 詳解卡爾曼濾波器的工作原理
詳解卡爾曼濾波器的工作原理
原理
卡爾曼濾波器是一種基礎預測定位算法。原理非常簡單易懂。核心過程可以用一個圖說明:
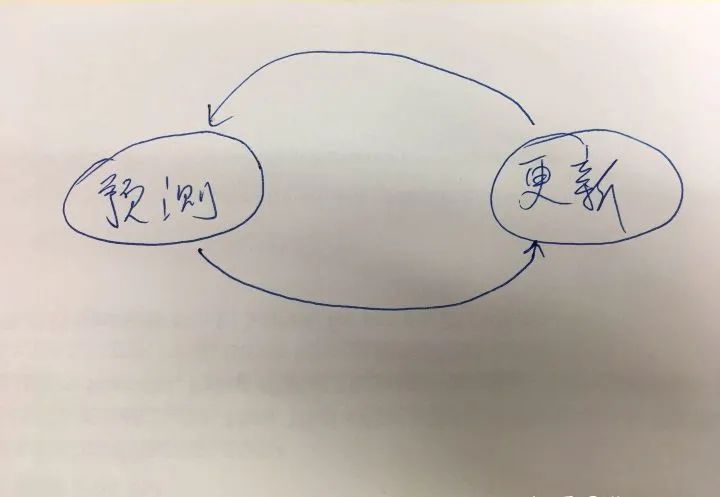
本質上就是這兩個狀態過程的迭代,來逐步的準確定位。
預測:當前狀態環境下,對下一個時間段t的位置估計計算的值。
更新:更具傳感器獲取到比較準確的位置信息后來更新當前的預測問位置,也就是糾正預測的錯誤。
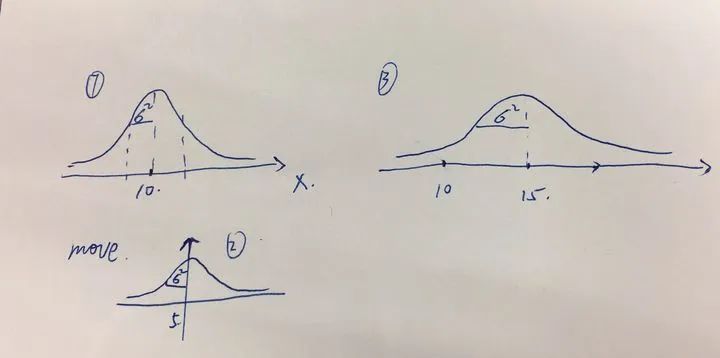
你可能要問為什么有傳感器的數據了還要進行更新?因為在現實世界中傳感器是存在很多噪聲干擾的,所以也不能完全相信傳感器數據。卡爾曼算法依賴于線性計算,高斯分布,我們以一維定位來介紹算法的實現。

接下來我們開更新,預測后我們獲取到傳感器數據,表示目前傳感器發現小車的位置應該是在26這個位置,在這種情況下,我們肯定是覺得傳感器的準確度比我之前的預測瞎猜要來的準確。
所以方差自然會比較小,最終我們覺得真是的小車位置應該是更靠近傳感器數據的,而且方差會縮小,以至于,想想也很清楚,我猜了一個預測值,現在有個專家告訴了我相對比較靠譜的數據,那我對小車的位置的自信度肯定會上升啊。
最終小車的位置經過這個時間段t的更新就是下圖紅色的高斯圖:
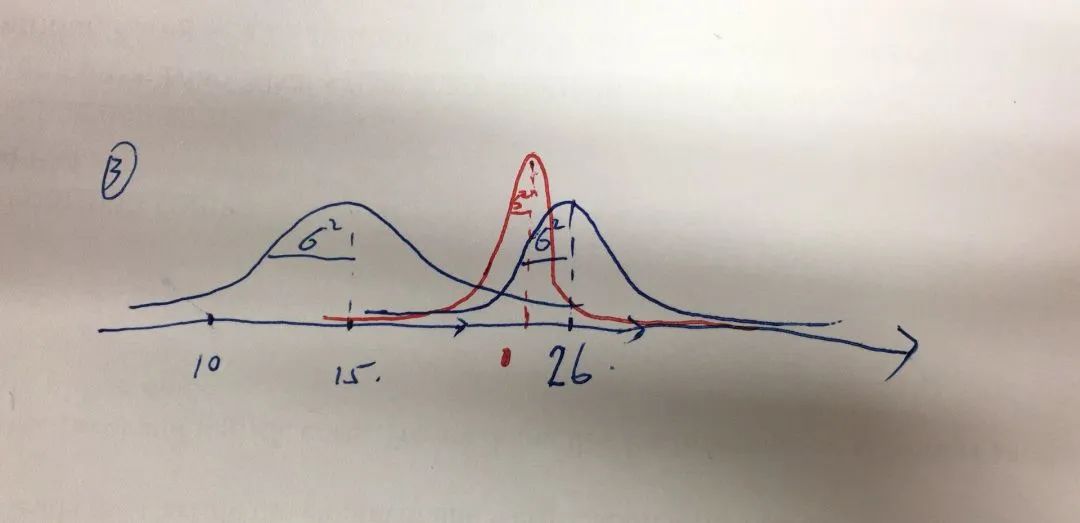
就這樣不停的移動更新,最終小車的位置就會越來越準確。
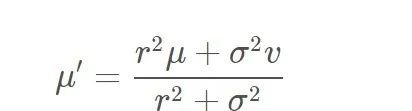
一維模型下的Kalman公式:
預測

更新

參考代碼:
using namespace std;double new_mean, new_var;tuple<double, double> measurement_update(double mean1, double var1, double mean2, double var2){new_mean = (var2 * mean1 + var1 * mean2) / (var1 + var2);new_var = 1 / (1 / var1 + 1 / var2);return make_tuple(new_mean, new_var);}tuple<double, double> state_prediction(double mean1, double var1, double mean2, double var2){new_mean = mean1 + mean2;new_var = var1 + var2;return make_tuple(new_mean, new_var);}int main(){//Measurements and measurement variancedouble measurements[5] = { 5, 6, 7, 9, 10 };double measurement_sig = 4;//Motions and motion variancedouble motion[5] = { 1, 1, 2, 1, 1 };double motion_sig = 2;//Initial statedouble mu = 0;double sig = 1000;for (int i = 0; i < sizeof(measurements) / sizeof(measurements[0]); i++) {tie(mu, sig) = measurement_update(mu, sig, measurements[i], measurement_sig);printf("update: [%f, %f] ", mu, sig);tie(mu, sig) = state_prediction(mu, sig, motion[i], motion_sig);printf("predict: [%f, %f] ", mu, sig);}return 0;}
原文標題:基礎卡爾曼濾波
文章出處:【微信公眾號:機器視覺智能檢測】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
濾波器
+關注
關注
161文章
7795瀏覽量
177996 -
算法
+關注
關注
23文章
4607瀏覽量
92840 -
原理
+關注
關注
4文章
550瀏覽量
44891
發布評論請先 登錄
相關推薦
卡爾曼濾波器是什么

詳細了解卡爾曼濾波器的工作原理

如何理解卡爾曼濾波器?卡爾曼濾波器狀態方程及測量方程

卡爾曼濾波器的特性及仿真






 工商網監
工商網監
評論