 低速自動駕駛技術:APA
低速自動駕駛技術:APA
面有了飛速發展,還出現了智能化的趨勢。“自動泊車”就是一個大家非常熟悉的功能,透過它我們能看到汽車智能化發展的縮影。 簡介:什么是“自動泊車”? 自動泊車系統簡稱APA。 搭載有自動泊車功能的汽車可以不需要人工干預,通過車載傳感器、處理器和控制系統的幫助就可以實現自動識別車位,并自動完成泊車入位的過程。一般來說,在20萬以上的中高端汽車上往往才有搭載,或者作為一項選裝功能獨立存在。(現在已經下探到15萬左右,當然了,一般是自主品牌才敢給出這個極具性價比的配置)
自動泊車系統可以大大簡化泊車過程,特別是在極端狹窄的地方,或者是對于新手而言,自動泊車系統可以帶來更加智能和便捷的體驗。
01 定義
自動泊車系統主要是利用遍布車輛自身和周邊環境里的傳感器,測量車輛自身與周邊物體之間的相對距離、速度和角度,然后通過車載計算平臺或云計算平臺計算出操作流程,并控制車輛的轉向和加減速,以實現自動泊入、泊出及部分行駛功能。 整個泊車過程大致可包含以下五大環節: 環境感知 停車位檢測與識別 泊車路徑規劃 泊車路徑跟隨控制 模擬顯示 按照泊車方式,分為三種模式,如圖1所示: 平行式泊車 垂直式泊車 斜列式泊車
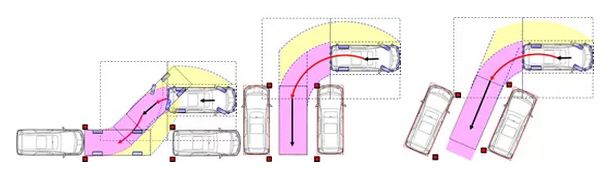
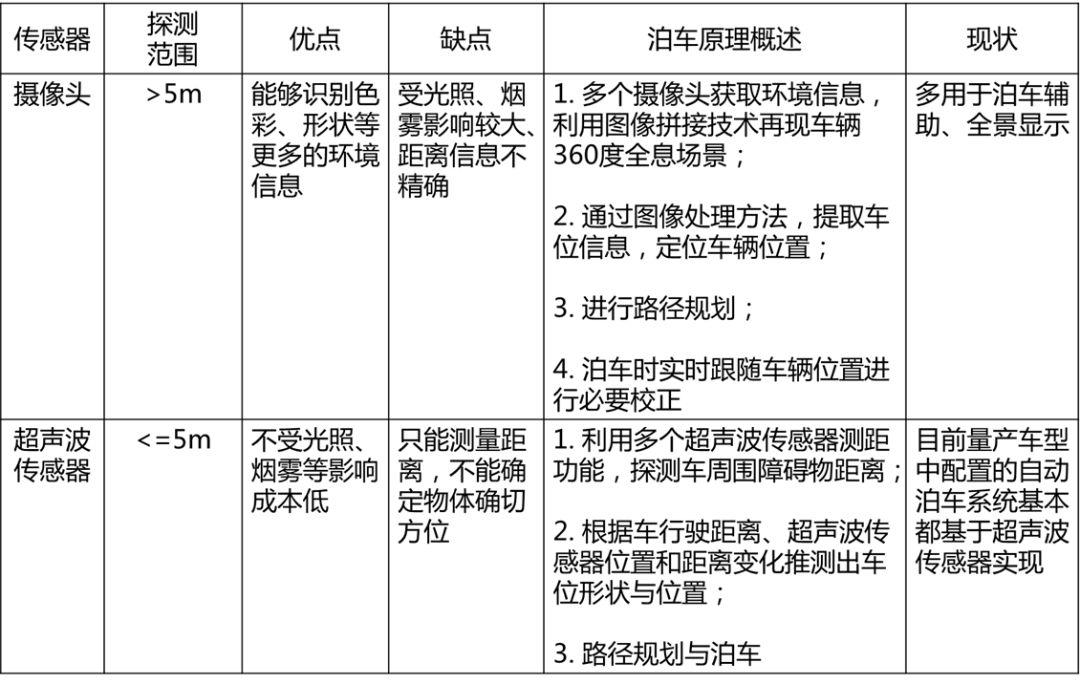
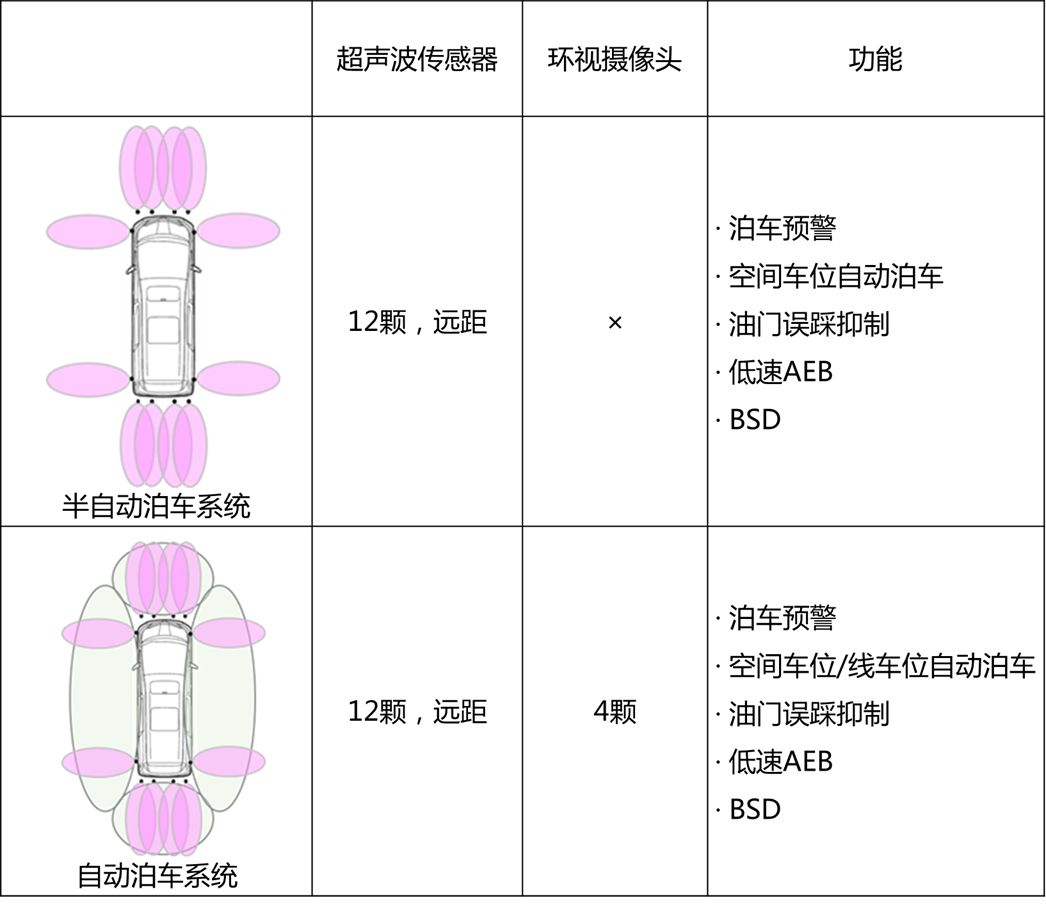
圖1平行泊車 垂直泊車 斜列式泊車 按照自動化程度等級,自動泊車可以分為: 半自動泊車 全自動泊車 半自動泊車系統為駕駛員操控車速,計算平臺根據車速及周邊環境來確定并執行轉向,對應于SAE自動駕駛級別中的L1; 全自動泊車為計算平臺根據周邊環境來確定并執行轉向和加減速等全部操作,駕駛員可在車內或車外監控,對應于SAE L2級。 按照所采用傳感器的種類,半自動/全自動泊車可以分為: 超聲波自動泊車 基于超聲波與攝像頭的融合式自動泊車 兩種傳感器的對比如表1所示: 表1
02 原理方案
敲黑板!整個泊車過程是哪幾個環節? 環境感知、停車位檢測與識別、泊車路徑規劃、泊車路徑跟隨控制以及模擬顯示五大環節! 下面我們就以最常見的超聲波自動泊車系統為例,從五大環節來介紹: ▲環境感知 如圖2所示,為一種典型的超聲波自動泊車系統的環境感知方案,由12個超聲波雷達組成。
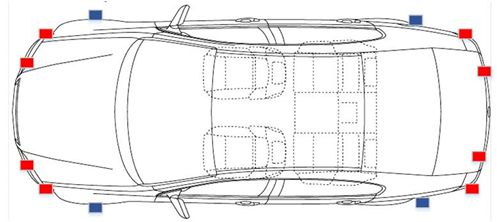
圖2 ■8個超聲波雷達:泊車過程中檢測車身周邊的障礙物,避免剮蹭 ■4個超聲波雷達:泊車開始前進行車位的探測及在泊車過程中提供側向障礙物信息 ▲停車位檢測與識別 自動泊車超聲波車位探測系統主要是由布置在車身側面的超聲測距模塊構成的, 通過超聲傳感器對車輛側面的障礙物進行探測, 即可完成車位探測及定位。 超聲波車位探測的過程如圖3 所示。在探測車位時, 車輛以某一恒定車速V平行駛向泊車位: 「1」當車輛駛過 1 號車停放的位置時,裝在車身側面的超聲波傳感器開始測量車輛與 1 號車的橫向距離 D。 「2」當車輛通過 1 號車的上邊緣時,超聲波傳感器測量的數值會有一個跳變,記錄此時時刻。 「3」車輛繼續勻速前進,當行駛在 1 號車與 2號車之間時,處理器可以求得車位的平均寬度W。 「4」當通過 2 號車下邊緣時,超聲波傳感器測量的數值又發生跳變,處理器記錄當前時刻,算得最終的車位長度L。 「5」處理器對測量的車位長度 L 和寬度 W 進行分析,判斷車位是否符合泊車基本要求并判斷車位類型。
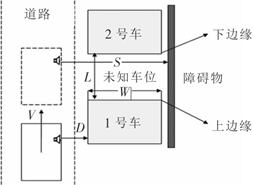
圖3 ▲泊車路徑規劃 考慮到自動泊車實現原理,泊車路徑規劃一般盡可能滿足以下要求: a.完成泊車路徑所需要的動作必須盡可能少。 因為每個動作的精度誤差會傳遞到下一個動作,動作越多,精度越差。 b.在每個動作的實施過程中,車輛的轉向輪(絕大部分為前輪)的角度需要保持一致。 因為系統是通過嵌入式系統實現的,而嵌入式系統的性能有限,轉向輪角度保持一致能夠將運動軌跡的計算歸結為幾何問題, 反之需要涉及復雜的積分問題,這對嵌入式系統的性能是一個挑戰。 一般平行泊車和垂直泊車采用如圖4和5所示路徑。 平行泊車分為單次和多次: 單次為如圖4所示路徑一次泊車完成; 多次則為當車位長度比較小時,可采用多次“揉庫”的方法泊車。
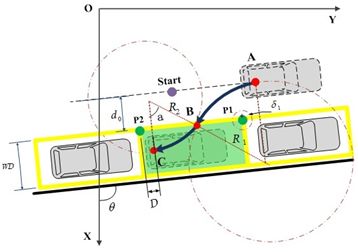
圖4
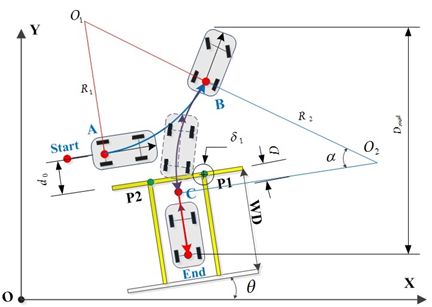
圖5 ▲泊車路徑跟隨控制該過程為通過車載傳感器不斷探測環境,實時估算車輛位置,實際運行路徑與理想路徑對比,必要時做局部校正。 ▲模擬顯示由傳感器反饋構建泊車模擬環境,具有提示與交互作用。提示用戶處理器意圖以及做必要的操作。 另外,路徑規劃后進行泊車時為了知曉處理器定位和計算路徑運行情況,需要將這些處理器信息反饋給用戶。 如果處理器獲取環境信息或者處理過程中出現重大錯誤,用戶可以及時知曉與停止。 自主泊車系統
01定義
隨著自動駕駛技術的發展,自動泊車逐漸往自主泊車方向演進。 自主泊車又稱為代客泊車或一鍵泊車: 指駕駛員可以在指定地點處召喚停車位上的車輛,或讓當前駕駛的車輛停入指定或隨機的停車位。 整個過程正常狀態下無需人員操作和監管,對應于SAE L3級別。 自主泊車系統包含兩個功能,即泊車與喚車: >>>>泊車功能 是指用戶通過車載中控大屏或手機APP選定在園區、住宅區等半封閉區域內的停車位或者選定停車場(有高精地圖覆蓋) 然后車輛通過獲取園區、住宅區等半封閉道路上的車道線、道路交通標志、周圍其他車輛等交通環境、參與者信息; 控制車輛的油門、轉向、制動來實現安全自動駕駛,并通過自動尋找可用停車位或識別用戶選定停車位; 實現自動泊入、自動停車、掛P檔、熄火、鎖車門,同時防止潛在的碰撞危險的功能。 >>>>喚車功能 是指用戶通過手機APP選定園區、住宅區等半封閉區域內的某一喚車點, 然后車輛從停車位自動泊出、低速自動駕駛到達喚車點, 從而實現喚車,同時防止潛在的碰撞危險的功能。
02 原理方案
按主要技術路線,自主泊車系統可分為: 偏車端方案 偏場端方案 車端場端并重方案 偏車端和偏場端的自主泊車方案對比如圖6所示:
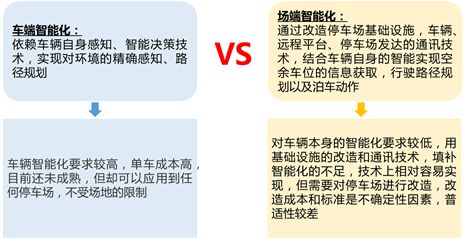
圖6 偏車端自主泊車系統方案:典型的偏車端自主泊車系統的組成見以下圖7和表2:
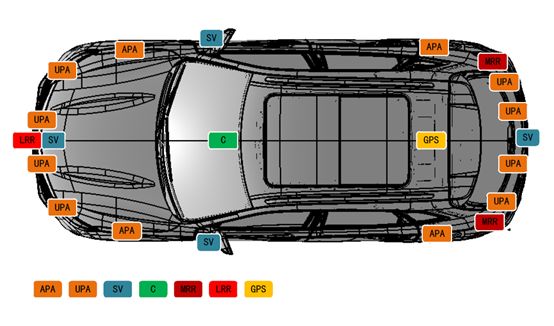
圖7 表2主要傳感器信息

偏車端方案的系統邏輯流程圖見下圖8: 由圖可知,偏車端方案主要借助車載傳感器對周圍環境以及自身狀態的感知來決策并執行車輛動作,并在必要時提醒用戶進行車內或遠程接管操控。
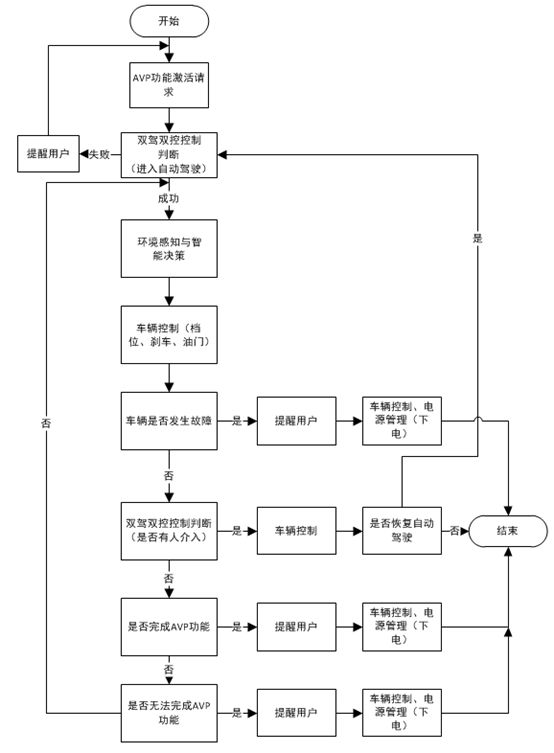
圖8 偏場端自主泊車系統方案:圖9為一種偏場端方案的系統示意圖: ◤在停車場內布置激光雷達或雙目攝像頭來實現對車輛狀態及周邊環境的監控,通過預埋式停車場傳感器探測當前占用狀態。 所有傳感器數據均在數據中心進行匯總分析,根據儲存的元信息(如停車位尺寸、費用、諸如殘疾人停車位等的特殊情況等)完成匹配。 數據中心根據這所有的信息實時生成停車地圖。 駕駛員通過智能手機APP接收所有的信息,從而始終能了解最近可用停車位的概況,以及所有相關詳情,如距離和價格。 而車輛只需要具備與停車場設施的通信能力和可控的底盤執行系統,即可在場端的輔助下完成自主泊車。◢
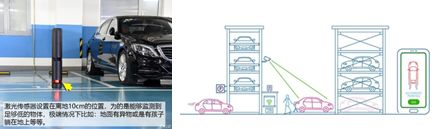
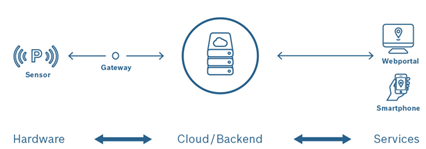
圖9
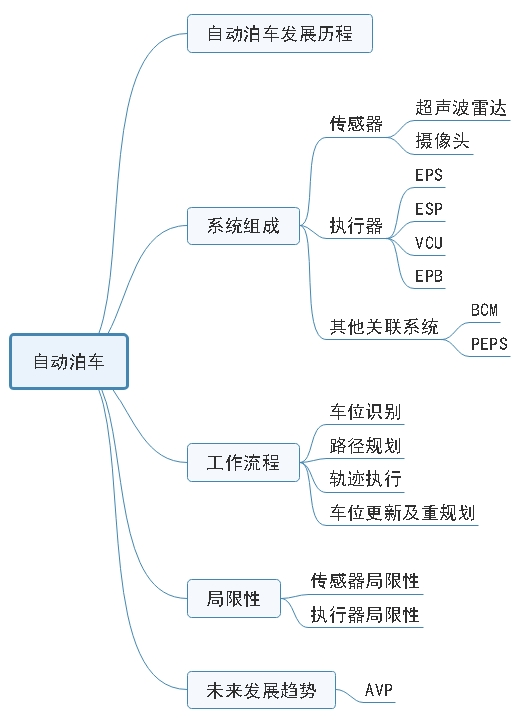
03 自動泊車系統
自動泊車系統組成及功能如表4所示: 表4
04自主泊車系統
自主泊車系統方案如圖11所示,主要采用智能化車端+智能化場端的方式。 車端智能化主要依賴于融合式全自動泊車的傳感器配置,外加前視攝像頭、V2X設備等實現特定區域內的點到點自動駕駛、自動車位掃描、自動泊入泊出等功能。 車輛自身具備車輛、行人等動態障礙物檢測和識別功能,可實現自動緊急制動、避障等決策規劃。 場端智能化主要依托攝像頭檢測技術,實現停車場車位占用情況檢測,并上傳至停車場服務器,并實現為自主泊車車輛提前分配車位信息。
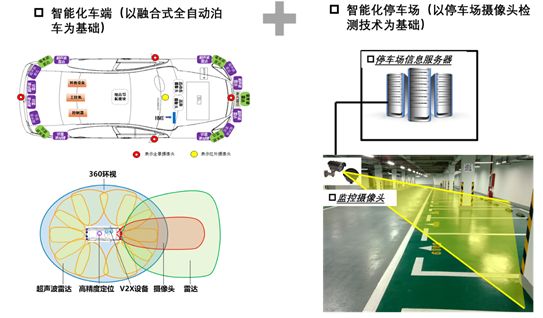
圖11 ▲障礙物坐標檢測及多目標識別 超聲波傳感器單純的距離檢測能力在泊車預警輔助場景已可滿足使用要求,但是在智能化泊車應用場景、及多傳感器融合應用中還遠遠不夠。 為此開發了障礙物坐標檢測技術及多目標識別技術,如圖12和圖13所示:
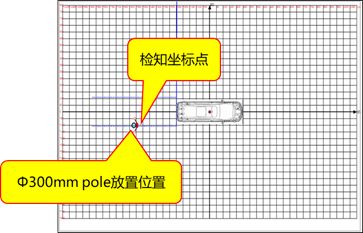
圖12
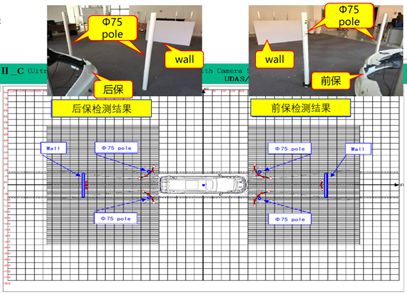
圖13 ▲高精度車位檢測及車位融合 基于超聲波傳感器可實現空間車位的探測、360環視攝像頭可實現線車位的檢測。 同時結合超聲波傳感器及環視攝像頭的障礙物信息檢測,對車位進行多層次的融合,實現泊車位的高精度檢測,大大提升了泊車場景的覆蓋范圍。如圖14所示:

圖14 ▲軌跡動態規劃技術 泊車過程中有諸多不可控因素,如轉向系統執行速度與精度問題、參考障礙物位置變動問題等,導致在泊車過程中出現泊車軌跡偏離路徑規劃軌跡現象。 為此開發了泊車軌跡動態規劃技術,可實現泊車過程中的軌跡實時修正甚至軌跡重規劃,如圖15所示:
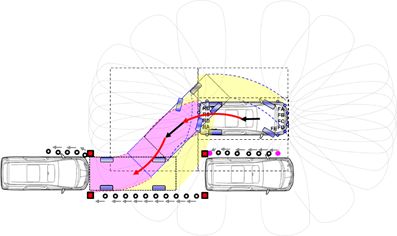
圖15 ▲室內定位技術 如圖16所示,通過采用視覺SLAM+標簽輔助定位方式,解決地下停車場無GPS的問題,同時通過多源信息融合,提升定位精度。(劃重點,做筆記。)
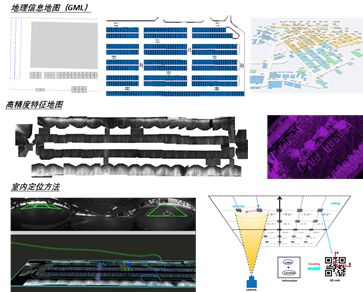
圖16 ▲基于視覺的停車場車位狀態檢測技術 如圖17所示,通過停車場安裝的監控攝像頭,基于深度學習算法,實現車位占用狀態的實時檢測,并將此信息上傳至停車場車位管理后臺服務器,為自主泊車車輛提供可泊車位信息。
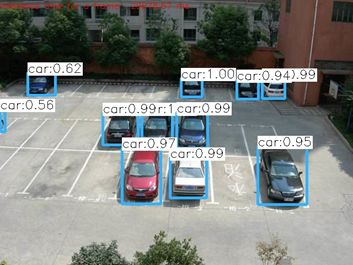
圖17 ▲全局與局部路徑規劃技術 如圖18所示,基于A*算法實現任意兩點間的全局路徑規劃,支持路徑規劃重置、選路以及速度規劃功能,同時結合實時環境感知狀態,進行局部路徑規劃,實現緊急制動、 跟車巡航以及換道避讓、 換道超車等自主決策。
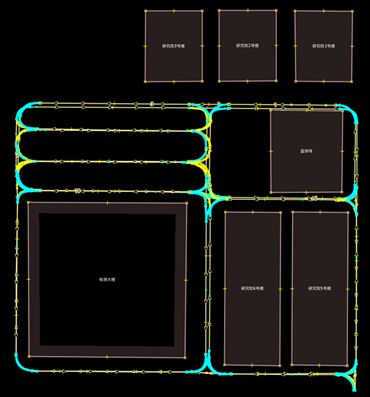
圖18 總結一下 泊車場景作為用戶痛點感受最深,技術實現相對容易,客戶最愿買單且最有機會率先落地的場景,是乘用車L4自動駕駛企業兵家必爭之地。 之前看過一篇文章,里面列舉了汽車十大最沒用的配置,自動泊車位列其中。而隨著自動泊車從半自動到全自動發展,我們看到了自動泊車作為低速自動駕駛更多的閃光點。自動泊車也逐漸從“雞肋”變成了“真香”。
審核編輯 :李倩
-
控制系統
+關注
關注
41文章
6634瀏覽量
110682 -
智能化
+關注
關注
15文章
4899瀏覽量
55493 -
自動駕駛
+關注
關注
784文章
13863瀏覽量
166590
原文標題:低速自動駕駛技術:APA
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些應用?
谷歌的自動駕駛汽車是醬紫實現的嗎?
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
細說關于自動駕駛那些事兒
自動駕駛的到來
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
UWB主動定位系統在自動駕駛中的應用實踐
自動駕駛汽車的定位技術
如何讓自動駕駛更加安全?
聯網安全接受度成自動駕駛的關鍵
自動駕駛系統設計及應用的相關資料分享
自動駕駛技術的實現
一文聊聊低速自動駕駛和高速自動駕駛





 工商網監
工商網監
評論