 PTP測量指標與PTP同步系統檢測方法
PTP測量指標與PTP同步系統檢測方法
王辰生
書接上文,前幾期我們介紹了IP測試工具和IP測量的思路,接下來三期就將基于項目中實際面對IP系統的測量經驗和實踐,針對性的介紹IP測量的實踐內容。本期主要介紹PTP測量的相關內容。本文旨在交流探討,如有不足,還請各位指正。
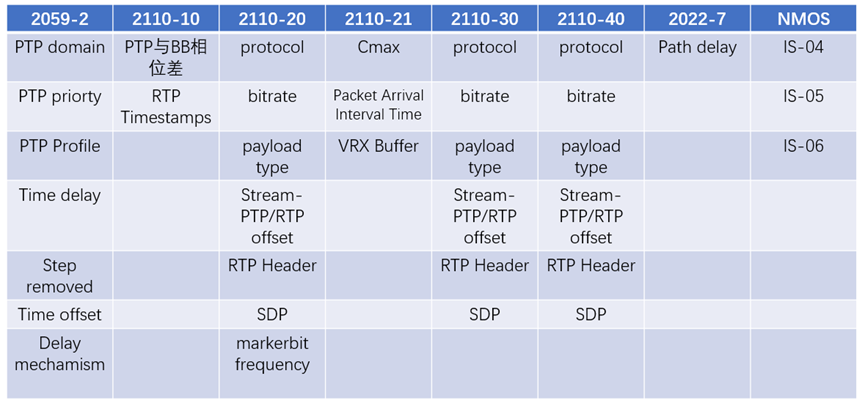
表4 基于標準/協議的測量指標
首先,我們還是從這張表來看,根據我們測量的內容,簡單的把這些檢測項分成4個大類,分別是:
1PTP同步的相關檢測,主要涉及2059-2標準以及2110-10標準的一部分;
2流特征的檢測,包含2110-10的部分,以及2110-20,-30,-40標準;
3傳輸特性的相關檢測,主要有2110-21的流量整形檢測和2022-7的冗余傳輸檢測;
4控制方面的檢測,涉及NMOS系列的標準,如IS-04,IS-05等。
根據我們的經驗,目前階段我們根據測量值將指標類型分為三種,分別是有明確標準值指標,有建議值或參考值指標,無規定值指標。建議值指標和無規定的指標只能作為定性分析的判斷依據,無法作為判斷信號是否合格的指標。
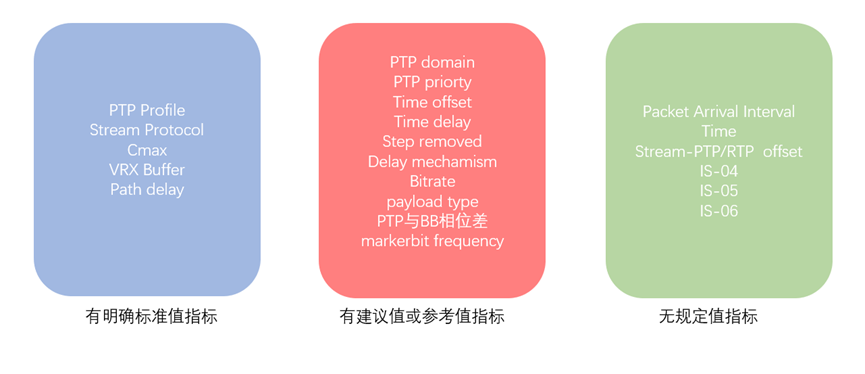
圖30 參考值指標分類
一、PTP測量指標
同步是系統的基石,同步系統的穩定性直接關系到了整個系統的正常運行。這一部分主要涉及的標準是SMPTE 2110-10以及SMPTE 2059 。SMPTE在 2015年針對廣電行業IP視音頻傳輸特性,制定了基于IEEE 1588的ST2059標準。SMPTE 2059-1主要描述了以下技術:
SMPTE提出了自己的計時原點(SMPTE Epoch:1970.01.01.0000)
定義了信號與時間原點校準對齊的算法
定義了通過1588計算時間碼(LTC,VITC)的算法
SMPTE 2059-2則是在IEEE 1588協議基礎上,針對廣播電視應用的特點,定義了ST2059 profile。在ST2110系列標準中,ST2110-10詳細描述了ST2059如何在ST2110系統中應用。
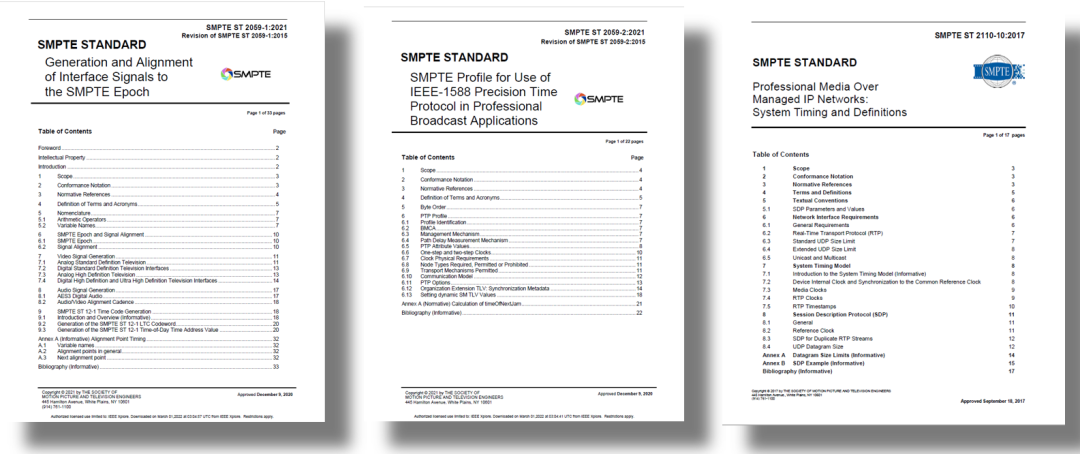
圖31 SMPTE標準
在2019年和2021年,IEEE 1588和SMPTE 2059標準均有更新,新的標準中厘清了算法,允許announce報文的默認速率調整為1秒鐘發送1次,增加了安全性和更多能被監控的特性,并修改了一些叫法,如將“master”改為“leader”,“slave”改為“follower”,例如主時鐘“master clock”變為“leader clock”。下圖簡單列出了新的變化。
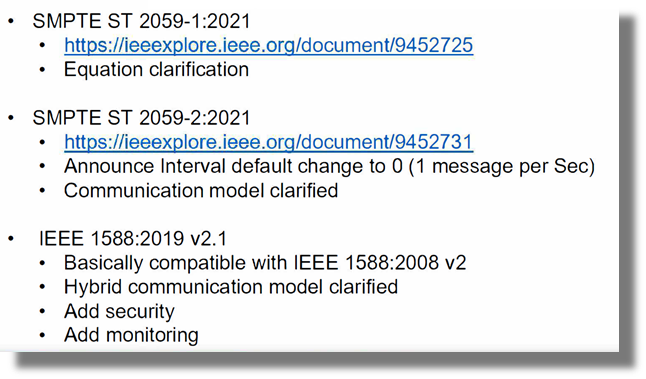
圖32 標準變化
梳理標準,結合實戰,匯總以下測量內容。
圖33 PTP的測量
首先我們需要梳理系統中PTP的測量思路,根據系統的情況,需要提前確認和設定系統的GM,domain,PTP profile,使用廠家建議的message rate,最終檢查設備被鎖定的狀態。根據這一思路,我們梳理出以下測試內容:
PTP status
Domain
BMCA
Message Rate和PTP Profile
Time offset和Time delay
PTP與BB相位差
下面我們將詳細介紹這些測試內容。
1. PTP status
首先第一項是PTP status,這一項很簡單,就是系統中的從屬設備自我判斷是否鎖住了PTP,我們可以在示波器上直接進行檢查。顯示結果一般有以下三種情況,分別是locked,locking,unlock。
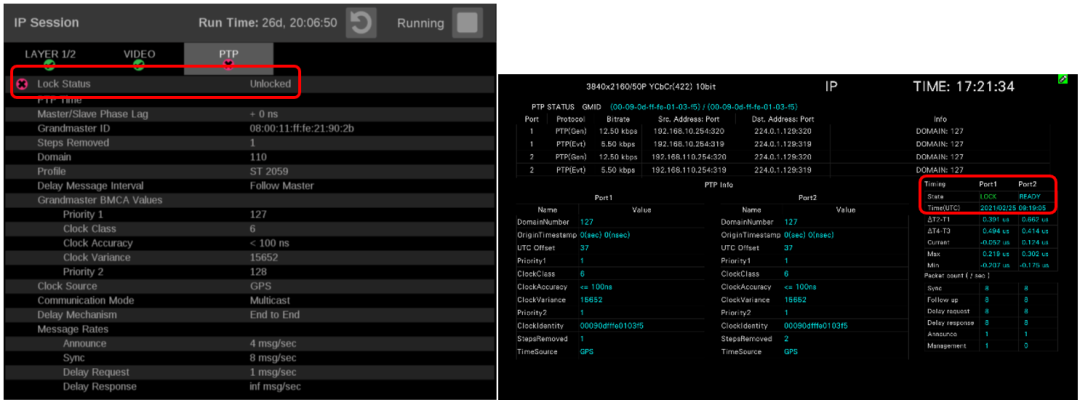
圖34 示波器PTP狀態截圖
2. GMID or Grandmaster ID
GMID就是顯示當前鎖定的grandmaster的mac地址(中間插入ff:fe字節),我們可以直接通過GMID來判斷當前設備鎖定在系統中的哪個時鐘上。當主備鏈路都鎖定完成時,GMID會有兩個地址,如果都鎖定到一臺同步機上,那么地址會相同。
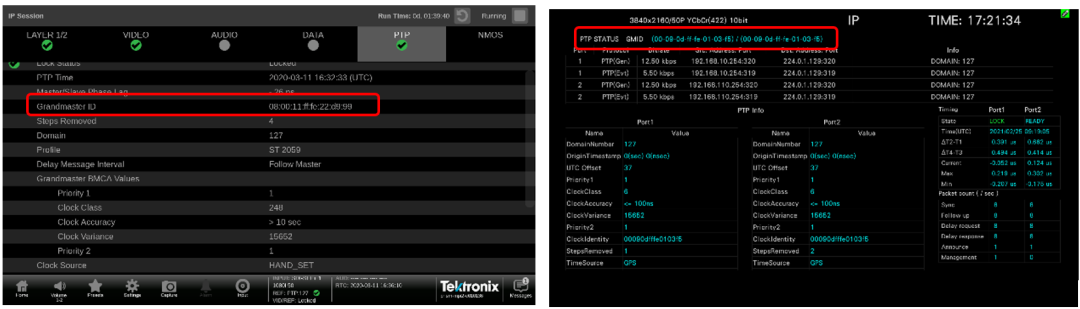
圖35 示波器GMID截圖
3. Domain
接著是domain的檢查,這項值是在同步機以及交換機上設定的,通過讀取數值,來判斷從設備是否鎖定在我們所設定的同步域中。我們在系統設計時就需要確認系統使用的domain,之后在同步機、交換機上做相應的設定,最后我們的測試設備在測量時讀到的domain值與設定一致即為正確。索尼系統的domain值一般為127。
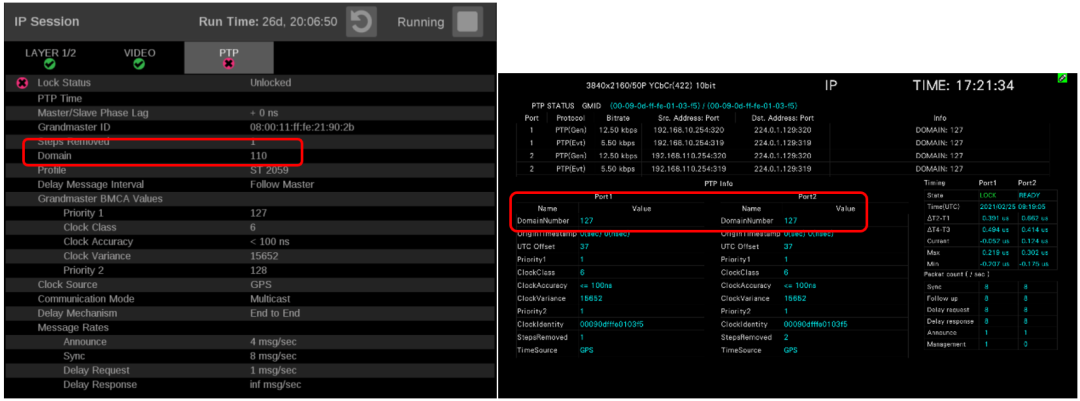
圖36 示波器Domain截圖
4. BMCA
接著是BMCA(最佳主時鐘算法)的檢測,BMCA本質雖然只是個算法,但是其需要借多項報文值來對優先級進行判斷。我們經常需要檢查的項有priority 1,clock class,以及priority 2這幾項,這些值能夠直觀的反應目前鎖定時鐘的級別,以及系統鎖定在哪臺時鐘上。
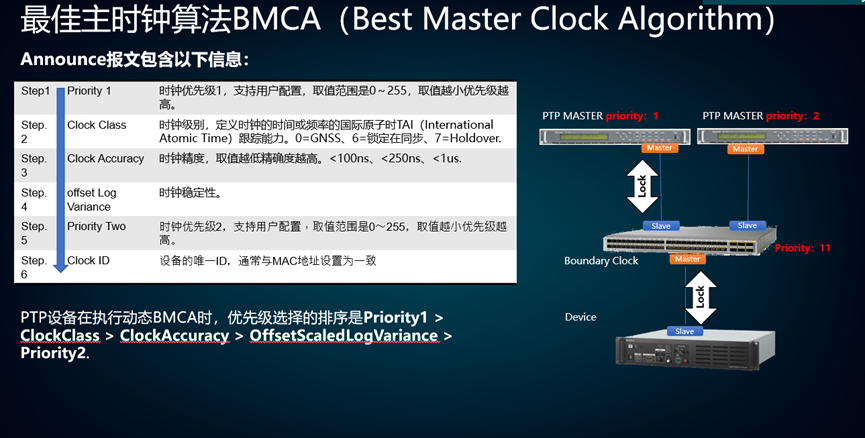
圖37 BMCA算法
priority 1:時鐘優先級1,支持用戶配置,取值范圍是0~255,取值越小優先級越高。
Clock Class:時鐘級別,定義時鐘的時間或頻率的國際原子時TAI(International Atomic Time)跟蹤能力。0=GNSS、6=鎖定在同步、7=Holdover.
Clock Accuracy:時鐘精度,取值越低精確度越高。<100ns、<250ns、<1us.
offset Log Variance:時鐘穩定性,數值越小表示時鐘約穩定。
Priority 2:時鐘優先級2,支持用戶配置,取值范圍是0~255,取值越小優先級越高。
Clock ID:設備的唯一ID,通常與MAC地址設置一致
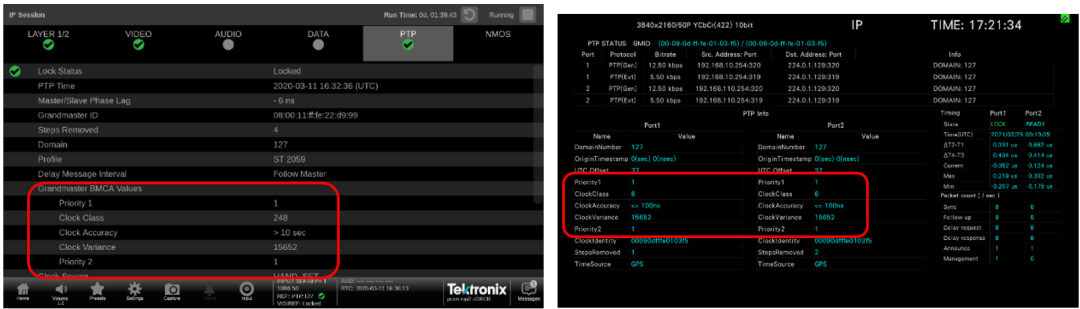
圖38 示波器BMCA信息截圖
5. Message rates和PTP Profile
下一個需要查看的指標是message rates,而message rates中的數值受到PTP Profile的影響,不同的Profile規定,有不同的數值,如下圖顯示,一般都是以每秒多少個報文來計數的。索尼IP Live系統中規定的報文速率可參考下圖。
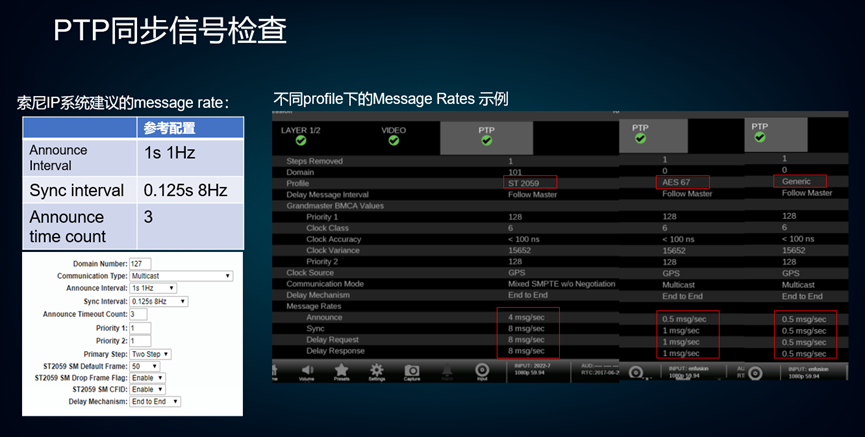
圖39 索尼IP Live系統的message rates
有些Profile對于每秒中報文數量容忍范圍較大,如果報文速率低于規定值,可能是網絡中或主時鐘存在問題。
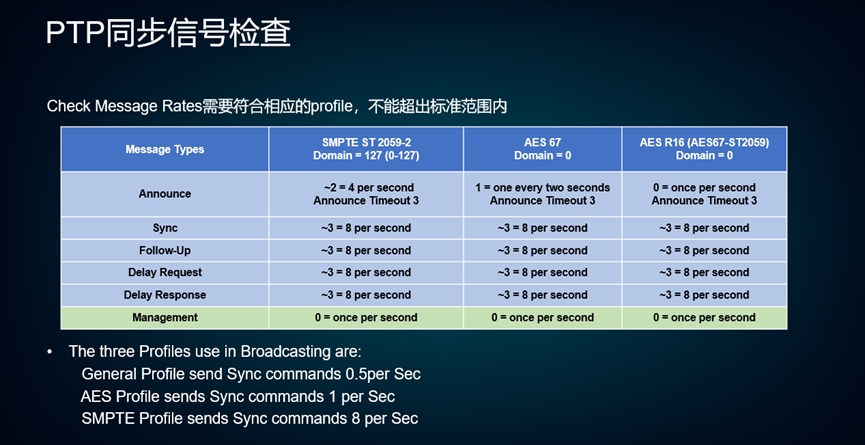
圖40 不同profile的message rates
Message rate一般由6組報文來構成,分別是:
Announce:從主時鐘收到的announce報文信息的速率,announce報文含有BMCA信息用來評估最佳時鐘。一般是每秒1到4條信息。
Sync:顯示從主時鐘收到的同步信息(Sync)的速率。Sync報文用于測量從主站到從站的傳播延遲,sync報文包含t1時間戳,當從設備收到sync報文后會標記t2,并計算延遲。
Follow-up:主設備發送完sync報文后,會發送一個帶有t1信息的follow-up報文來給從時鐘。
Delay Request:從設備發出的Delay Request報文,用來標記t3,主設備通過這個報文來計算出t4.
Delay Response:Delay Response是從主設備發出的,包含t4時間戳,從設備收到后計算t4-t3延遲量
Management:傳輸用于管理時鐘設備的的信息以及命令,目前2110系統中的profile不發生management報文。
6. Time offset和Time delay
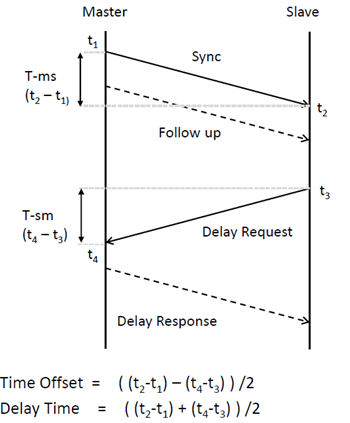
圖41 Time offset和Delay time示意
Time offset用來修正主、從時鐘的時間差,同時也可以判斷從設備是否鎖定PTP。ST2059-2標準規定:同一時刻任意兩個slave device(從設備)的時間差在1us(即1000ns)之內時,則認為系統實現同步,示波器常用1us(即1000ns)作為offset最大絕對值,以判斷示波器自身是否鎖定上PTP。
可以看出標準描述的是整個系統的同步,但是在實際系統中無法直接測量同一時刻所有slave設備的offset,因此示波器常用1us(即1000ns)作為自身offset的最大絕對值,以判斷示波器自己是否鎖定上PTP。
如下圖所示即為示波器檢測PTP抖動。
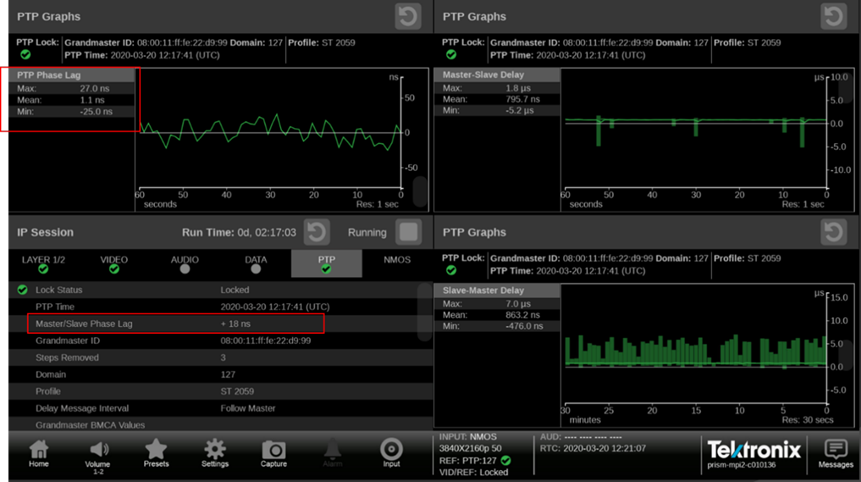
圖42 Telestream示波器offset測量
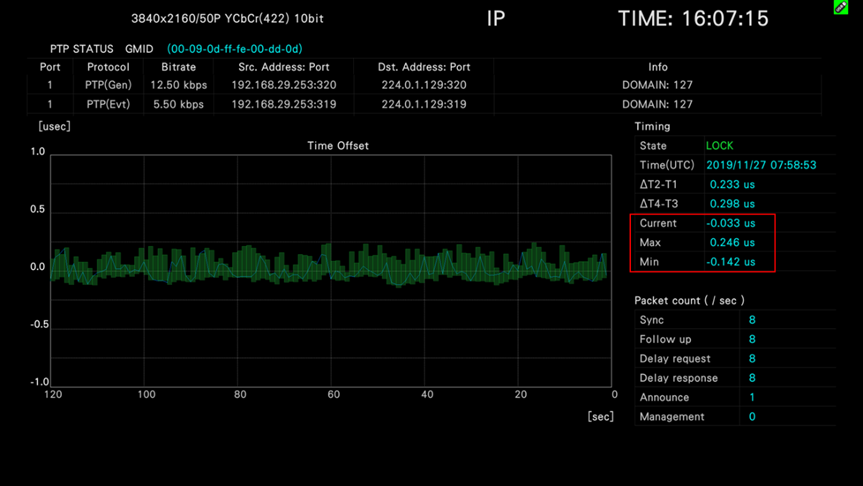
圖43 Leader示波器offset測量
Time delay測量網絡傳輸造成的延遲時間,根據計算出的offset值修正從時鐘以矯正時間。Time delay沒有標準的參考值,我們只能說delay值越小越好。
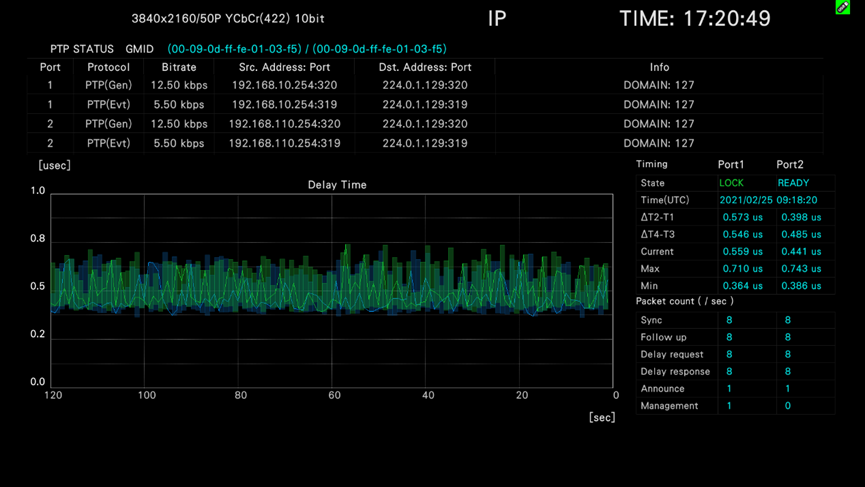
圖44 Leader示波器Delay Time截圖
7. PTP與BB的相位差
如之前所說,當前系統多為BB/PTP融合系統,雖然同一個同步機輸出的BB與PTP能夠保持相位一致,但由于BB信號是模擬信號,經過不同距離傳輸有可能導致相位發生變化,而此時系統中BB與PTP是否保持一致也變成了一個關鍵點。
那么二者的同步可以測量嗎?可以!
Telestream/Leader的示波器均有測量BB/PTP相位差的功能,如下圖所示即為示波器檢測BB/PTP相位差。
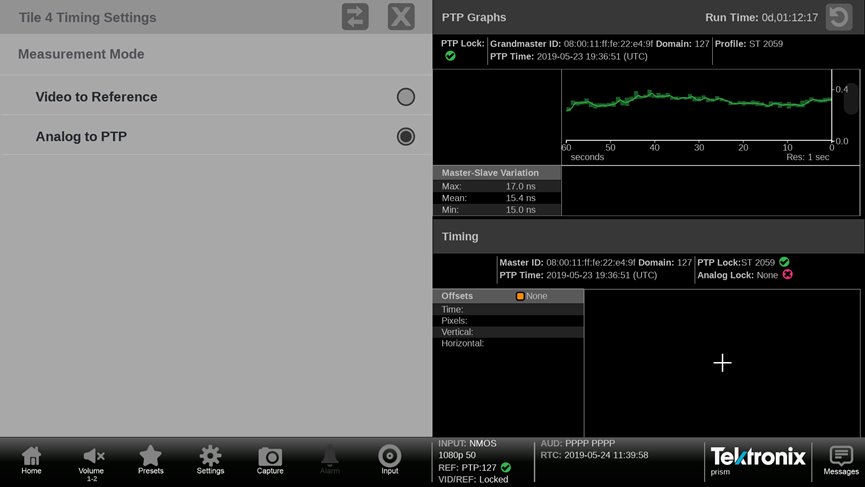
圖45 Telestream示波器檢測BB/PTP相位差
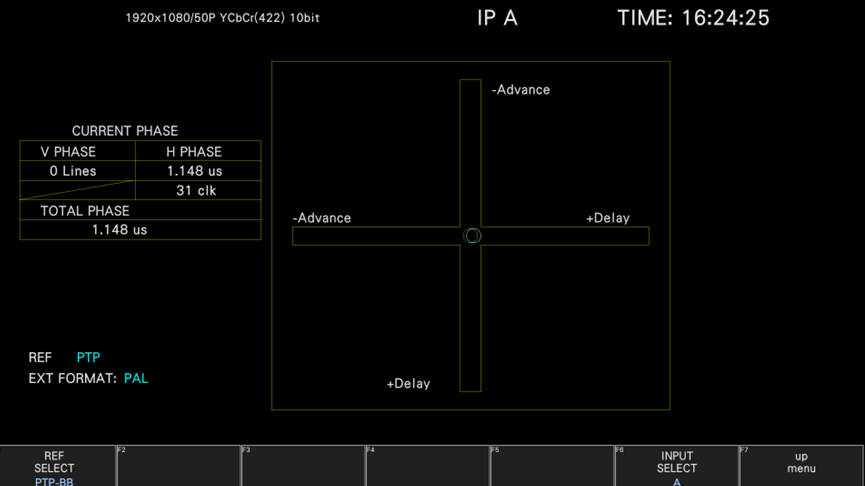
圖46 Leader示波器檢測BB/PTP相位差
一般認為BB的圓圈與PTP的十字重合為最佳同步狀態。由于PTP相位無法調整,若出現不同步的情況需要調整BB的相位。
此外,對于PTP的檢測不光可以使用示波器,還可以利用wireshark和PTP track hound等軟件進行報文檢測、交換機進行鏈路檢測、設備檢測等,多種手段的目的相同,都是確保系統中的PTP同步信息正確。
PTP同步系統檢測方法
說了PTP的測量指標,下面我們來介紹系統性檢查PTP同步的方法,尤其是在一個網絡環境中,同步機的設定,交換機的設定,環接都會對最終測量到的PTP值產生影響。
系統性的PTP檢測主要分為兩種,一種是單機檢測,即包括攝像機、切換臺等從屬設備,通過設備上PTP的相關菜單來測試設備是否正常鎖定于PTP。另一種是綜合檢測,對系統當前的PTP同步情況進行檢測,需要結合示波器、交換機、軟件等,通過這些手段可以檢測系統中的PTP狀態是否有問題以及其穩定性。因此其檢測思路可簡單總結為如下圖所示:
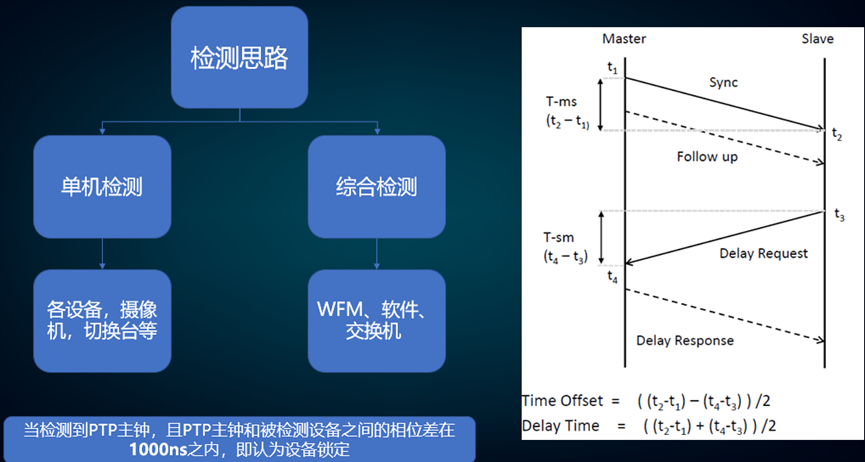
圖47 PTP檢測思路
最簡單的判斷結果就是,被檢測的節點是鎖定到當前系統的PTP主鐘,且PTP主鐘和被檢測設備之間的相位差在1000ns之內,即認為設備鎖定。同時,可以檢查前面介紹的各個指標以確定設備鎖定在系統中的哪個時鐘上,優先級是否正確,PTP profile是否生效。
ST2110同步系統架構
現階段的ST2110系統周邊或備份系統還在使用基帶的相關設備,且某些ST2110設備也還需要傳統同步才可保證信號傳輸和處理,因此目前階段的同步系統如下圖所示:
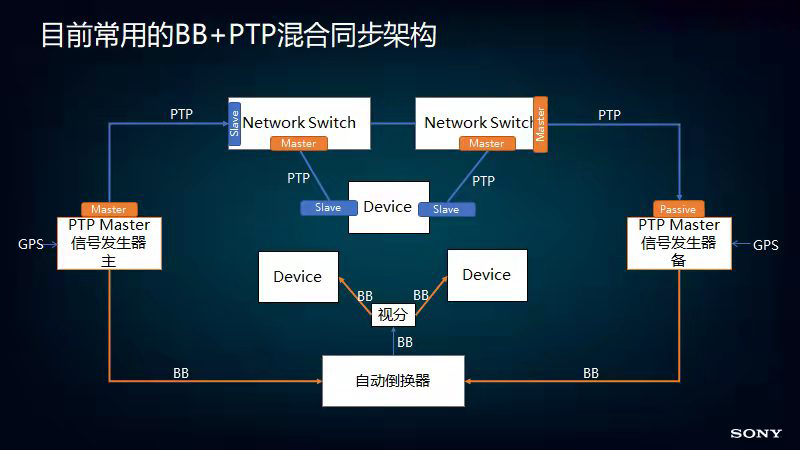
圖48 BB與PTP融合架構
因此在系統檢測時,除去PTP檢測,還需要對融合架構進行檢測,需要注意的一個是PTP和BB的相位差,十字重合為最好,確保應急切換時,IP鏈路和基帶鏈路的相位一致,不會出現問題;還有一個是確保BB輸出中含有VITC,這樣保證即使基帶源轉換成IP信號后,幀還是對齊的。
不同系統架構的PTP應急檢測
如前文架構圖所示,同步系統是一個整體架構,系統設計時充分的考慮了:主備冗余、多鏈路的保護、主備同步機的同步,最終實現當出現單個故障時系統依舊保持穩定。
但是由于設置問題或系統部分故障未能發現,整個系統會發生抖動,造成嚴重后果,因此在系統測試階段還需要對同步系統進行應急倒換測試。
情況一:主同步機斷電
如下圖,在單GPS系統中,將主同步機斷電,進行系統倒換測試:
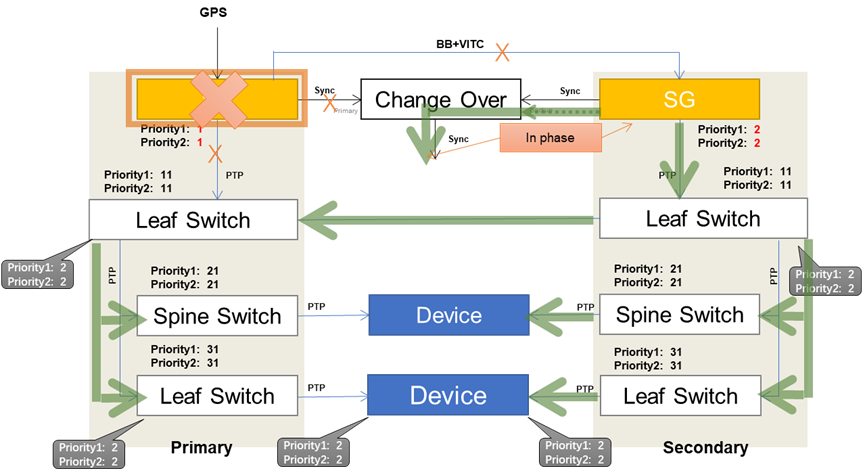
圖49 測試主同步機斷電應急倒換
測試結果應當是系統BB與PTP均倒換到備同步機,即device上PTP的優先級應為priority1:2,priority2:2,基帶倒換器上應倒換為備路同步機BB輸入,若出現其他情況需排查系統設置是否有問題。
情況二:丟失GPS
當測試外同步丟失的情況時,由于只是同步主機外同步丟失,同步機會自動進入到stay in genlock或stay in sync的保護模式,同步機保持晶振直到重新鎖定GPS。在stay in genlock的模式下,由于產生優先級的設備未在系統中離線,系統會保持鎖定在主同步機上,device上依舊顯示priority1:1,priority2:1,但是在示波器上可以看到時鐘源已經轉移到同步機上了。
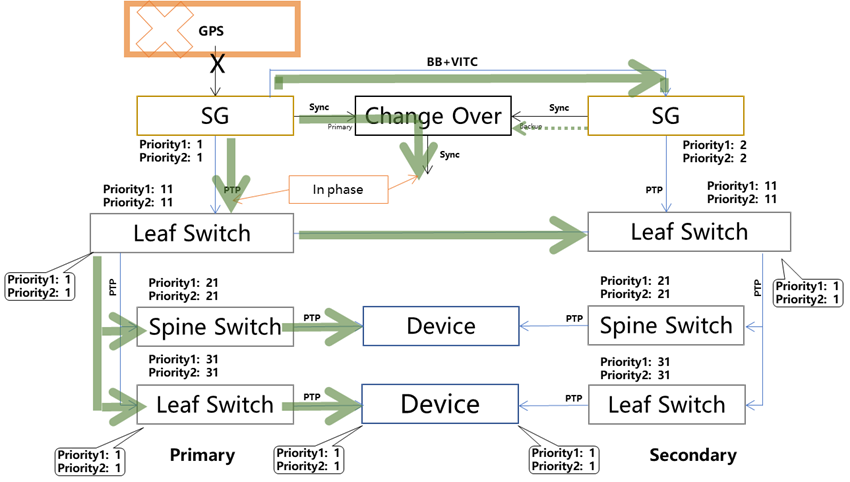
圖50 測試GPS丟失情況的應急倒換
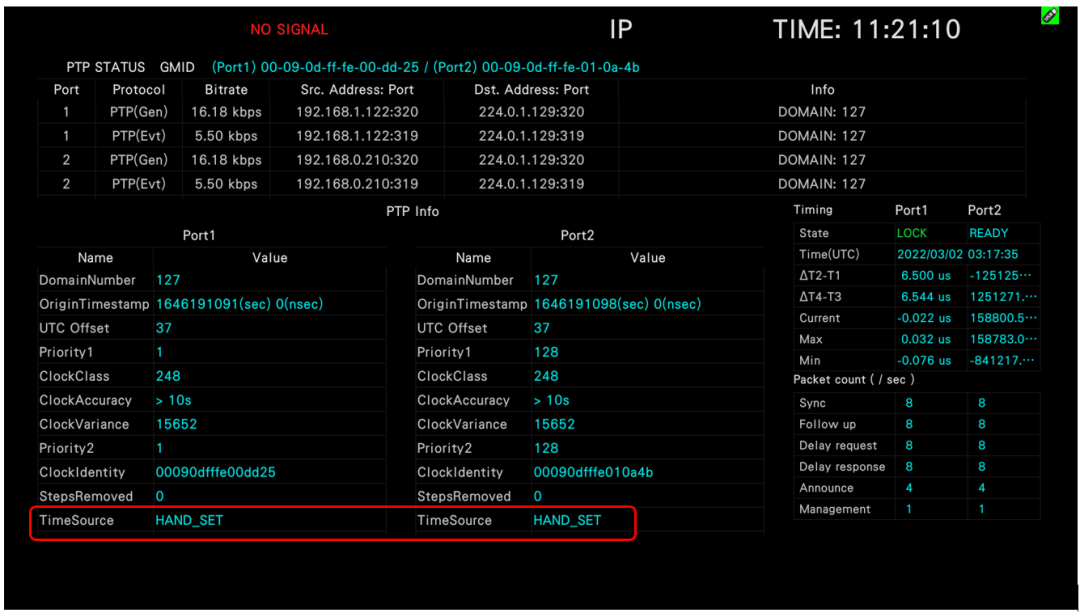
圖51 系統自動切換到同步機發生PTP
情況三:PTP上聯交換機斷電
此外,還有交換機斷電的情況,當同步機上聯的交換機意外斷電,主路PTP丟失,系統根據優先級會自動鎖定到備同步機PTP上,device上顯示priority1:2,priority2:2,此時需要注意的是雖然PTP倒換到備同步機上,但是BB依舊鎖定在主同步機,不過由于主備是互鎖的,備路的BB信號與主路相位處于統一水平,不必擔心BB信號會對應急切換產生影響。
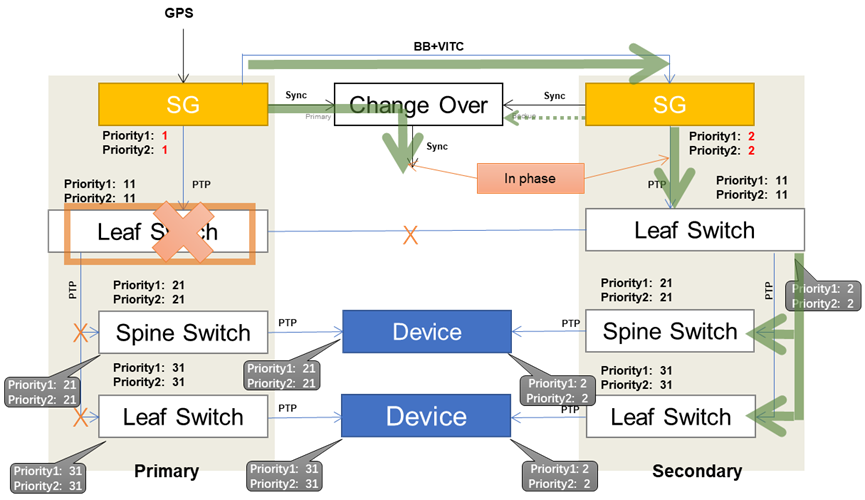
圖52 測試PTP上聯交換機斷電應急情況
情況四:PTP心跳線斷開
最后一種情況是主備交換機的心跳線斷開,這種情況下由于備路交換機鎖定到最高優先級的時鐘是備同步機,如圖所示,這種情況下,主鏈路鎖定主時鐘,備系統鎖定備時鐘。系統設備的輸出也不會發生抖動。
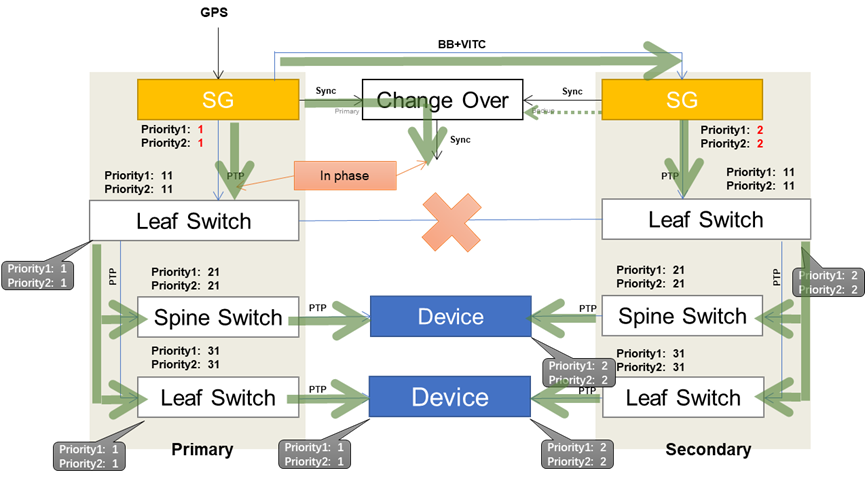
圖53 測試主備系統PTP心跳線斷開應急情況
以上我們都是討論單GPS的系統,由于備同步機鎖定主同步機,應急情況也相對簡單。但是當系統中主備同步機各自鎖定GPS時,倒換情況會更加復雜一些,篇幅有限,以后有機會再詳細討論。我們只要記住系統一定會根據BMCA算法計算出當前系統中的最佳時鐘并鎖定,就可以了。
本期主要介紹了PTP的測量指標,以及系統性檢查同步系統的情況,希望對大家有所幫助,真氣猶在,必當盡力而為。下期我們將介紹數據流特性的檢測,包含2110-10的一部分內容,以及2110-20,-30,-40標準。
原文標題:IP測量探索(四)——PTP同步測量
文章出處:【微信公眾號:索尼中國專業】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
示波器
+關注
關注
113文章
6240瀏覽量
184799 -
IP
+關注
關注
5文章
1701瀏覽量
149504 -
測量
+關注
關注
10文章
4849瀏覽量
111241
原文標題:IP測量探索(四)——PTP同步測量
文章出處:【微信號:Sonystudio,微信公眾號:索尼中國專業】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何利用PTP協議實現一主多從網絡時間同步?
如何實現PTP協議的精準同步時鐘?
TSN時鐘同步 | PTP對時案例演示——基于NXP i.MX 8M Plus
如何使用IEEE1588 (PTP) 同步時間?
夏光XG7010針對PTP時間同步服務器測試解決方案
Linux ptp4l程序實現PTP邊界時鐘和普通時鐘
PTP Clock Manager for Linux Message Log 手冊

【虹科】如何借助PTP來做高精度相機同步?

PTP Clock Manager for Linux Message Log 手冊
淺談網絡精確時間同步—PTP(IEEE1588)






 工商網監
工商網監
評論