 協作機器人:為生產力和安全而設計
協作機器人:為生產力和安全而設計
工業機器人在工廠中很常見,因為它們為重復性、大批量裝配線任務提供了體力勞動者的有效替代方案。機器可以連續多年重復執行高精度任務,而只是偶爾中斷日常維護。提高生產力確保了初始高資本投資的回報。
但相對低成本的人工仍然是小批量、高混合、復雜裝配工作的最佳選擇,因為他們靈巧、靈活,并且可以解決可能導致機器停機的問題。協作機器人——輕型、緊湊且相對便宜的全尺寸工業機器人的近親——現在被引入以將機器人的優勢與人類的資產相結合。然而,由于協作機器人與人類共享工作空間,新的工程技術必須在保證工人安全的同時最大限度地提高生產力。讓我們來看看協作機器人和人類如何作為同事進行協作。
共享工作區
協作機器人填補了制造環境中的一個利基市場,在這個環境中,產品組合正在整合,產量增加,但沒有達到完全自動化的程度。協作機器人可以進行零件的揀選、提升和抓取以及重復的常規動作,而人類則可以處理該過程中復雜的制造和智力挑戰。
協作并不是傳統工業機器人的自然延伸。國際標準化組織 (ISO) 將工業機器人定義為“一種自動控制、可重新編程、多用途的機械手,可在三個或更多軸上編程,可以固定到位或移動以用于工業自動化應用。” 該描述適合專為在沒有人工幫助的情況下實現最大生產力而設計的機器。
毫不奇怪,自從 1970 年代引入工業機器人以來,工廠車間的一個部門一直是其大批量應用的安全自動化的要求。今天,工人遠離,機器被封閉在金屬屏障后面,以消除快速移動和重型機械部件帶來的危險(圖 1)。當有人或某物穿過光束或通過打開屏障觸發開關時,基本的外部傳感器技術會引發工業機器人的緊急停止。當技術人員有意進入機器人的操作范圍進行維護或重新編程時,機器會斷電,手臂鎖定在安全位置。
最大限度地提高速度、強度和精度對于協作機器人仍然很重要,但為了最大限度地發揮協作工作的優勢,人類和機器人需要協調工作。為了證明引入協作機器人的合理性,它的成本必須不超過相當于人工的成本。如果人類同事仍然將之前的兩到三個工件組裝在一起,那么將零件移動到位并添加快干粘合劑的機器人幾乎沒有價值。但更重要的是,協作機器人必須不斷了解人類的位置、移動方式以及接觸時(無論是有意還是無意)所施加的力,以確保安全工作。
協作機器人的關鍵設計目標可以概括為:
- 與人類工人和精密裝配設備的安全互動
- 降低成本以證明使用機器人勞動力應用的合理性
- 以與人類能力相適應的速度進行機器人操作
- 清潔和低噪音操作
- 緊湊輕巧的外形
- 由非專業工人進行簡單快速的編程,以應對多品種生產
協作機器人系統設計指南
協作機器人設計的關鍵因素與機器和人類共享相同工作空間的事實有關(圖 2)。設計人員需要確保效率高,并且協作機器人不斷意識到其同事有時不可預測的動作并能夠安全地做出反應。設計人員還需要確保協作機器人在其與人類之間有意或無意的接觸時不會施加過大的力。這增加了復雜性。與安全系統不是機器人固有部分的工業機器人不同,協作機器人包含通常集成到其結構中并由其系統控制的安全系統。
幸運的是,針對這些設計挑戰的指導以協作機器人的國際安全標準的形式出現,這些標準是與這些機器人在工作場所的快速引入同時制定的。例如,ISO 在其ISO 10218文檔中提供了一些設計協作機器人的指南。該組織創建的技術規范 (TS) ISO/TS 15066 側重于協作機器人的安全性。ISO/TS 15066 強調了與安全相關的控制系統完整性在控制過程參數(如速度和力)方面的重要性。(注:ISO/TS 15066 是一個自愿性文件,不是標準。但是,它有望成為未來標準的基礎。)
ISO/TS 15066 還提供了供協作機器人設計者使用的一般信息,例如解釋需要對工作空間中的危害進行風險評估的信息。例如,即使是最好的機器人設計也不能被認為是安全的,如果它允許機器人用它的機械手圍繞一個尖銳的物體揮動。在另一個示例中,如果工作空間被固定物體封閉,導致工人被困然后被機器人運動壓碎,則工作空間可能很危險。
ISO/TS 15066 的關鍵部分涉及工作空間的設計、機器人操作的設計以及機器人協作和非協作操作之間的轉換。具體來說,該文件提供了實現以下協作操作要求的詳細信息,從而創建了滿足上述設計目標的安全、高效的解決方案:
安全等級監控停止
安全等級的監控停止是在不切斷電源的情況下確保機器人停止,并在人類工作人員進入協作工作區時發生。該系統確保機器人和人類不會同時移動,主要用于機器人在工作空間中快速移動重型部件時使用。
在開始手動操作之前,機器人必須執行安全級別的監控停止。在操作過程中,工人與機械臂直接接觸,并可以使用手動控制來移動它。此操作用于提升輔助或高度可變的工具應用。
速度和分離監測
這種協作工作方法可能是最相關的,因為它允許操作員和協作機器人通過為協作機器人配備傳感器來監控工人的接近度,從而在工作場所內同時移動。在較大的間隔中,協作機器人繼續以中等速度運行,但在更接近時,協作機器人會降低其速度。在非常接近的情況下,它會達到一個完整的安全等級監控停止。
力量和力量限制
當協作機器人(或任何工件)和工作人員都在協作工作空間中時,在應用中需要限制功率和力。接觸可以是準靜態的,例如將工人身體的一部分夾在協作機器人的機械手和固定物體之間,也可以是瞬態的,例如撞到同事身體的某個部位,工人可以后坐。
設計安全挑戰
通過對成本、尺寸和復雜性進行一些調整,協作機器人設計人員可以將現有的工業機器人技術用于某些系統,同時仍然可以實現前面描述的工作方法。例如,安全等級監控停止是工業機器人的一項成熟技術,當人類進入操作范圍時,它使用安全屏障實現緊急停止。
速度和分離監控需要新的工程技術,考慮到工業機器人的設計目的是在有人闖入工作區時完全停止。相比之下,當工人共享工作空間時,協作機器人將繼續移動,盡管速度會降低,除非方法足夠接近以觸發安全等級的監控停止。實施此類系統的關鍵是將傳感器集成到協作機器人的控制系統中,以便在需要減速時,閉環反饋能夠實現快速的電機響應。
但最困難的設計挑戰是功率和力限制。設計師可以從工業機器人設計中學到很少的東西,因為它的重點是負載能力和速度。ISO/TS 15066 的附件通過建議對疼痛閾值的準靜態和瞬態力以及人類的輕微、可逆和不可逆損傷閾值的限制來提供幫助。瞬態力閾值可能是準靜態力閾值的兩倍,因為它們發生在較短的時間范圍內,并且工人可以后坐力。
盡管關于疼痛和損傷閾值的研究仍在繼續,但目前的指南建議通過在速度和分離監測操作期間將協作機器人的速度降低到低于 250mm/s 并將其力降低到低于 150N 來降低夾緊風險。但是,瞬態力可以是兩倍高,但施加時間不得超過 500 毫秒。
達到這些門檻具有挑戰性。例如,一個 2kg 的機械臂承載 0.5kg 的負載并以 1m/s 的速度移動,如果發生意外接觸,必須以 60m/s2 的速度減速,以將其破碎力限制在 150N 以下。在那個時候,手臂會移動8mm,這對于協作操作來說是可以接受的。承載 3kg 負載的相同機械臂需要以 19m/s2 的速度減速,以將其壓碎力限制在 150N 以下,在此期間它會移動 27mm(這對于填充物來說是可以接受的)。此示例說明機器人設計人員必須考慮由具有不同有效載荷和移動速度能力的協作機器人產生的不同動態力。
ISO 指南中的其他建議包括:
- 消除機器人上的夾點和擠壓點
- 減少機器人慣性和質量
- 當機器人接近固定表面時降低機器人速度,使其可以快速停止
- 增加接觸點的表面積
- 組織工作空間布局以限制夾緊點并允許在瞬態碰撞后反沖
案例研究:協作機器人關節
協作機器人設計的一個主要挑戰是設計輕巧、緊湊的關節,這些關節可以對作用在機械手上的力(例如與同事的撞擊)做出快速反應,以消除受傷的風險。
諧波齒輪正受到小型機器人的青睞,因為與傳統嚙合齒輪相比,它們使設計人員能夠減小關節尺寸和重量(圖 3)。然而,由于諧波齒輪使用撓性在輸入和輸出之間傳遞運動,因此與嚙合齒輪替代品相比,該關節表現出較低的旋轉剛度。
缺乏剛度給協作機器人設計者帶來了一個問題,因為檢測人和機器人之間的碰撞的首選方法是通過電機電流產生的變化,也就是說,由于碰撞產生的力導致電機扭矩成比例變化. 但是缺乏剛度會導致力在對電機扭矩產生任何影響之前將接頭中的松弛部分收起。其結果是在控制器檢測到電機電流增加并可以通過減慢、停止或反轉操縱器來響應沖擊之前出現時間滯后。這樣的延遲可能會導致同事受到大于建議的 500 毫秒瞬時沖擊時間和 300N 的最大沖擊力。
機械解決方案是使用更大的諧波齒輪來提高剛度,但這會增加機器人關節的尺寸和重量。另一種方法是使用雙高分辨率編碼器和軟件算法。這樣的解決方案會導致少量的成本增加,但不會增加接頭的尺寸或增加其重量。
關節輸入側和輸出側的編碼器將為控制器提供實時測量,以測量機器人的實際位置和編程位置之間任何缺乏??剛度引起的旋轉偏差。控制器可以快速計算誤差的一階補償,消除系統的松弛,并確保通過增加的電機扭矩立即檢測到對機械手的有意或無意的影響。
結論
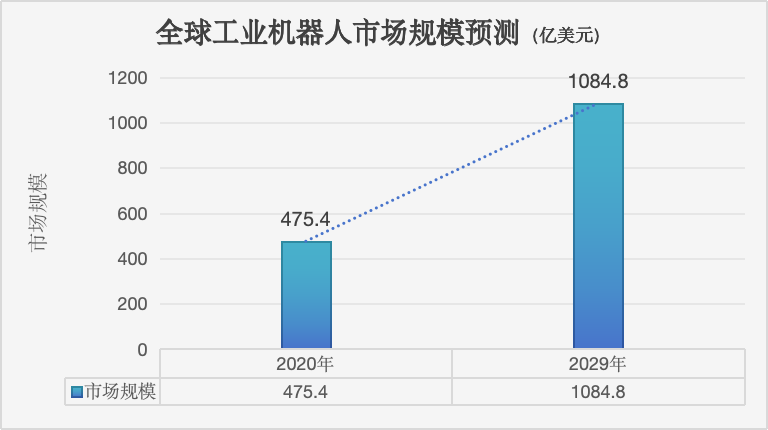
協作機器人在與人類共享的工作空間中留下了自己的印記,將機器人的肌肉與人類的靈巧相結合,解決問題的能力正在顯著提高生產力。工廠經理最近才開始意識到協作機器人可以執行的裝配應用程序的數量——目前完全由人工完成。這就是為什么協作機器人的影響預計會增加的原因,預計到 2025 年增長預期將大致等于當今工業機器人總量的規模。
但這項技術還為時過早,工程師們現在了解到,只有工程工業機器人中使用的一些設計技術真正適用于他們的協作表親。需要一種新的設計方法來確保協作機器人在同事周圍保持安全,同時仍然為工作帶來速度、精度和負載處理優勢。
設計協作機器人是一門新興學科,幾乎沒有可借鑒的指導。但是,在將第一波模型引入工作場所的同時,正在制定協作機器人的國際安全標準。ISO 10218 標準為協作機器人提供了具體的指導方針,而 ISO/TS 15066 為協作操作建立了安全參數。供應商正在盡自己的一份力量,將電子設備和傳感器與先進的機械組件結合起來,以創建新的關鍵組件,例如專門針對協作機器人在日常工作、操作和交互過程中的獨特需求而設計的專用關節。
審核編輯:符乾江
-
自動化
+關注
關注
29文章
5564瀏覽量
79246 -
工業機器人
+關注
關注
91文章
3361瀏覽量
92630 -
協作機器人
+關注
關注
2文章
489瀏覽量
30131
發布評論請先 登錄
相關推薦
協作機器人TM25S:高效人機協作改變傳統作業方式

優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
聚焦培育新質生產力,小笨智能深耕服務機器人賽道
加速生產數據向AI機器人轉化,剖析NVIDIA機器人堆棧式資源
工業機器人加速推動“新質生產力” ,穩石機器人助力打造企業高質量發展新引擎

工業4.0中的機器人向協作機器人演進
協作機器人上下料在醫療器械生產中的精準應用

PCB行業:用協作機器人,就選大族機器人
新質生產力的新和質
新質生產力哪些行業發展最好 如何提升新質生產力
【TE Perspective】協作機器人在工廠自動化中日益增長的作用

科聰協作科聰協作(復合)移動機器人整體解決方案






 工商網監
工商網監
評論