") 汽車電子技術(shù)在五個方面的技術(shù)變革
汽車電子技術(shù)在五個方面的技術(shù)變革
近些年來伴隨著應(yīng)用計算機(jī)(微處理機(jī))和集成電路的成果在汽車工業(yè)的廣泛應(yīng)用,汽車正逐漸從機(jī)械產(chǎn)品屬性向電子產(chǎn)品屬性演化!而當(dāng)前正在轟轟烈烈進(jìn)行的汽車“新四化”浪潮將催生汽車電子技術(shù)在信息通訊、電子電氣架構(gòu)、軟件架構(gòu)、處理器和傳感器等五個方面發(fā)生變革。
1、汽車總線通訊從CAN總線向汽車以太網(wǎng)發(fā)展
汽車總線技術(shù)解決各個控制器之間信息交互問題,目前汽車總線技術(shù)以CAN總線為主,LIN總線為輔,CAN總線具有多主仲裁的特點(diǎn),但是它在每個時間窗口里只能一個節(jié)點(diǎn)贏得控制權(quán)發(fā)送信息,其他節(jié)點(diǎn)都這個時候都要變?yōu)榻邮展?jié)點(diǎn),因此CAN總線只能實現(xiàn)半雙工通訊,最高傳輸速度1Mbps(40m)。為了獲得更大的傳輸速度,BOSCH,freescale等公司開發(fā)了Flexray總線用作線控系統(tǒng)的數(shù)據(jù)傳輸,寶馬、戴姆勒公司開發(fā)了MOST (多媒體傳輸系統(tǒng))總線用作娛樂系統(tǒng)數(shù)據(jù)傳輸。
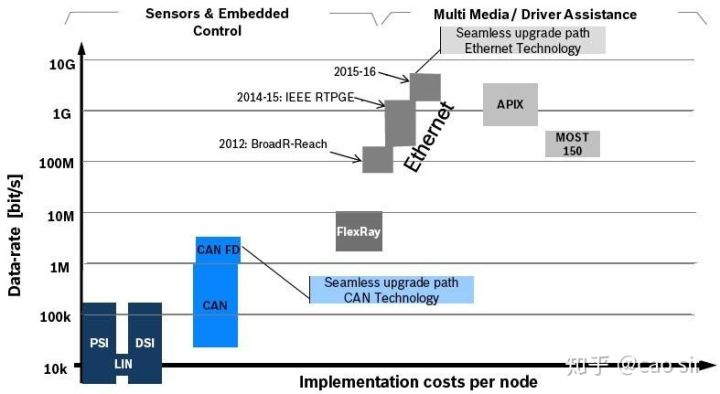
各類總線的成本和帶寬
但隨著汽車“新四化”的發(fā)展,ECU數(shù)量,ECU的運(yùn)算能力需求都呈現(xiàn)爆發(fā)式增長,尤其是ECU與ECU之間對全雙工通訊有了強(qiáng)烈需求,繼續(xù)使用CAN總線連接不僅將造成汽車電子系統(tǒng)成本大增,更無法滿足高性能處理器實時高速雙向數(shù)據(jù)交互的需求。
車載以太網(wǎng)使用單對非屏蔽電纜以及更小型緊湊的連接器,使用非屏蔽雙絞線時可支持15m的傳輸距離(對于屏蔽雙絞線可支持40m),這種優(yōu)化處理使車載以太網(wǎng)可滿足車載EMC要求。可減少高達(dá)80%的車內(nèi)連接成本和高達(dá)30%的車內(nèi)布線重量。100M車載以太網(wǎng)的PHY采用了1G以太網(wǎng)的技術(shù),可通過使用回聲抵消在單線對上實現(xiàn)雙向通信,滿足智能化時代對高帶寬的需求。
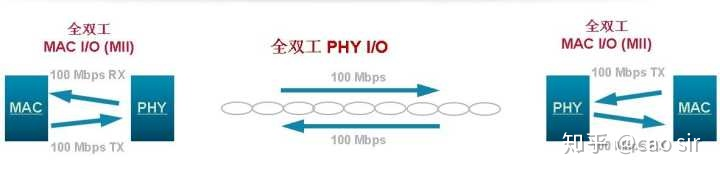
應(yīng)用回聲抵消技術(shù)在一對雙絞線上實現(xiàn)全雙工通訊
車載以太網(wǎng)短期內(nèi)無法全部取代現(xiàn)有CAN網(wǎng)絡(luò),其在汽車行業(yè)上的應(yīng)用需要一個循序漸進(jìn)的過程,大致可分為 3 個階段:局部網(wǎng)絡(luò)階段、子網(wǎng)絡(luò)階段、多子網(wǎng)絡(luò)階段。
局部網(wǎng)絡(luò)階段,可單獨(dú)在某個子系統(tǒng)上應(yīng)用車載以太網(wǎng)技術(shù),實現(xiàn)子系統(tǒng)功能,如基于 DoIP 協(xié)議的 OBD 診斷、使用IP 協(xié)議的攝像頭等;
子網(wǎng)絡(luò)階段,可將某幾個子系統(tǒng)進(jìn)行整合,構(gòu)建車載以太網(wǎng)子系統(tǒng),實現(xiàn)各子系統(tǒng)的功能,如基于 AVB 協(xié)議的多媒體娛樂及顯示系統(tǒng)、ADAS 系統(tǒng)等;
多子網(wǎng)絡(luò)階段,將多個子網(wǎng)絡(luò)進(jìn)行整合,車載以太網(wǎng)作為車載骨干網(wǎng),集成動力、底盤、車身、娛樂等整車各個域的功能,形成整車級車載以太網(wǎng)絡(luò)架構(gòu),實現(xiàn)車載以太網(wǎng)在車載局域網(wǎng)絡(luò)上的全面應(yīng)用。
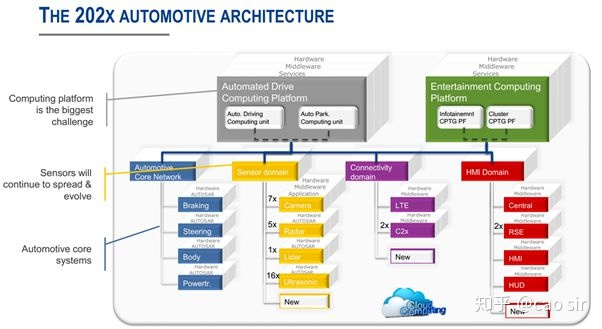
未來汽車網(wǎng)絡(luò)架構(gòu),以太骨干網(wǎng)、域控制器是核心
2、整車電子電氣架構(gòu)由分布式向集中式發(fā)展
為了統(tǒng)籌考慮汽車的電子電氣系統(tǒng)原理設(shè)計、中央電器盒的設(shè)計、連接器的設(shè)計、電子電氣分配系統(tǒng)等設(shè)計,德爾福公司首先提出了整車電子電氣架構(gòu)(EEA)的概念。傳統(tǒng)的電子電氣架構(gòu)是一種分布式方案,根據(jù)汽車功能劃分成不同的模塊,如動力總成、信息娛樂、底盤和車身等。這種分布式方案最大的特點(diǎn)是功能劃分明確,可以通過預(yù)先的設(shè)計來嚴(yán)格明確界限,所有歷史工作的繼承性也很強(qiáng)。由于劃分后的每個模塊相對獨(dú)立,如果需要做出改變,那么選出一部分東西進(jìn)行更新即可。然而,這種模式的缺點(diǎn)也很明顯,那就是容易導(dǎo)致模塊太多且可控性不強(qiáng)。
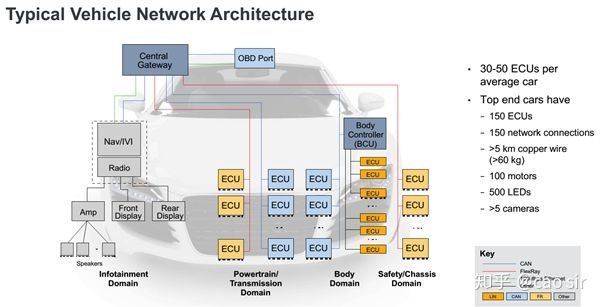
隨著汽車“新四化”的發(fā)展,分布式電子電器架構(gòu)設(shè)計已經(jīng)不能滿足需求。一方面現(xiàn)有的電子電氣架構(gòu)在功能擴(kuò)展性這一塊并不好,無法做到柔性兼容,每增加一個新功能都需要增加一套ECU和通訊系統(tǒng),隨著ECU系統(tǒng)數(shù)量和質(zhì)量的增加,由于是分布式計算,大量的運(yùn)算資源被浪費(fèi)了,由此產(chǎn)生的成本增加大約300-500美元,如果沿用目前的電子架構(gòu)體系,產(chǎn)生的成本增加最少也是1000美元。另一方面是線束系統(tǒng)。一輛低端車的線束系統(tǒng)成本只要大約300美元,重量大約30公斤,長度大約1500米,線束大約600根,1200個接點(diǎn)。而目前一輛豪華車的線束系統(tǒng)成本大約550-650美元,重量大約60公斤,線束大約1500根,長度大約5000米,3000個接點(diǎn)。如果沿用目前的電子架構(gòu)體系,無人車時代的線束成本不會低于1000美元,重量可達(dá)100公斤。
傳統(tǒng)車的線束占了總成本的5%左右
為了降低整車成本,汽車電子電氣架構(gòu)將由分布式向著集中式發(fā)展,其核心思想是用高性能的中央計算單元取代現(xiàn)在常用的分布式計算架構(gòu)。奧迪將新架構(gòu)命名為中央計算集群(central computing cluster),而寶馬叫做中央計算平臺(centralcomputing platform),Tesla在Model3上首次使用了左車身控制器,右車身控制器,自動駕駛及娛樂域控制模塊這三個控制器來控制整車電氣系統(tǒng),實現(xiàn)了域控制器概念。在通訊技術(shù)更加先進(jìn)的未來,車輛的控制系統(tǒng)將放在云端,實現(xiàn)數(shù)據(jù)云傳輸和云控制,車輛硬件將簡化成一個傳感器和執(zhí)行器,這樣可以在降低成本的同時無限增加車輛功能的可拓展性。總之,汽車電子電氣架構(gòu)正圍繞一個強(qiáng)有力的通信架構(gòu)和整車級計算平臺這兩項內(nèi)容而展開深度演化。
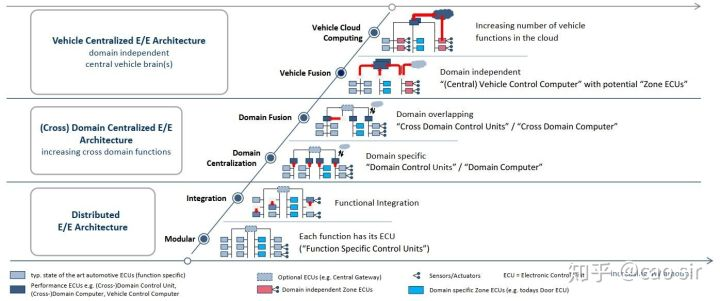
BOSCH對電子電氣架構(gòu)的階段定義
3、汽車軟件架構(gòu)由面向數(shù)據(jù)到面向服務(wù)發(fā)展
汽車軟件與硬件共同實現(xiàn)了汽車某項功能。為了使汽車行業(yè)的各種軟件能夠兼容與協(xié)作開發(fā),有利于提高汽車軟件的開發(fā)效率,歐洲汽車行業(yè)在20世紀(jì)90年代中期開發(fā)了一套用于汽車電子的開放式系統(tǒng)標(biāo)準(zhǔn)--OSEK/VDX,這是用于分布式實時控制系統(tǒng)的一組標(biāo)準(zhǔn),核心部分包括操作系統(tǒng)(OS)、通信(COM)、網(wǎng)絡(luò)管理(NM)和OSEK實現(xiàn)語言(OIL)四個子標(biāo)準(zhǔn)。由于OSEK標(biāo)準(zhǔn)存不能支持在已經(jīng)存在的硬件平臺的基礎(chǔ)上實現(xiàn)新的功能,急需開發(fā)一套新的標(biāo)準(zhǔn)可以將軟件作為插件運(yùn)行在電子控制單元上。
2003年全球汽車制造商、部件供應(yīng)商及其他電子、半導(dǎo)體和軟件系統(tǒng)公司聯(lián)合建立了汽車開放系統(tǒng)架構(gòu)(AUTOSAR)。AUTOSAR工作目標(biāo)主要有三個:建立獨(dú)立于硬件的分層軟件架構(gòu),為實施應(yīng)用提供方法論,包括制定無縫的軟件架構(gòu)堆疊流程并將應(yīng)用軟件整合至ECU,制定各種車輛應(yīng)用接口規(guī)范,作為應(yīng)用軟件整合標(biāo)準(zhǔn),以便軟件構(gòu)件在不同汽車平臺復(fù)用。因此AUTOSAR整體框架為分層式設(shè)計,以中間件RTE(RuntimeEnvironment)為界,隔離上層的應(yīng)用層(Application Layer)與下層的基礎(chǔ)軟件(Basic Software)。中間RTE(Runtime Environment)作為虛擬功能總線VFB(Virtual Functional Bus)的實現(xiàn),隔離了上層的應(yīng)用軟件層(Application Layer)與下層的基礎(chǔ)軟件(Basic Software),擺脫了以往ECU軟件開發(fā)與驗證時對硬件系統(tǒng)的依賴。另外AUTOSAR采用了靜態(tài)驅(qū)動系統(tǒng),在軟件系統(tǒng)運(yùn)行過程中,不同功能函數(shù)被事先定義好的排序文件(Scheduling)依次調(diào)用、逐個運(yùn)行。優(yōu)點(diǎn)是資源分配問題被事先一次性解決,每個函數(shù)的具體運(yùn)行區(qū)間亦被提前鎖定。這滿足了對行車安全有苛刻要求的功能函數(shù)運(yùn)行需求,比如決定安全氣囊是否打開的功能函數(shù)被固定地每幾毫秒運(yùn)行一次,以便緊急情況下氣囊得以及時打開。但它固定化的軟件架構(gòu)限制了使用者個性化開發(fā)的需求,且無法支持在線升級和軟件迭代更新!
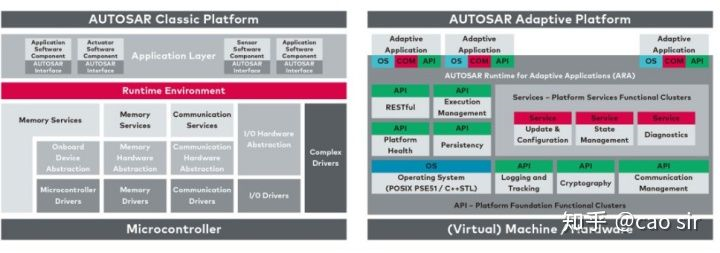
2017年3月AUTOSAR創(chuàng)立了適用Service Oriented Architecture的AdaptiveAUTOSAR標(biāo)準(zhǔn)。與經(jīng)典平臺相比,AUTOSAR自適應(yīng)平臺采用面向?qū)ο笳Z言C++語言進(jìn)行軟件開發(fā) (經(jīng)典AUTOSAR采用C語言),基于智能操作系統(tǒng)(POSIX OS, 例如Linux)進(jìn)行APP的開發(fā),使得它可以適應(yīng)高性能微處理器(如ARM)和智能操作系統(tǒng)(如Linux)的智能互聯(lián)應(yīng)用功能的開發(fā)。因此,在未來的車輛上在傳統(tǒng)應(yīng)用如動力總成、底盤、車身和內(nèi)部電子控制等仍將使用AUTOSAR經(jīng)典平臺,在新應(yīng)用程序如高度自動化駕駛、V2X、空中軟件更新或網(wǎng)聯(lián),將使用AUTOSAR自適應(yīng)平臺。

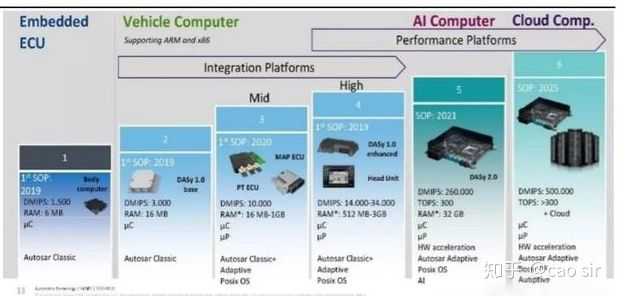
傳統(tǒng)汽車功能簡單,與外界交互較少,常為分布式 ECU,主要為等待指令、停機(jī)指令、空操作指令、中斷指令等各類控制指令,運(yùn)算速度較低,其運(yùn)算單位為 DMIPS(百萬條指令/秒)、且存儲較小,代表廠商如英飛凌、瑞薩、德州儀器、恩智浦、意法半導(dǎo)體等;智能網(wǎng)聯(lián)汽車,不僅需要與人交互,也需要大量與外界環(huán)境甚至云數(shù)據(jù)中心交互,將面臨巨大非結(jié)構(gòu)化數(shù)據(jù)處理需求,車端中央計算平臺將需要 500+ DMIPS的控制指令運(yùn)算能力、300+TOPS的 AI 算力。因此汽車芯片結(jié)構(gòu)形式由 MCU 向 SOC 異構(gòu)芯片方向發(fā)展。SoC 是一顆系統(tǒng)級芯片,由 CPU+GPU+DSP+NPU+各種外設(shè)接口、存儲類型等電子元件組成。SOC 較 MCU 集成程度更高,集成 AI 處理單元/音頻處理單元DSP/圖像處理單元GPU/ 深度學(xué)習(xí)加速單元 NPU 等,功能更復(fù)雜,片上互聯(lián)利于集成電路之間的高速互通互聯(lián),資源利用效率更高。SOC 芯片上有豐富的軟件配套(工具鏈、編譯器等),提升了處理效率。車載SOC芯片代表產(chǎn)品如華為昇騰系列芯片、地平線征程系列芯片、寒武紀(jì)的MLU 系列芯片、特斯拉FSD等。
5、汽車傳感器向著融合智能的方向發(fā)展
傳感器在汽車上的應(yīng)用越來越廣泛,隨著汽車網(wǎng)絡(luò)化、信息化發(fā)展,傳感器從傳統(tǒng)只能檢測一個物理量逐漸發(fā)展為可以同時測量多種物理量,與微處理器相結(jié)合使傳感器具有信息檢測、信息處理、自學(xué)習(xí)能力等智能功能。
傳感器融合是指將安裝在各位置的多個相同種類或者不同種類的傳感器所提供的階段性數(shù)據(jù)進(jìn)行綜合,采用程序軟件對其進(jìn)行分析、判斷、過濾、修整,去除多個傳感器信息之間存在的冗余、矛盾,并進(jìn)行互補(bǔ)、修正,降低其不確定性,獲得被測對象確定的描述,最大限度提高系統(tǒng)的決策、規(guī)劃、反應(yīng)的快速性和正確性,使系統(tǒng)獲得更充分的信息。數(shù)據(jù)融合增強(qiáng)了系統(tǒng)的穩(wěn)定性、精確性和健壯性,延展了搜索范圍,提高了實時性或空間的分辨率,擴(kuò)大目標(biāo)特征的維度,加強(qiáng)了信息的全面性、準(zhǔn)確性,改善了信息的可信度,增強(qiáng)了系統(tǒng)的防錯能力和自學(xué)習(xí)能力,同時也能夠解決信息泛濫的問題,從而提高整個系統(tǒng)的性能。
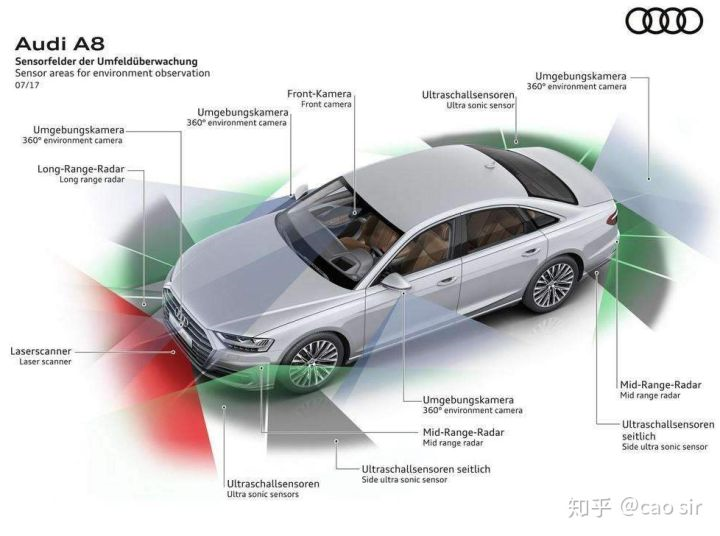
奧迪A8自動駕駛系統(tǒng)搭載的各類融合傳感器
以上就是對汽車電子未來發(fā)展趨勢的看法,隨著信息技術(shù)不斷演化,汽車電子日益成為汽車變革的核心,誰抓住汽車電子的發(fā)展脈搏,誰就抓住了未來!在這場技術(shù)實力博弈中,哪些企業(yè)最終能夠脫穎而出,笑到最后,讓我們拭目以待!
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2551文章
51163瀏覽量
754146 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5427瀏覽量
171839 -
汽車電子
+關(guān)注
關(guān)注
3027文章
7972瀏覽量
167149
原文標(biāo)題:談?wù)勂囯娮釉谖鍌€方面的技術(shù)變革
文章出處:【微信號:電子工程世界,微信公眾號:電子工程世界】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
電子技術(shù)經(jīng)驗分享
電馭未來,智啟北京 — 電力電子技術(shù)產(chǎn)業(yè)大會北京站盛大啟幕
儲能逆變器自動測試系統(tǒng)的技術(shù)原理和應(yīng)用
巨霖科技亮相中國電力電子技術(shù)產(chǎn)業(yè)大會
模擬電子技術(shù)基礎(chǔ)電子版PDF第五版(童詩白,華成英)+答案詳解
光通信技術(shù)在醫(yī)療健康方面的應(yīng)用
邏輯芯片:現(xiàn)代電子技術(shù)的基石
大數(shù)據(jù)在軍事方面的應(yīng)用有哪些

RISC-V在服務(wù)器方面的應(yīng)用與發(fā)展前景如何?剛畢業(yè)的學(xué)生才開始學(xué)來的及嗎?
SMT技術(shù):為汽車電子系統(tǒng)注入強(qiáng)大動力

深圳比創(chuàng)達(dá)電子EMC|EMC電磁兼容技術(shù):原理、應(yīng)用與未來展望.
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】1.汽車產(chǎn)業(yè)大變局
藍(lán)牙模塊在汽車電子方面的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論