") STM32+ULN2003驅動28BYJ4步進電機(正反轉)
STM32+ULN2003驅動28BYJ4步進電機(正反轉)
?
一、環(huán)境介紹
二、硬件介紹
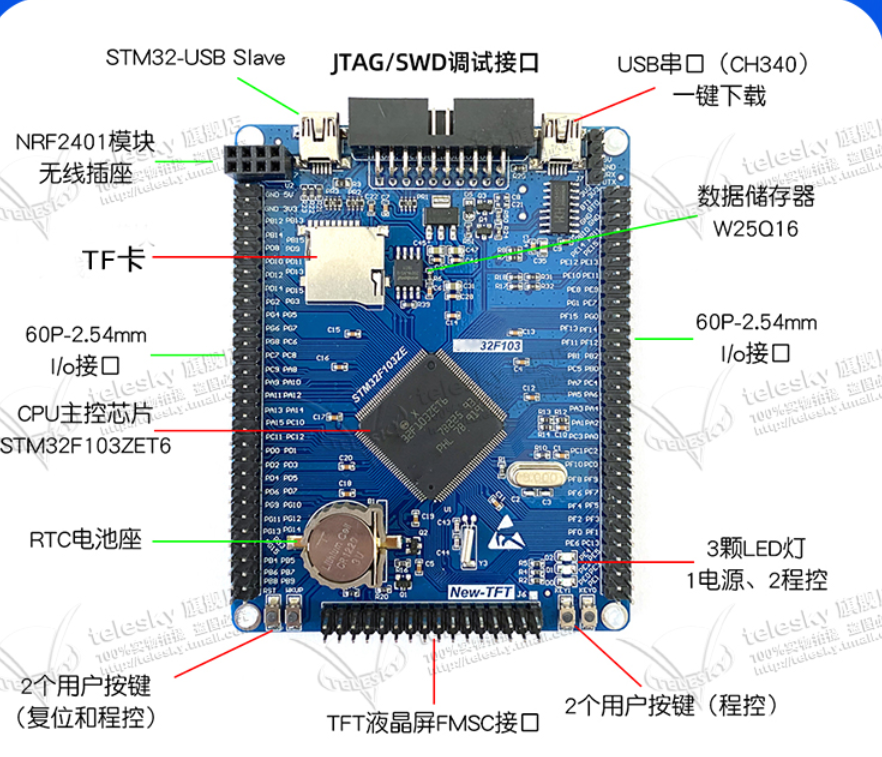
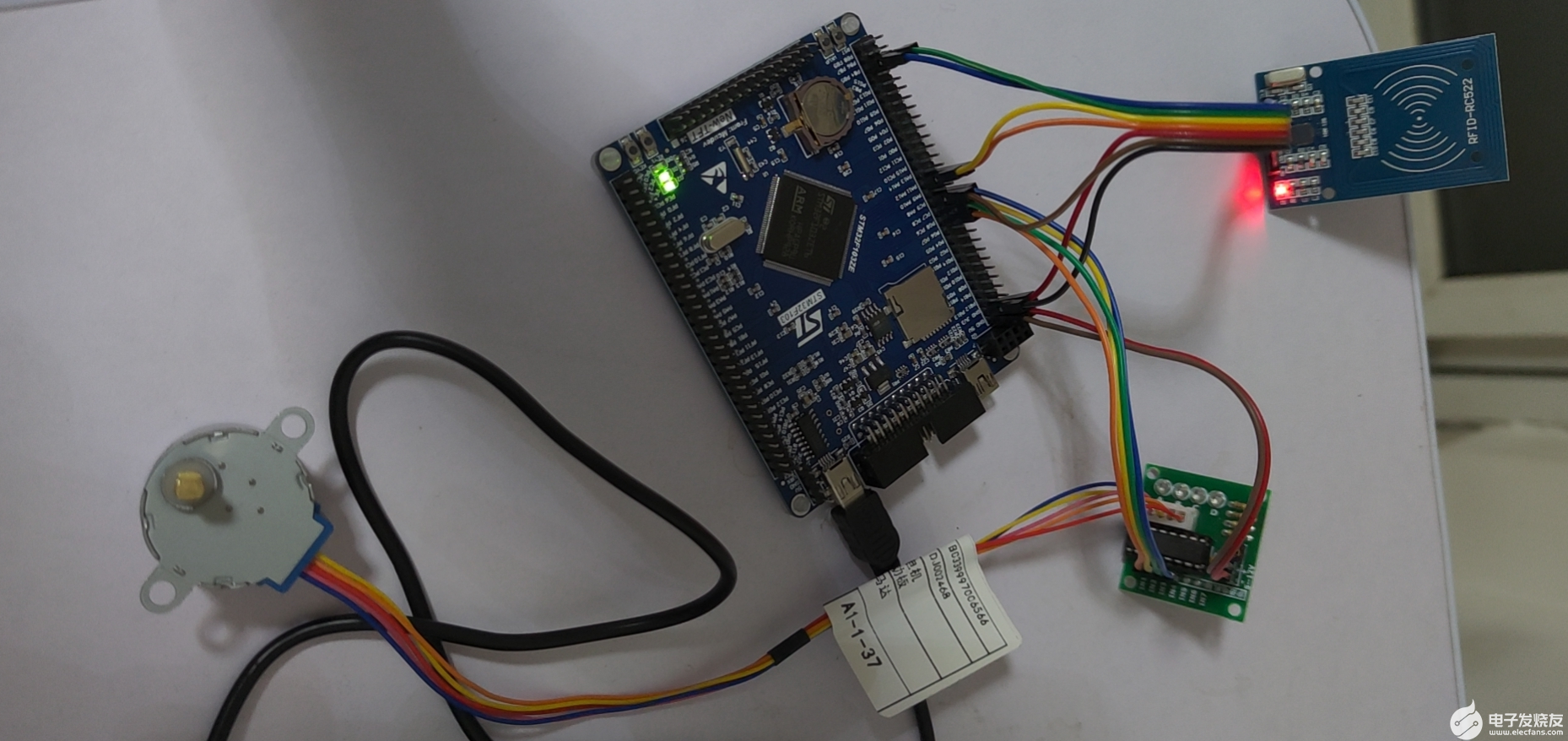
開發(fā)板采用STM32F103ZET6 最小系統(tǒng)板

?
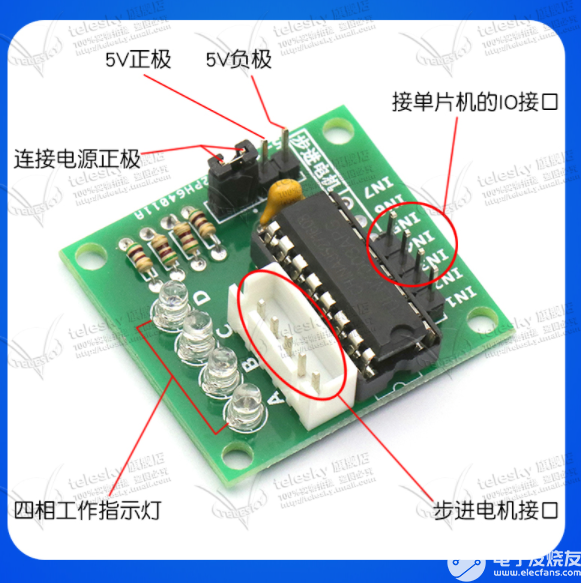
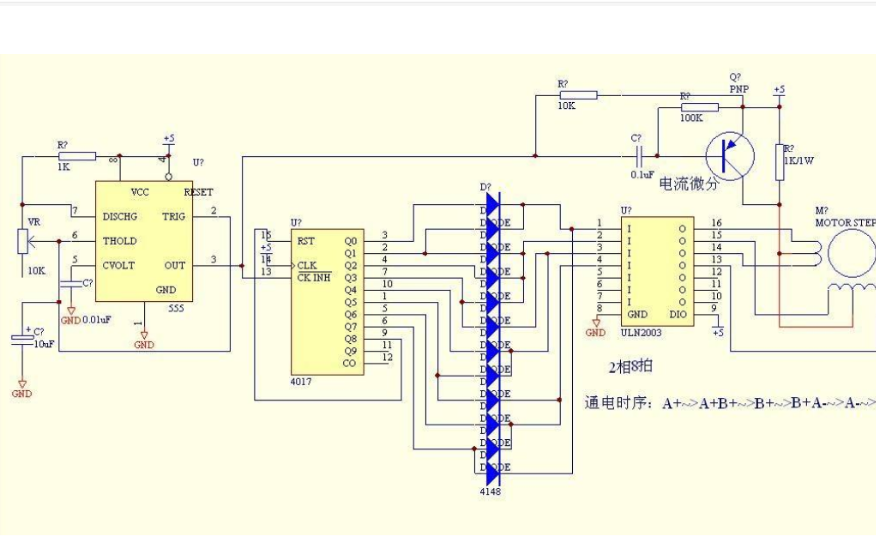
電機驅動板采用的是ULN2003
?
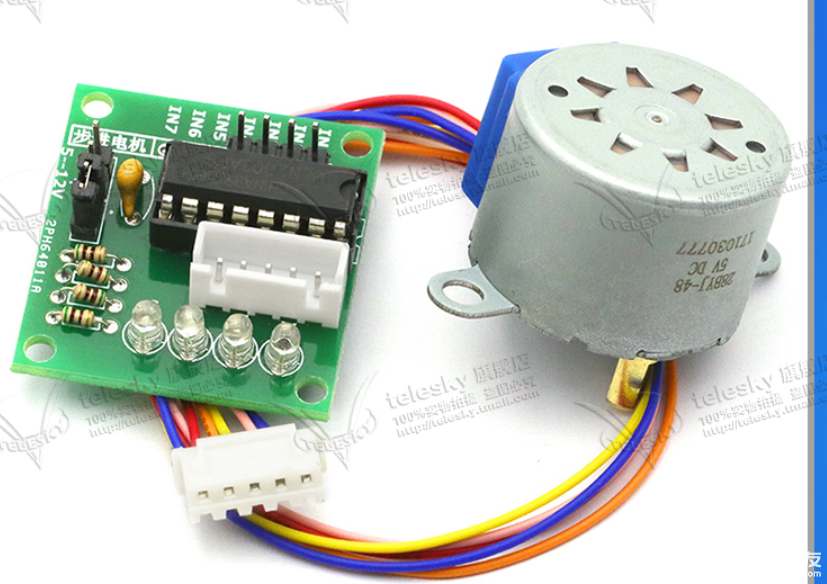
步進電機采用的是28BYJ4 (5V 4相5線步進電機)

?
?
三、驅動代碼
?
3.1 motor.c
#include "motor.h"
//步進電機正反轉數(shù)組1
u16 PositiveSequence[4] ={0x0200,0x0100,0x0080,0x0040};// D-C-B-A
u16 ReverseOrder[4]={0x0040,0x0080,0x0100,0x0200};// A-B-C-D.
void motor_delay_ms(u32 ms)
{
u32 i,j;
for(i=0;iAPB2ENR|=1<<4;
GPIOC->CRL&=0x00FFFFFF;
GPIOC->CRL|=0x33000000;
GPIOC->CRH&=0xFFFFFF00;
GPIOC->CRH|=0x00000033;
// IN4: PC9 d
// IN3: PC8 c
// IN2: PC7 b
// IN1: PC6 a
}
void GPIO_Write(GPIO_TypeDef* GPIOx, u16 PortVal)
{
GPIOx->ODR = PortVal;
}
void motor_just(int speed) //一個脈沖
{
uint8_t i;
for(i=0;i<4;i++)
{
GPIO_Write(GPIOC,PositiveSequence[i]);
motor_delay_ms(speed);
}
}
void motor_back(int speed)
{
uint8_t i;
for(i=0;i<4;i++)
{
GPIO_Write(GPIOC,ReverseOrder[i]);
motor_delay_ms(speed);
}
}
//由于 *一個脈沖* *輸出軸* 轉0.08789度(電機實轉0.08789*64=5.625度),即步進角為5.625度。則轉完A-B-C-D為 *8個脈沖*
//,即0.08789*8=0.70312度。若稱A-B-C-D為一個周期,則j為需要的轉完angle角度所需的周期數(shù)。
//步進電機正轉角度函數(shù)
void motor_just_angle(int angle,int speed)
{
int i,j;
j=(int)(angle/0.70312);
for(i=0;i;i++)>;i++)>
3.2 motor.h
#ifndef _MOTOR_H
#define _MOTOR_H
#include "sys.h"
void motor_delay_ms(u32 x);//延時函數(shù)
void motor_init(void); //步進電機初始化
void motor_just(int speed); //步進電機正轉函數(shù)
void motor_back(int speed); //步進電機反轉函數(shù)
void motor_just_angle(int angle,int speed); //步進電機正轉角度函數(shù)
void motor_back_angle(int angle,int speed); //步進電機反轉角度函數(shù)
void motor_stop(void); //步進電機停止函數(shù)
void motor_just_circle(int ring ,int speed); //步進電機正轉圈函數(shù)
void motor_back_circle(int ring ,int speed);//步進電機反轉圈函數(shù)
//IN
#define MOTOR_1 PCout(6)
#define MOTOR_2 PCout(7)
#define MOTOR_3 PCout(8)
#define MOTOR_4 PCout(9)
#endif
3.3 main.c
/*
ULN2003控制28BYJ-48步進電機接線:
ULN2003接線:
IN4: PC9 d
IN3: PC8 c
IN2: PC7 b
IN1: PC6 a
+ : 5V
- : GND
*/
int main()
{
u8 time_cnt=0;
u8 key;
LED_Init();
KEY_Init();
USART1_Init(115200);
motor_init(); //步進電機初始化
USART1_Printf("程序初始化.....\r\n");
while(1)
{
//按鍵可以測試開鎖和關鎖
key=KEY_Scan(0);
if(key==1)
{
LED1=0; //亮燈--表示開鎖
motor_just_circle(1,300); //電機正轉1圈
}
else if(key==2)
{
LED1=1; //滅燈--表示關鎖
motor_back_circle(1,300); //電機反轉1圈
}
DelayMs(10);
time_cnt++;
if(time_cnt>=50)
{
time_cnt=0;
LED2=!LED2;
}
}
}
?
審核編輯:湯梓紅
?
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
STM32
+關注
關注
2270文章
10904瀏覽量
356411 -
硬件
+關注
關注
11文章
3341瀏覽量
66270 -
步進電機
+關注
關注
150文章
3112瀏覽量
147559
發(fā)布評論請先 登錄
相關推薦
STM32+ULN2003驅動28BYJ4步進電機的驅動代碼是什么?
STM32+ULN2003驅動28BYJ4步進電機的硬件有哪些?STM32+ULN2003
發(fā)表于 06-29 08:53
STM32+ULN2003驅動28BYJ4步進電機相關資料分享
一、環(huán)境介紹MCU: STM32F103ZET6編程軟件: Keil5二、硬件介紹開發(fā)板采用STM32F103ZET6 最小系統(tǒng)板電機驅動板采用的是
發(fā)表于 06-29 06:15
STM8S103F3P6+步進電機28BYJ-48+ULN2003實現(xiàn)簡單的正反轉demo
STM32F103+步進電機28BYJ-48+ULN2003 實現(xiàn)簡單的正反轉demo這篇文章的拓展,針對此文章的程序
發(fā)表于 06-29 07:16
Arduino,ULN2003和28YJ-48步進電機執(zhí)行控制 相關資料下載
使用ULN2003驅動板和Arduino控制28BYJ-48步進電機的所有信息。我提供了數(shù)據(jù)表,接線圖和許多示例代碼!在每個示例之后,我都會
發(fā)表于 07-08 09:26
如何根據(jù)STM32F103+步進電機28BYJ-48+ULN2003實現(xiàn)簡單的正反轉?
如何根據(jù)STM32F103+步進電機28BYJ-48+ULN2003實現(xiàn)簡單的正反轉?
發(fā)表于 10-15 07:57
STM32F103+步進電機28BYJ-48+ULN2003如何實現(xiàn)簡單的正反轉?
STM32F103+步進電機28BYJ-48+ULN2003如何實現(xiàn)簡單的正反轉?
發(fā)表于 10-15 09:15
ULN2003驅動28BYJ48步進電機STM32F103版庫函數(shù)合集免費下載
ULN2003驅動28BYJ48步進電機STM32F103版庫函數(shù)合集免費下載
發(fā)表于 03-10 08:00
?0次下載
STM32+ULN2003驅動28BYJ4步進電機(根據(jù)圈數(shù)正轉、反轉)
一、環(huán)境介紹MCU: STM32F103ZET6編程軟件: Keil5二、硬件介紹開發(fā)板采用STM32F103ZET6 最小系統(tǒng)板電機驅動板采用的是
發(fā)表于 12-05 19:21
?47次下載

STM8S103F3P6+步進電機28BYJ-48+ULN2003 實現(xiàn)簡單的正反轉demo
STM32F103+步進電機28BYJ-48+ULN2003 實現(xiàn)簡單的正反轉demo這篇文章的拓展,針對此文章的程序
發(fā)表于 12-27 18:28
?24次下載
STM32F103RCT6利用ULN2003驅動步進電機正反轉
接通電源后,電機開始正轉,轉夠一圈后,電機開始反轉,同時在OLED上會顯示forward和reverse分別表示正反轉
器件 :STM32
發(fā)表于 03-24 09:55
?13次下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論