") 淺析自動(dòng)駕駛盲點(diǎn)監(jiān)測系統(tǒng)
淺析自動(dòng)駕駛盲點(diǎn)監(jiān)測系統(tǒng)
想必開車的各位都遇到過這樣的場景,車輛在路面行駛的過程中,會(huì)遇到需要變道、轉(zhuǎn)彎、駛?cè)牖蝰偝鐾\囄坏男枨螅捎谲囕v本身存在盲區(qū)的緣故,僅通過兩側(cè)后視鏡,很難準(zhǔn)確查看后方道路情況,如果盲區(qū)內(nèi)有車輛或行人存在,就會(huì)導(dǎo)致剮蹭事故出現(xiàn),很多的交通事故都是因?yàn)檐囕v的盲區(qū)的存在,駕駛員獲得了錯(cuò)誤的道路信息導(dǎo)致的。
所謂盲區(qū),就是駕駛員在駕駛座位上無法通過后視鏡查看到的道路位置,盲區(qū)無法直接通過調(diào)整后視鏡進(jìn)行消除,在大雨天氣、大霧天氣、夜間光線昏暗的場景,更是增加了駕駛員的判斷難度,導(dǎo)致駕駛員難以通過后視鏡準(zhǔn)確判斷后方車輛的位置,此時(shí)如果進(jìn)行變道、轉(zhuǎn)彎等操作,就會(huì)面臨更大的危險(xiǎn)。
為了提升駕駛員行車安全,補(bǔ)償駕駛員在駕車過程中無法消除的盲區(qū),盲點(diǎn)監(jiān)測系統(tǒng)(BMS或BLIS)應(yīng)運(yùn)而生,盲點(diǎn)監(jiān)測系統(tǒng)又被稱之為并線輔助系統(tǒng),是車輛上的一個(gè)高級(jí)輔助駕駛功能,主要功能就是掃除后視鏡盲區(qū),通過微波雷達(dá)探測車輛兩側(cè)的后視鏡盲區(qū)中的超車車輛,當(dāng)在盲區(qū)內(nèi)出現(xiàn)有其他車輛時(shí),盲區(qū)監(jiān)測系統(tǒng)就會(huì)通過聲音、燈光等強(qiáng)提醒的方式給駕駛員進(jìn)行提醒,因此盲點(diǎn)監(jiān)測系統(tǒng)可以有效保障車輛在變道或轉(zhuǎn)彎過程中的安全,避免剮蹭事故的發(fā)生。
盲點(diǎn)監(jiān)測系統(tǒng)的出現(xiàn)可以追溯到1995年美國工程師喬治·普拉策向美國工程師協(xié)會(huì)提出的“盲點(diǎn)區(qū)后視鏡”,通過調(diào)整中間及雙側(cè)后視鏡的方式來減少駕駛員的視覺盲區(qū),主要是在兩側(cè)后視鏡上加裝可以看清盲區(qū)狀況的輔助曲面鏡,來增加駕駛員的可視范圍,提高駕駛員的駕駛安全,此方案被很多汽車廠商所采納,并得到實(shí)際的應(yīng)用。
被普遍認(rèn)可并接受的盲點(diǎn)監(jiān)測系統(tǒng)則是在2007年裝載于第二代富豪S80車輛上的高級(jí)輔助駕駛系統(tǒng),主要是通過加裝在后視鏡下方的攝像頭來獲取車輛側(cè)后方的影像,再通過影像來辨別后方的車輛或行人,從而提醒駕駛員行車安全。但是這個(gè)系統(tǒng)需要在車輛時(shí)速超過22.5 km/h時(shí)才可以開啟,且在濃霧、下雨等視線不佳的天氣,這套系統(tǒng)也會(huì)造成誤判。
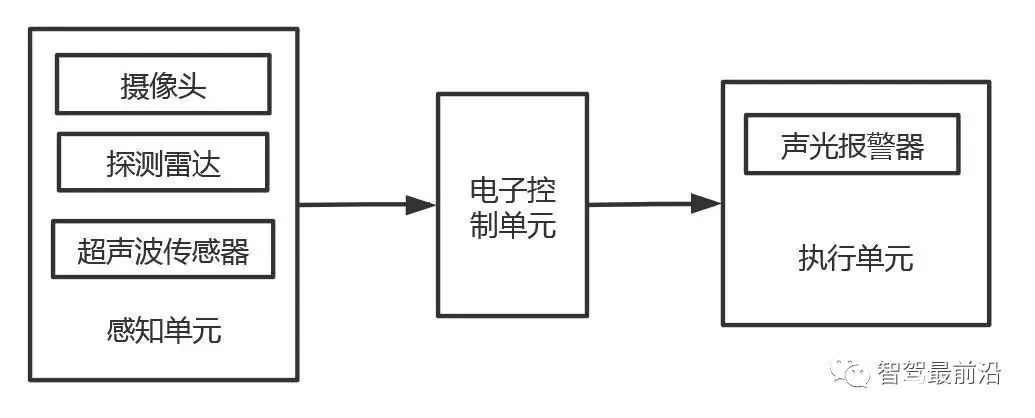
盲點(diǎn)監(jiān)測系統(tǒng)主要是由感知單元、電子控制單元及執(zhí)行單元組成,感知單元包括攝像頭、探測雷達(dá)、超聲波傳感器,執(zhí)行單元為聲光報(bào)警器。感知單元主要用來監(jiān)測車輛側(cè)后方盲區(qū)中是否存在車輛或行人,并將感知信息傳遞給電子控制單元;電子控制單元將感知單元獲取的信息進(jìn)行處理及判斷,并將處理后的信號(hào)輸出給執(zhí)行單元;執(zhí)行單元的主要作用是執(zhí)行電子控制單元的指令,如果盲區(qū)存在車輛或行人,聲光報(bào)警器會(huì)通過圖像或者聲音的方式,給駕駛員進(jìn)行提示,讓駕駛員得到更好的駕駛預(yù)判。
盲點(diǎn)監(jiān)測系統(tǒng)從技術(shù)上主要分為影像和雷達(dá)2種,2種技術(shù)路線各有優(yōu)劣。
影像:影像顧名思義就是通過在車輛上加裝攝像頭的方式,對車輛盲區(qū)進(jìn)行監(jiān)測,攝像頭主要加裝在兩側(cè)后視鏡和車尾,以影像方式監(jiān)控車輛后方是否有來車,但采用影像的技術(shù)方式,在惡劣天氣(大雨、大霧等)下就會(huì)表現(xiàn)不佳,極易產(chǎn)生誤判。
雷達(dá):盲點(diǎn)監(jiān)測系統(tǒng)使用的雷達(dá)主要為24 GHz和77 GHz的短波雷達(dá),將雷達(dá)安裝于車側(cè)或后保險(xiǎn)杠處,通過發(fā)出微波偵測車輛兩側(cè)及車尾來車,在車輛行駛速度大于10KM/H自動(dòng)啟動(dòng),實(shí)時(shí)向左右3米后方8米范圍,發(fā)出探測微波信號(hào),系統(tǒng)對反射回的微波信號(hào)進(jìn)行分析處理,即可知后面車輛距離,速度和運(yùn)動(dòng)方向等信息,通過系統(tǒng)算法,排除固定物體和遠(yuǎn)離的物體,當(dāng)探測到盲區(qū)內(nèi)有車輛靠近時(shí),指示燈閃爍,此時(shí)駕駛員看不到盲區(qū)內(nèi)的車輛,但是也能通過指示燈知道后方有車輛駛來,變道有碰撞的危險(xiǎn),如果此時(shí)駕駛員仍然沒有注意到指示燈閃爍,打了轉(zhuǎn)向燈,準(zhǔn)備變道,那么系統(tǒng)就會(huì)發(fā)出“嗶嗶嗶”的語音警報(bào)聲,再次提醒駕駛員此時(shí)變道有危險(xiǎn),不宜變道。通過整個(gè)行車過程中,不間斷地探測和提醒,防止行車過程中因惡劣天氣,駕駛員疏忽,后視鏡盲區(qū),新手上路等潛在危險(xiǎn)而造成交通安全事故。相較于采用影像的技術(shù)方式,雷達(dá)的方案不受天氣的影像,且微波不依賴于空氣傳送,因此微波的偵測能力和車輛的行駛速度也沒有關(guān)聯(lián)。
盲點(diǎn)監(jiān)測系統(tǒng)是現(xiàn)有高級(jí)輔助駕駛系統(tǒng)中應(yīng)用比較普遍的一種技術(shù),隨著技術(shù)的發(fā)展,自動(dòng)駕駛時(shí)代終究會(huì)到來,在自動(dòng)駕駛技術(shù)普及后,盲點(diǎn)監(jiān)測系統(tǒng)還有存在的意義嗎?從前文我們可以了解到,盲點(diǎn)監(jiān)測系統(tǒng)的本質(zhì)還是通過監(jiān)測車輛兩側(cè)及后部盲區(qū)是否有車輛進(jìn)入,從而通過聲音或光亮來提醒駕駛員行車安全,主要還是輔助駕駛員駕駛的一種技術(shù)。自動(dòng)駕駛實(shí)現(xiàn)的前提是車輛的駕駛過程無需駕駛員的參與,在那時(shí),盲點(diǎn)監(jiān)測系統(tǒng)是否還有存在的必要?
筆者認(rèn)為,在自動(dòng)駕駛技術(shù)普及后,車輛行駛的任務(wù)被交由了車輛自身,道路路況的識(shí)別依舊十分重要,對道路的多樣化監(jiān)測,將確保車輛自動(dòng)駕駛時(shí)的安全。盲點(diǎn)監(jiān)測系統(tǒng)也會(huì)隨著自動(dòng)駕駛技術(shù)的升級(jí)轉(zhuǎn)變?yōu)榱硪环N形式。
在L4級(jí)別自動(dòng)駕駛時(shí),車輛雖然可以實(shí)現(xiàn)自主駕駛的功能,但還是需要安全員來輔助識(shí)別路況,在出現(xiàn)必要狀況時(shí),還是需要安全員來接管車輛,此時(shí)盲區(qū)監(jiān)測系統(tǒng)將會(huì)和現(xiàn)在一樣發(fā)揮自身作用,當(dāng)車輛盲區(qū)出現(xiàn)車輛或行人時(shí),依舊會(huì)通過聲光來提醒安全員,從而確保車輛駕駛的安全。
當(dāng)自動(dòng)駕駛技術(shù)達(dá)到L5級(jí)別時(shí),安全員的角色也不再需要,此時(shí)盲區(qū)監(jiān)測系統(tǒng)將會(huì)轉(zhuǎn)變?yōu)榈缆繁O(jiān)測系統(tǒng),不斷進(jìn)行道路狀況的監(jiān)測,給車輛提供更完善的道路狀況,聲光提醒也將消失,車輛將自主實(shí)現(xiàn)車輛兩側(cè)及后方來車的識(shí)別,給系統(tǒng)進(jìn)行路況數(shù)據(jù)采集,以便讓系統(tǒng)做好駕駛預(yù)判,給乘客提供完善的自動(dòng)駕駛服務(wù)。高級(jí)輔助駕駛系統(tǒng)的發(fā)展將是逐漸遞進(jìn)的,現(xiàn)有的高級(jí)輔助駕駛系統(tǒng)更多是輔助駕駛員安全行駛,隨著自動(dòng)駕駛技術(shù)的提升,這些輔助駕駛員行駛的高級(jí)輔助駕駛系統(tǒng)也將得到技術(shù)的提升,轉(zhuǎn)變?yōu)樽詣?dòng)駕駛技術(shù)中另一種技術(shù)方向。
-
監(jiān)測系統(tǒng)
+關(guān)注
關(guān)注
8文章
2735瀏覽量
81387 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13877瀏覽量
166618
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
AUTOSAR通信對自動(dòng)駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計(jì)
淺析基于自動(dòng)駕駛的4D-bev標(biāo)注技術(shù)

一文聊聊自動(dòng)駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛識(shí)別技術(shù)有哪些
中級(jí)自動(dòng)駕駛架構(gòu)師應(yīng)該學(xué)習(xí)哪些知識(shí)
初級(jí)自動(dòng)駕駛架構(gòu)師應(yīng)該學(xué)習(xí)哪些知識(shí)
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論