

因為多傳感器的使用會產生大量需要處理的數據,因此通常通過融合算法來對數據進行優化。不同傳感器采集到的信息可能相互之間可能會不同甚至是有矛盾,使用融合算法可以幫我們弄懂如何保證系統能夠準確處理這些數據,使系統最終做出及時、正確的決策,這非常重要。
何為多傳感器融合算法?
融合算法不僅需要處理數據的多樣性和復雜性,而且需要提高實時性和精度。雖然多傳感器數據融合算法目前沒有完整的理論體系,但是對于多種不同領域的應用,已經提出許多成熟且有效的融合算法。融合算法可以概括為隨機、人工智能兩大類。隨機類融合算法有加權平均法、卡爾曼濾波、多貝葉斯估計法等,人工智能類融合算法有模糊邏輯、神經網絡等。在自動駕駛中,常用的融合算法包括加權平均法、卡爾曼濾波法、神經網絡。這三種方法具有直觀性、容錯性及普適性。
加權平均法
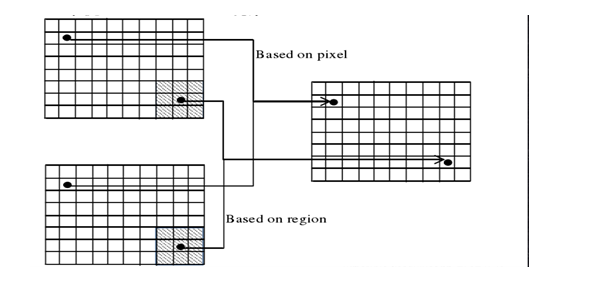
加權平均法融合數據信息可以通過獲取各種傳感器信號的平均值來實現。若某一個傳感器的信號比其它傳感器更可信,則為該傳感器分配更高的權重,以增加其對融合信號的貢獻。加權平均法是信號級融合最簡單、最直觀的一種算法,可以對傳感器接收到的冗余信息進行加權平均。加權平均法可以對原始數據直接進行使用。通過加權平均法,可以在圖像識別中對模糊圖像進行處理,使圖像識別更加清晰與準確。
卡爾曼濾波
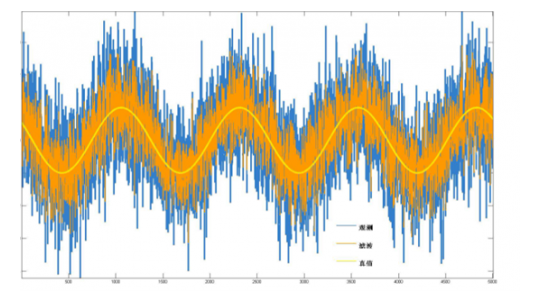
卡爾曼濾波是一種常用的自適應傳感器融合算法,用于消除系統中的冗余,預測系統的狀態。卡爾曼濾波采用一個線性空間模型,系統的當前狀態取決于先前的狀態。卡爾曼濾波狀態空間模型為:
Xk=AXk-1+Bu+Gw(1)
Zk=HXk+v(2)
式中:Xk為k時刻狀態向量;Xk-1為k-1時刻狀態向量;A為狀態轉移矩陣;B為輸入轉換矩陣;G為過程噪聲轉移矩陣;u為輸入向量;w為過程中噪聲向量;Zk為k時刻系統測量信息;H為測量矩陣;v為測量噪聲向量。卡爾曼濾波在圖像識別中是一種常見的融合算法,可以進行降噪,并增強魯棒性。卡爾曼濾波雖然是數據層面的融合,但是對于傳感器的融合而言非常重要。
神經網絡
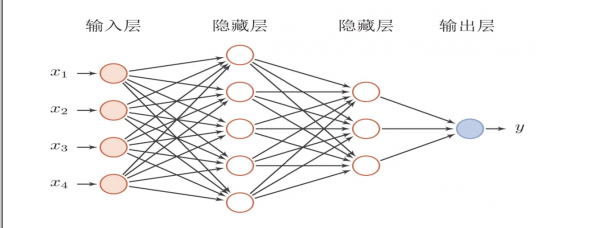
不同于卡爾曼濾波,神經網絡提供非線性傳遞函數和并行處理能力,可以幫助執行圖像融合。神經網絡由稱為神經元的處理節點連接而成。建立神經網絡數據融合模型,根據多傳感器數據輸入和輸出之間的關系,分配神經元和互連權值。神經網絡既有多層前饋型,也有遞歸型。神經網絡融合輸出信號和輸入信號,計算相應的權重y:
y=∑wixi(3)
式中:wi為權重;xi為傳感器數據。
傳統神經網絡將圖像一層一層映射,最后進行特征提取。目前,多用卷積神經網絡進行融合。卷積神經網絡可以看作是特征提取與分類器的結合體,單從各個層的映射來看,類似于特征提取的過程,提取不同層次的特征。神經網絡的容錯性很強,能夠用于復雜的非線性映射環境。神經網絡強大的容錯性及自學習、自組織、自適應能力等特性,滿足多傳感器數據融合技術處理的要求。神經網絡在數據模型中,主要根據當前系統所接受的樣本相似性確定分類標準,這一過程表征為網絡的權值分布。可以利用神經網絡的信號處理能力和自動推理功能,實現多傳感器數據融合。如圖為四層神經網絡模型。
結語:
在自動駕駛技術中,如何使用融合算法以及如何選擇合適的算法非常重要,需要根據所選擇的傳感器以及融合體系分類等原因綜合考慮,合理使用融合算法,可以事半功倍,因此在自動駕駛領域,人們要花很多很多時間去解決算法問題。
-
神經網絡
+關注
關注
42文章
4811瀏覽量
103006 -
多傳感器
+關注
關注
0文章
81瀏覽量
15593 -
融合算法
+關注
關注
0文章
14瀏覽量
8409
發布評論請先 登錄
傳感器數據融合算法python代碼
【飛騰派4G版免費試用】Spring Boot和飛騰派融合構建的農業物聯網系統-數據融合算法篇
Spring Boot和飛騰派融合構建的農業物聯網系統-改進自適應加權融合算法
【TL6748 DSP申請】基于TMS320C6748的傳感器數據融合算法實現
姿態融合算法是什么
多傳感器分組加權融合算法研究
一種異質多傳感器的異步量測融合算法驗證






 工商網監
工商網監

評論