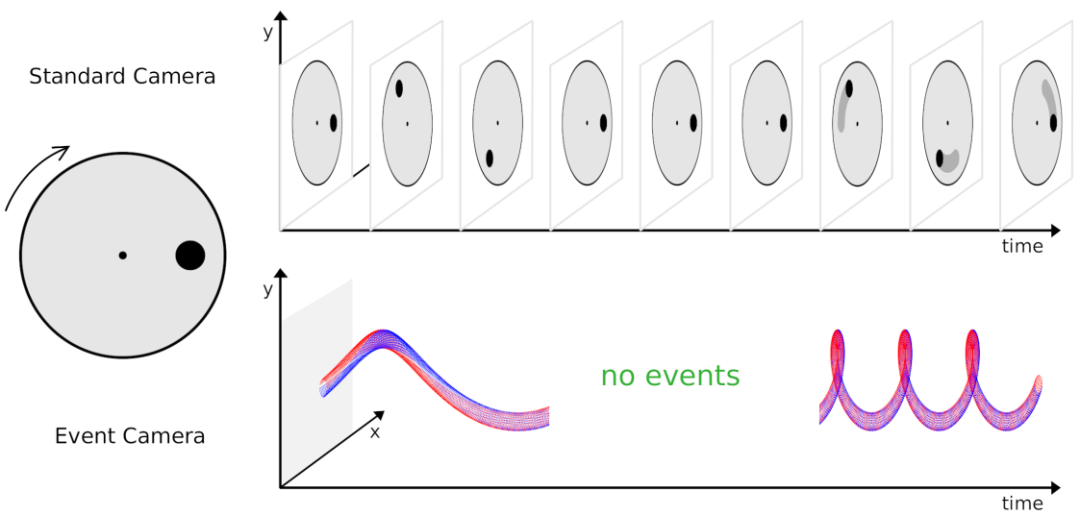
事件相機(jī)(event cameras)是一種生物啟發(fā)的視覺傳感器,以完全不同于標(biāo)準(zhǔn)相機(jī)的方式工作。事件相機(jī)不是以恒定速率輸出強(qiáng)度圖像幀,而是僅輸出局部像素級(jí)亮度變化的相關(guān)信息。這些像素級(jí)亮度變化(稱為事件)超過設(shè)定閾值時(shí),事件相機(jī)以微秒級(jí)分辨率標(biāo)記時(shí)間戳,并輸出異步事件流。
事件相機(jī)相比于普通相機(jī)的優(yōu)勢:
低數(shù)據(jù)率
低能耗
低延遲
高動(dòng)態(tài)范圍(HDR)
普通相機(jī)問題:
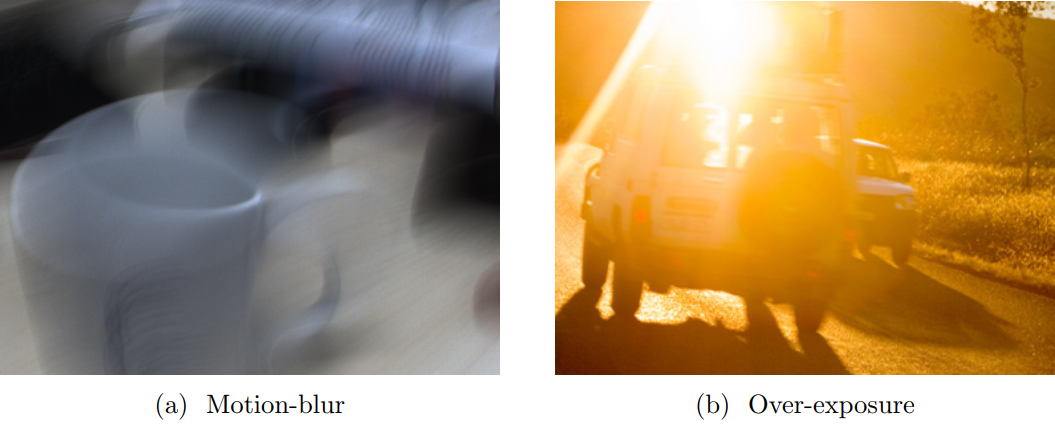
HDR: DVS (Dynamic Vision Sensor) 的動(dòng)態(tài)范圍約120dB, 而普通相機(jī)的動(dòng)態(tài)范圍只有60dB -> 抵抗極端環(huán)境.
低延遲: 極高的時(shí)間分辨率使得事件相機(jī)可以實(shí)時(shí)高速感知周圍環(huán)境并提供準(zhǔn)確的輸出--->達(dá)成無人駕駛的目的
低數(shù)據(jù)率: 高速的普通相機(jī)每秒會(huì)生成至少上百張圖片,而事件相機(jī)每秒只生成幾百kb的數(shù)據(jù)--->無人機(jī)
低能耗: 事件相機(jī)只消耗非常少的能量,例如當(dāng)普通的frame-based相機(jī)功率為1~2W時(shí),事件相機(jī)的功率只有24mW. -> VR/AR設(shè)備
1.2 事件相機(jī)設(shè)計(jì)
事件攝像機(jī)的設(shè)計(jì)模仿了生物視網(wǎng)膜的特點(diǎn),并提供了一個(gè)從普通基于幀的(frame-based)相機(jī)的范式轉(zhuǎn)變.
1.2.1 神經(jīng)形態(tài)硅視網(wǎng)膜
在生物學(xué)的器官中,人類這樣的脊椎動(dòng)物的視網(wǎng)膜是眼睛內(nèi)表面的一層薄薄的組織,能將光轉(zhuǎn)換成電脈沖.
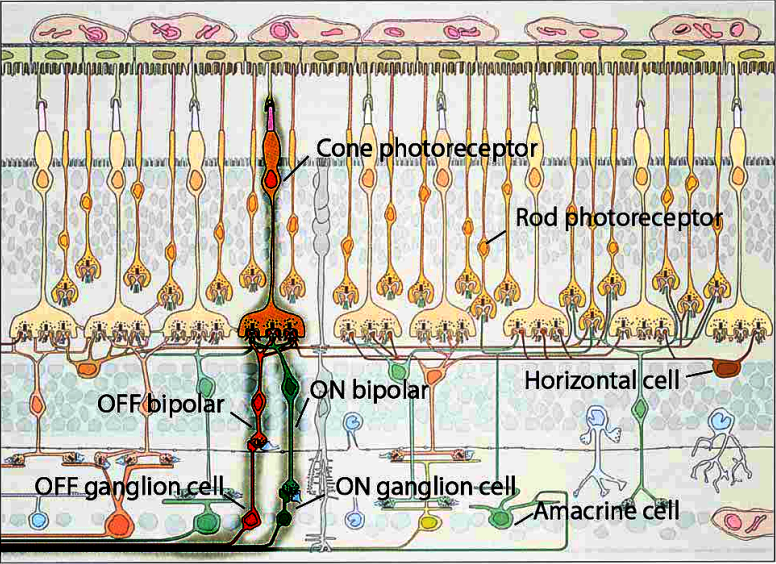
視網(wǎng)膜可以被分成以下三個(gè)部分:
光感受器層
組成元件: 視桿細(xì)胞和視錐細(xì)胞(神經(jīng)細(xì)胞)
層級(jí)功能: 將接收到的光轉(zhuǎn)化為電脈沖
外叢狀層
組成元件:雙極細(xì)胞(on- 和 off- 型)
層級(jí)功能: 將時(shí)空間的亮度變化進(jìn)行編碼
內(nèi)叢狀層
組成元件:水平細(xì)胞和神經(jīng)節(jié)細(xì)胞
層級(jí)功能: 進(jìn)行亮度調(diào)節(jié),并將電脈沖傳遞至多條并行通路進(jìn)行處理

這些細(xì)胞可以按其結(jié)構(gòu)大致分為以下功能:
對(duì)亮度的瞬間變化敏感的細(xì)胞,
對(duì)持續(xù)不變亮度敏感的單元,根據(jù)環(huán)境光調(diào)整其他單元
對(duì)特定運(yùn)動(dòng)方向敏感的細(xì)胞
對(duì)局部區(qū)域空間變化敏感的細(xì)胞
對(duì)顏色的特定波長的光敏感的細(xì)胞
這種生物性視網(wǎng)膜有許多令人滿意的特性,使其具有潛在的極大優(yōu)于傳統(tǒng)的圖像傳感器的應(yīng)用價(jià)值。
1.2.2 事件相機(jī)設(shè)計(jì)
區(qū)別于普通相機(jī),事件相機(jī)測量的不是絕對(duì)的光照強(qiáng)度,而測量的是光強(qiáng)的變化
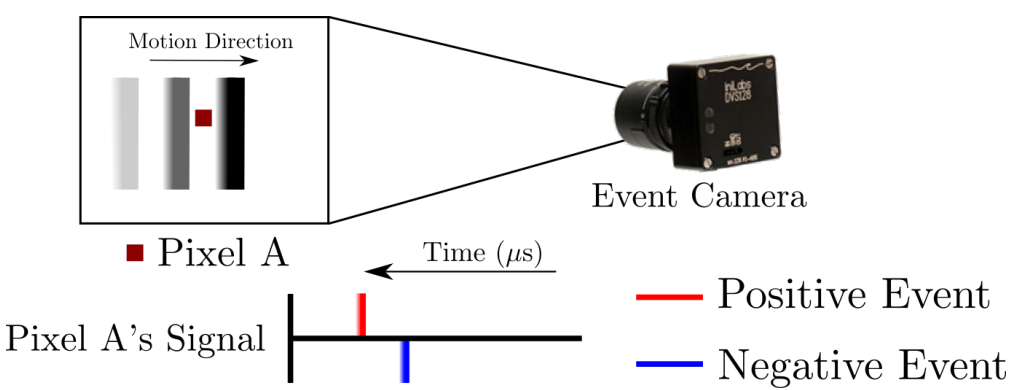
一個(gè)相機(jī)像素處的光強(qiáng)變化會(huì)觸發(fā)事件相機(jī)發(fā)送二進(jìn)制信號(hào),0表示變暗,1表示變亮
每個(gè)像素是獨(dú)立的,因此一旦發(fā)生變化,二進(jìn)制信號(hào)就立即被發(fā)送出去
發(fā)送出去的信號(hào)是連續(xù)的且不基于相機(jī)幀的
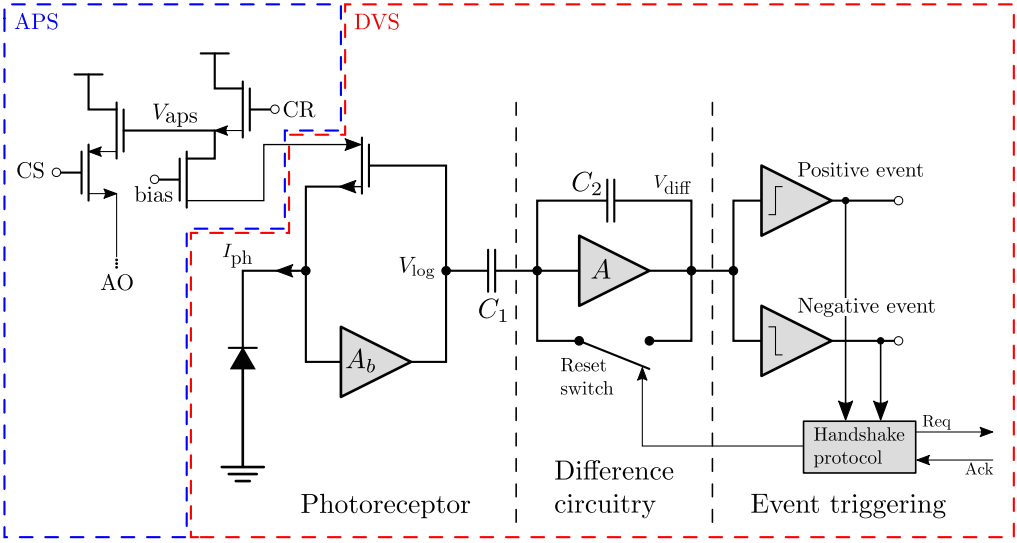
事件相機(jī)的每個(gè)像素都有實(shí)現(xiàn)三個(gè)邏輯功能的模擬電路:
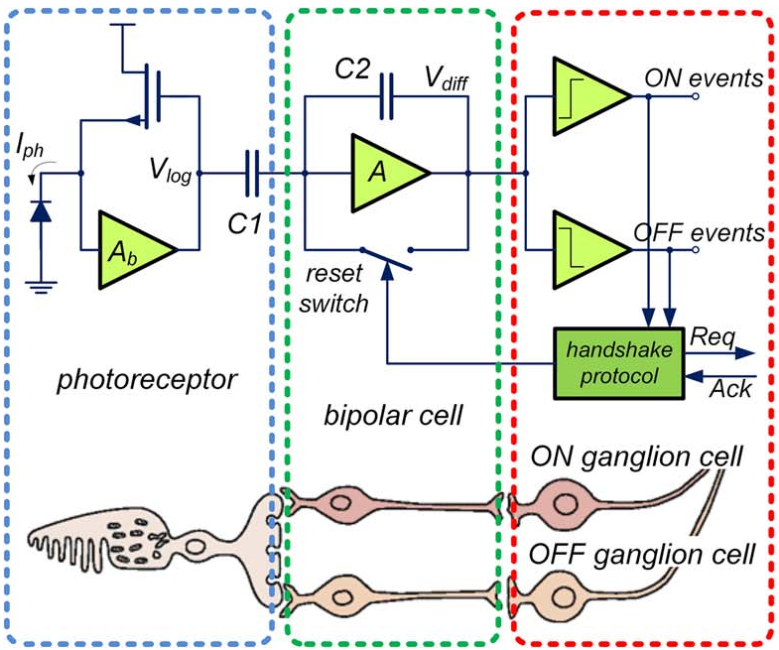
光感受器 : 將光轉(zhuǎn)化為電流
差分電路 : 計(jì)算從上一個(gè)事件開始至今的變化量(差分),并通過與預(yù)設(shè)的內(nèi)部閾值進(jìn)行對(duì)比來選擇是否觸發(fā)事件
比較器: 在觸發(fā)事件后,將差分電路復(fù)位并開始計(jì)算下一個(gè)事件的差分
2 事件相機(jī)分類:
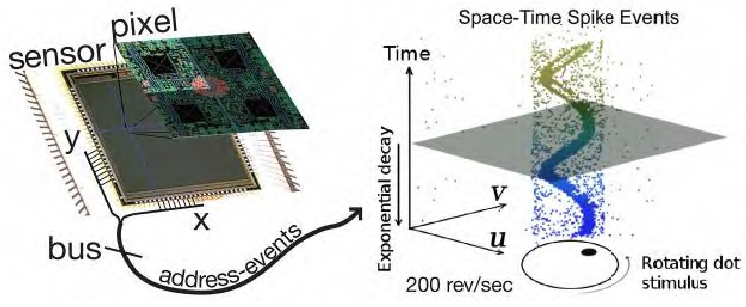
2.1 DVS (Dynamic Vision Sensor)
DVS是一個(gè)純基于事件的相機(jī)
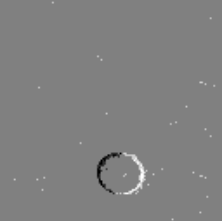
上圖是使用DVS在一個(gè)時(shí)間間隔內(nèi)累積事件的一個(gè)可視化圖像輸出
DVS 電路:
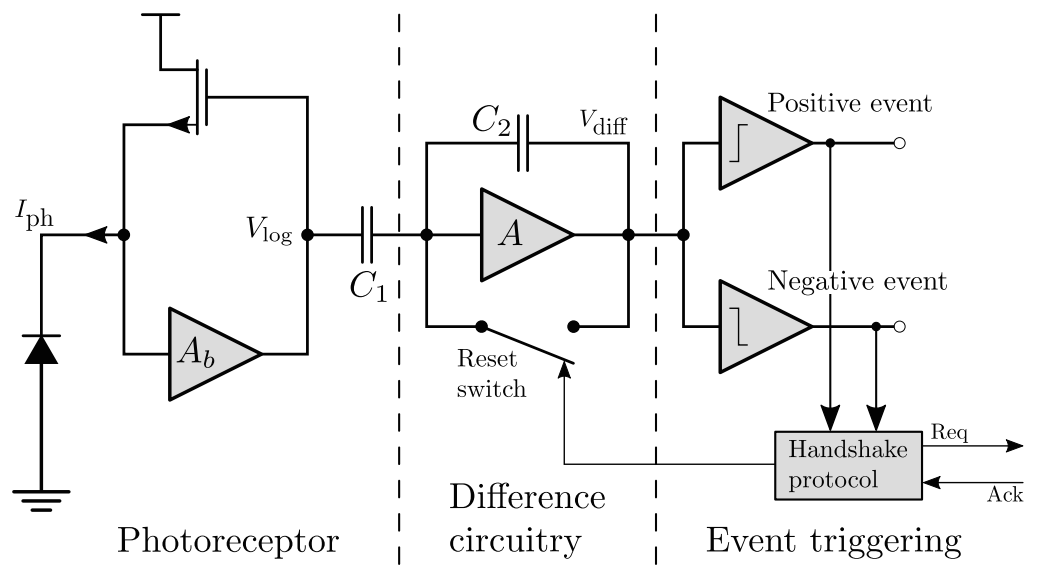
光度測量 第一步是將光電流轉(zhuǎn)換成與光強(qiáng)的對(duì)數(shù)成比例的電壓:
差分電路
檢查光電流對(duì)數(shù)的變化量是否超過用戶在傳感器配置中預(yù)先設(shè)置的事件閾值.
通過被放大,每當(dāng)超過事件閾值時(shí),處集成的電荷被重置
事件觸發(fā)
如果光強(qiáng)變化超過閾值,則觸發(fā)有符號(hào)的異步事件輸出
當(dāng)一個(gè)事件在時(shí)被觸發(fā)時(shí),并且光的變化量滿足, 其中
這可以解釋為DVS像素可以檢測到的最小對(duì)比度。然而,在實(shí)際應(yīng)用中,這受到光感受器噪聲和傳感器帶寬的限制。事件攝影機(jī)測量的對(duì)比度可以視為標(biāo)準(zhǔn)化的時(shí)間差:
因?yàn)? 在弱光環(huán)境中,事件的觸發(fā)比在明亮場景中的變化要小
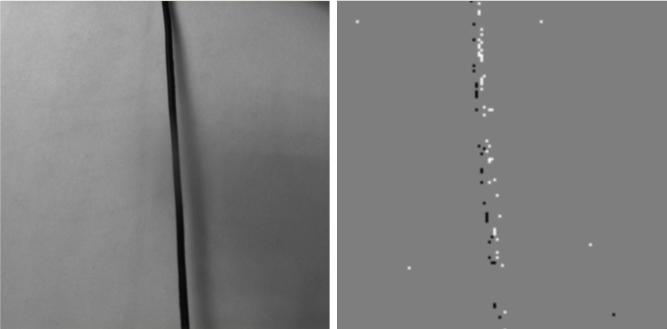
2.2 DAVIS (Dynamic and Active Vision Sensor)
DAVIS 與DVS相比,結(jié)合了一個(gè)基于幀(frame-based)的相機(jī) (與事件相機(jī)非同步),通過曝光生成的像素可以提供事件數(shù)據(jù)中所缺少的豐富紋理信息。
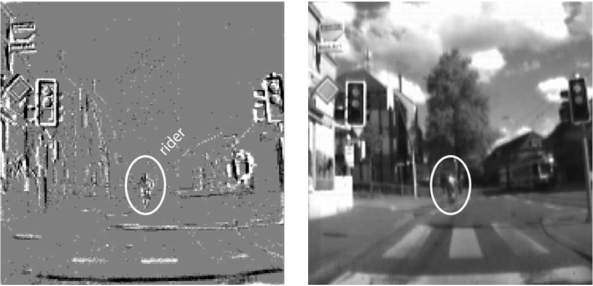
上方左圖是DAVIS相機(jī)在一定的時(shí)間間隔內(nèi)收集到的事件的可視化輸出圖像,右圖是其中所帶的基于幀的相機(jī)采集的圖像。
下圖是一個(gè)DAVIS相機(jī)的邏輯電路,其中APS為普通相機(jī)部分,DVS為事件相機(jī)部分
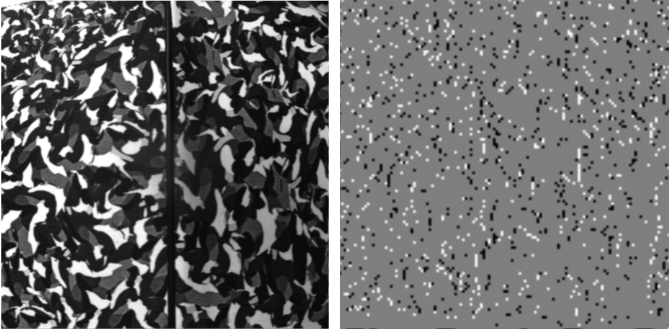
2.3 ATIS (Asynchronous Time-based Image Sensor)
ATIS在DVS的基礎(chǔ)上巧妙地引入了基于時(shí)間間隔的光強(qiáng)測量電路來實(shí)現(xiàn)圖像重構(gòu)
每次 DVS 電路產(chǎn)生事件時(shí),觸發(fā)光強(qiáng)測量電路進(jìn)行工作;光強(qiáng)測量設(shè)定了兩個(gè)不同的參考電壓, 通過對(duì)光強(qiáng)進(jìn)行積分,并記錄達(dá)到兩個(gè)電壓發(fā)放的事件;由于不同光強(qiáng)的條件下,電壓變化相同量所需的時(shí)間不同,通過建立光強(qiáng)與時(shí)間的映射可以推斷出光強(qiáng)大小,從而輸出光強(qiáng)變化像素處的光強(qiáng)信息,ATIS 引入了一套全局發(fā)放機(jī)制,即所有像素可被強(qiáng)制發(fā)放一次脈沖,這樣在 ATIS 初始工作時(shí)可獲得一整幅圖像作為背景,然后運(yùn)動(dòng)區(qū)域不斷產(chǎn)生脈沖進(jìn)而不斷的觸發(fā)光強(qiáng)測量電路獲得運(yùn)動(dòng)區(qū)域的灰度來更新背景。
以下是一個(gè)ATIS相機(jī)的輸出:
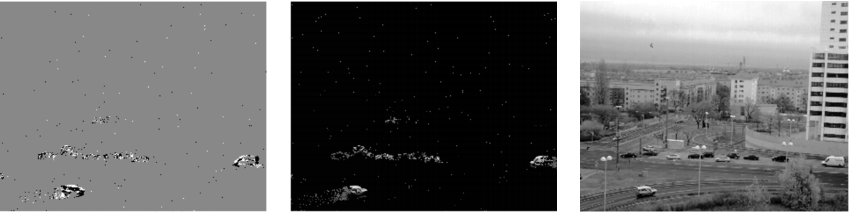
從上圖左邊和中間部分顯示了在一個(gè)時(shí)間間隔內(nèi)累積事件和解碼強(qiáng)度測量的圖像。
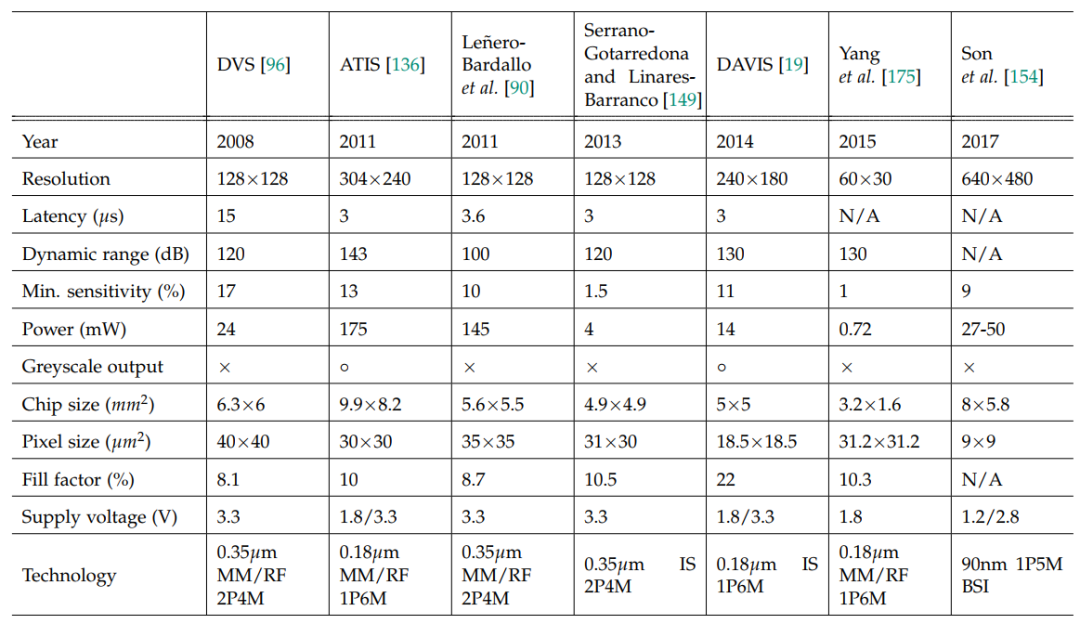
ATIS相比于DVS的主要優(yōu)勢在于它的分辨率更高(304×240), 動(dòng)態(tài)范圍更高(143 dB) 有更低的能耗(3),最重要的是事件能夠觸發(fā)一次全局的HDR輸出。
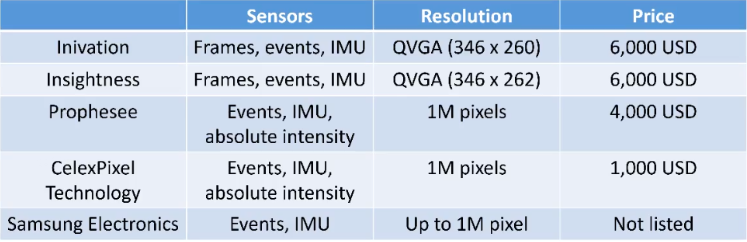
2.4 幾種事件相機(jī)的對(duì)比與總結(jié)
性能參數(shù)
價(jià)格
3 事件相機(jī)數(shù)據(jù)處理
3.1 事件數(shù)據(jù)
事件相機(jī)生成與基于幀相機(jī)完全不同的信號(hào).
事件相機(jī)的輸出是基于目標(biāo)的運(yùn)動(dòng)的.
事件相機(jī)只知道該像素處的亮度發(fā)生了變化,但不知道亮度有多大
這使得事件相機(jī)難以檢測邊緣信息,并且在具有復(fù)雜紋理的背景下表現(xiàn)不好
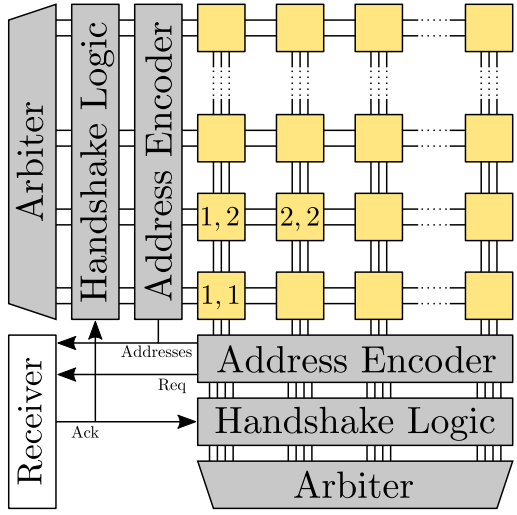
3.2 地址事件表示
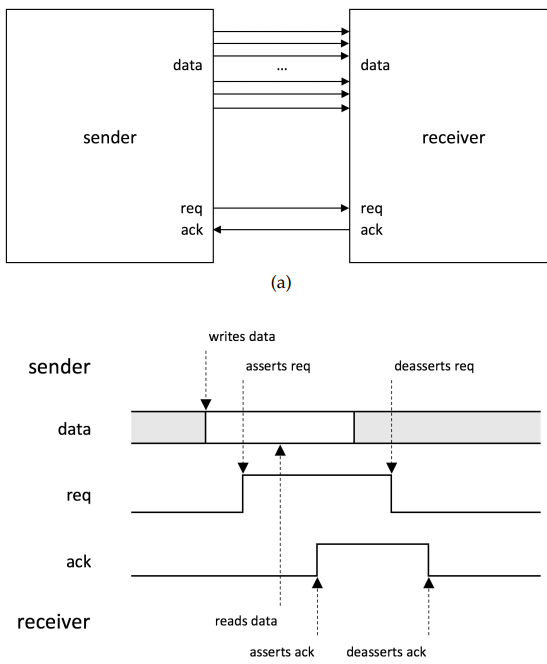
事件相機(jī)的輸出信號(hào)是異步且稀疏的。為了解決傳感器的動(dòng)態(tài)行為,事件攝像機(jī)類型硬件中的一個(gè)常見策略是使用地址事件表示(AER)協(xié)議。
每個(gè)陣列的元素都被分配了一個(gè)地址,對(duì)應(yīng)于它在圖像中的-位置.
每個(gè)陣列單元以隨機(jī)方式生成一個(gè)信號(hào),該信號(hào)在模塊間高速異步AER總線上傳輸
所有元素共享相同的物理總線來傳輸它們的信號(hào),并附加上時(shí)間信息
AER的示意圖如下:
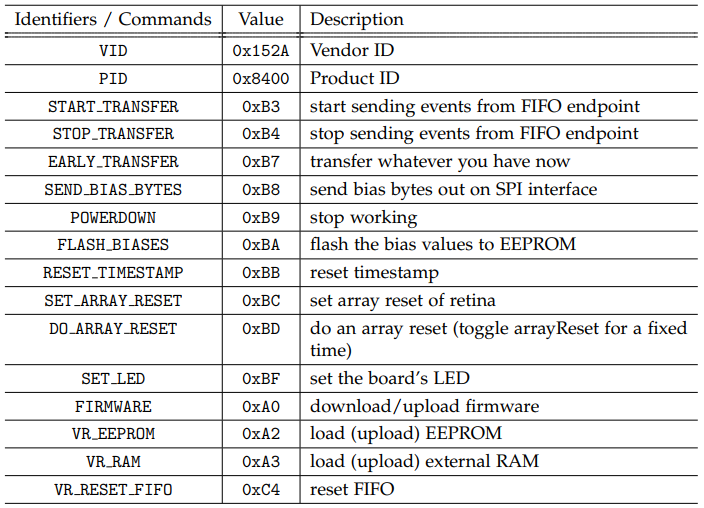
DVS事件攝像機(jī)與標(biāo)準(zhǔn)USB設(shè)備一樣,可以通過其VID和PID進(jìn)行識(shí)別,并使用下表中列出的預(yù)定義命令與標(biāo)準(zhǔn)PC上運(yùn)行的應(yīng)用程序進(jìn)行通信。
與AER事件包不同的是,通過DVS USB接口傳輸?shù)拿總€(gè)事件都增加了一個(gè)微秒級(jí)別分辨率的時(shí)間戳,并編碼在一個(gè)4字節(jié)長的數(shù)據(jù)包中,如下圖所示,帶有圖像中的位置、事件的極性和時(shí)間戳.
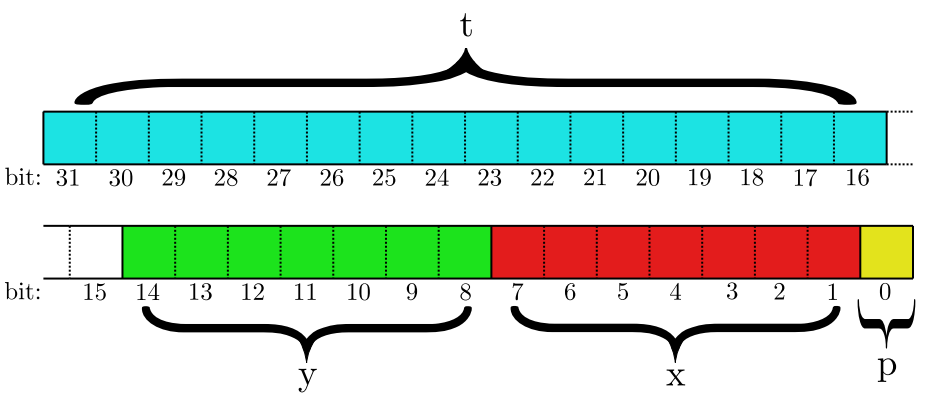
DVS128 相機(jī)的最大帶寬是每秒1M個(gè)事件.
3.3 事件相機(jī)模擬器
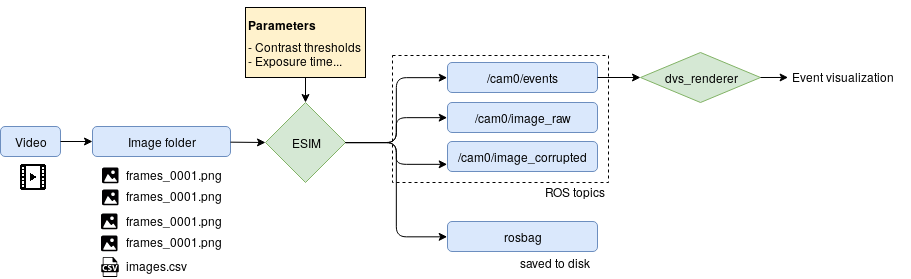
事件相機(jī)模擬器是通過線性插值和高斯噪聲的方式模擬出事件流來,在此選用的是UZH發(fā)布的ESIM模擬器。

在模擬中的轉(zhuǎn)換方法概述如下圖所示。首先,我們將從文件夾中的輸入視頻中提取各個(gè)幀。其次,運(yùn)行ESIM,提供圖像文件夾作為模擬事件的輸入。最后,將看使用dvs_render渲染器節(jié)點(diǎn)可視化模擬事件。
審核編輯 :李倩
-
相機(jī)
+關(guān)注
關(guān)注
4文章
1358瀏覽量
53724 -
視覺傳感器
+關(guān)注
關(guān)注
3文章
250瀏覽量
22908
原文標(biāo)題:科普 | 事件相機(jī),我說它是相機(jī)中的戰(zhàn)斗機(jī),大家沒意見吧?
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

工業(yè)相機(jī)選型教程2# 工業(yè)相機(jī)# 工業(yè)相機(jī)選型#
高速相機(jī)有什么用?讓科學(xué)原理來到我們眼前。#高速相機(jī) #燃燒 #實(shí)驗(yàn)

深視智能高速相機(jī)觀測水滴滴落過程#高速相機(jī) #高清高速相機(jī) #高速工業(yè)相機(jī) #工業(yè)相機(jī) #機(jī)器視覺 #傳感器
1394工業(yè)相機(jī)的定義與結(jié)構(gòu)
數(shù)碼相機(jī)等效感光度
相機(jī)也要來湊熱鬧?佳能新技術(shù):相機(jī)裝上指紋傳感器擁有指紋識(shí)別功能
工業(yè)相機(jī)的定義及其穩(wěn)定性分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論