 使用workvisual軟件對KR C4進行外部軸配置
使用workvisual軟件對KR C4進行外部軸配置
?操作步驟
① 進入workvisual軟件,打開或創建一個項目,如左圖所示。
② 通過菜單欄“文件”選項,選擇“Cataloghanding…”,如右圖所示。
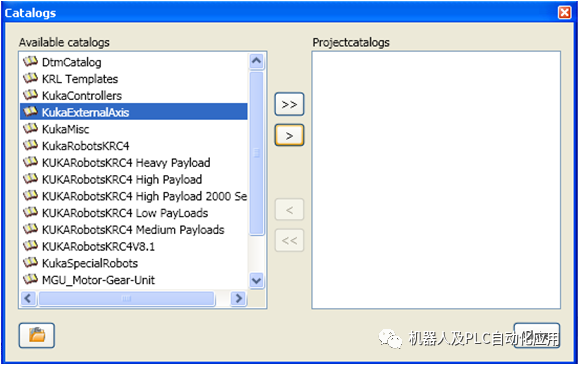
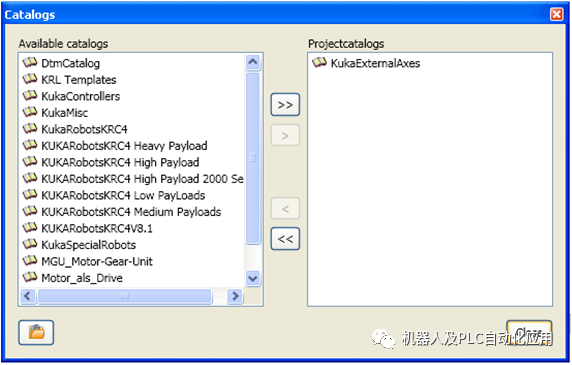
?接著在彈出的選擇窗口中,選擇樣本文件,如左圖所示,然后通過添加按鈕添加到主目錄框中,如右圖所示,這樣樣本導入完成。
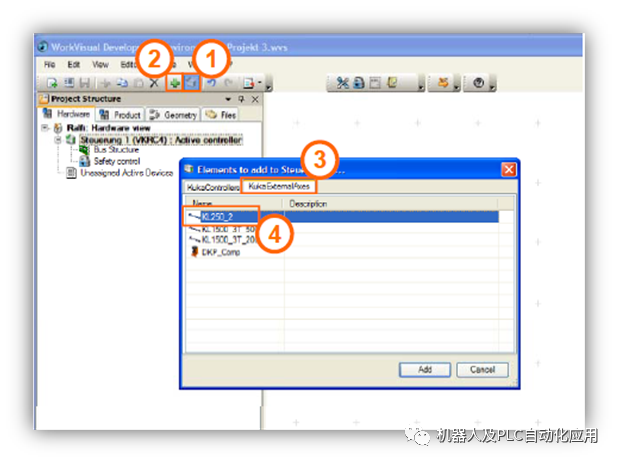
③ 激活項目并將樣本添加到項目中,如圖所示。
(1)激活項目
(2)添加樣本
(3)選擇外部軸欄
(4)選擇需要的外部軸
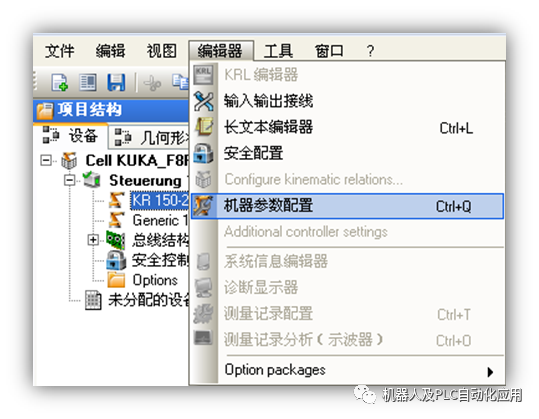
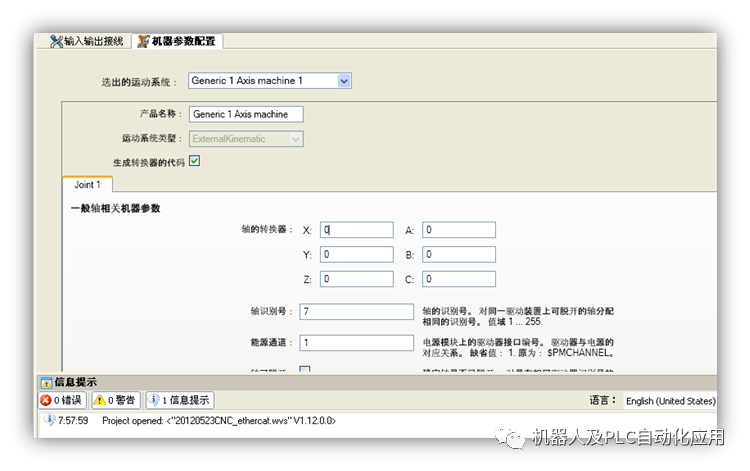
④在項目結構中,選中機器人,單擊編輯器菜單,選擇“機器參數配置”選項,如左圖所示,之后彈出機器人參數配置窗口,如右圖所示,在窗口中輸入機器人各項參數.
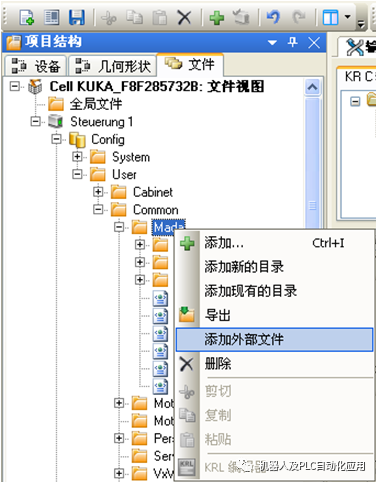
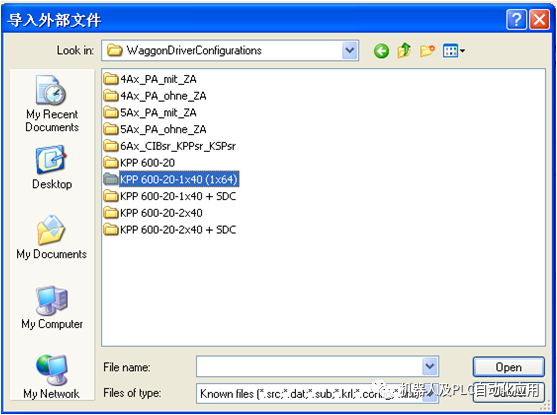
⑤ 進入“文件”界面,加入驅動文件,在這之前,需要到C:Program FilesKUKAWorkVisual2.4WaggonDriverConfigurations找到KPP的驅動文件,如果是是一個外部軸選擇KPP600-20-1x40 (1x64),如果是兩個外部軸選擇KPP 600-20-2x40,把其中的兩個文件導入到MADA目錄下。
注意:如果是PA的機器人,外部軸通道是連接在KSP上的,因此這邊需要選擇4Ax_PA_mit_ZA或者5Ax_PA_mit_ZA。
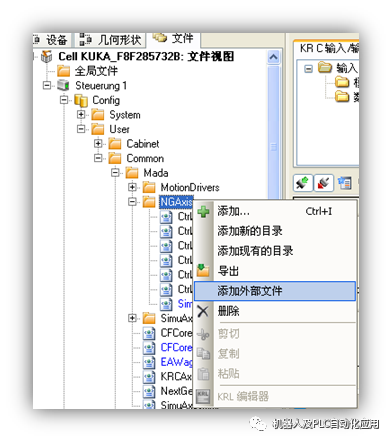
?然后選中“mada”文件夾,右擊,選擇“添加外部文件”選項,如左圖所示,在彈出的導入外部文件窗口中選擇“KPP 600-20-1×40(1×64)”并雙擊打開,選擇文件夾中的文件,并單擊“Open”按鈕,以導入外部文件,如右圖所示。
⑥ 導入外部軸配置文件,選中“文件”欄中的“NGAxis”文件夾,并右擊選擇“添加外部文件”選項,如左圖所示。
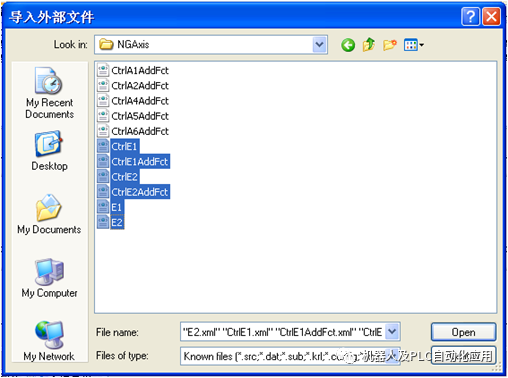
⑦ 選擇“NGAxis”文件夾下的相關壓縮包文件CtrlE1.xml, CtrlE1AddFct.xml, E1.xml,,如右圖所示。如果是軸2系統,則在添加一次,名稱換成E2即可.
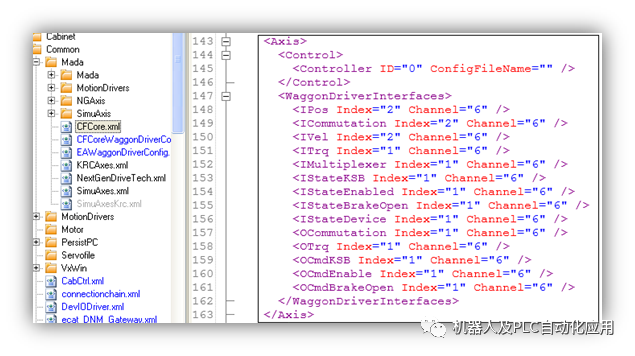
⑧ 在“Mada”文件夾下,選擇“SimuAxis”文件夾,找到CFCore.xml,復制如下左圖所示的一個塊,放到最后,然后把通道改成6,如果是2軸則再復制一個塊,通道一個改6一個改7。
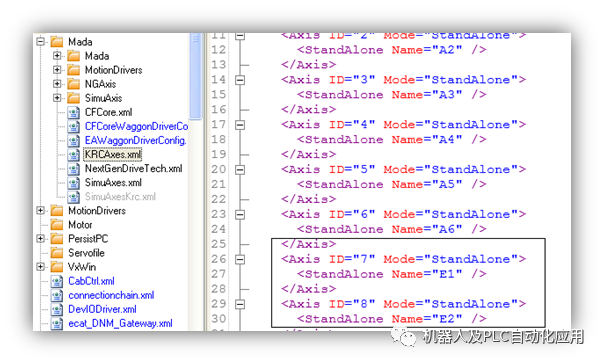
⑨ 在“SimuAxis”文件夾下,找到KRCAxes.xml,復制如下右圖所示的一個塊,把名字改成E1或者E2。
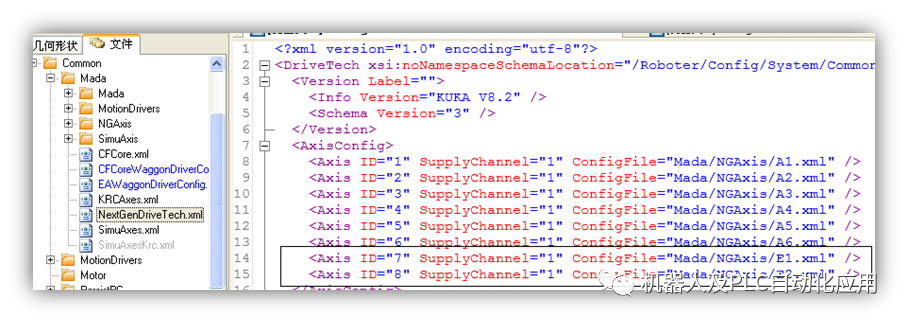
⑩ 在“SimuAxis”文件夾下,找到NextGenDriveTech.xml,如下圖所示這樣添加第七和第八軸,名字改成E1.xml, E2.Xml。
? 將項目導入機器人,在能在機器人上進行參數的設置。在操作機器人時需注意,將坐標系調至“軸坐標系”下。
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28466瀏覽量
207311 -
軟件
+關注
關注
69文章
4957瀏覽量
87604
原文標題:使用workvisual軟件對KR C4進行外部軸配置
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AMC7834只使用外部4個ADC,怎么配置可以使轉換速率達到最快?
8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用

在單個C2000?MCU上使用FCL和SFRA進行雙軸電機控制

使用C2000 EtherCAT從站控制器的SMI進行以太網PHY配置
采用OPA2377設計跨阻放大器,其中R5,R4,R6構成T型反饋回路,請問電容C4的作用是什么?
VCSEL廠商縱慧芯光完成數億元人民幣的C4輪融資首關
請問KUKA機器人的Mada文件怎么配置呢?


AMD Kria KR260 DPU配置教程2

AMD Kria KR260 DPU配置教程






 工商網監
工商網監
評論