 看懂激光雷達探測及三維成像
看懂激光雷達探測及三維成像
1 引言
激光雷達是一種可以精確、快速獲取目標三維空間信息的主動探測技術。三維成像激光雷達作為一種主動成像系統,與被動成像系統相比具有可獲得高精度距離信息以及不受光照條件限制的優勢;與微波成像系統相比,具有角分辨力高、測量精度高、抗干擾能力強以及系統易小型化的優點;在目標識別、分類和高精度三維成像及測量方面有著獨特的技術優勢,因而被廣泛應用于軍事、航空航天以及民用三維傳感等領域。
自上世紀六七十年代起,隨著激光技術和探測器件的發展,發達國家率先在激光雷達三維成像領域進行了研究,各種距離測量技術和三維成像體制蓬勃發展。激光雷達三維成像系統按照成像體制可以分為掃描式成像系統和面陣成像系統兩種,按激光距離測量體制可以分為直接脈沖測距、相位式測距以及線性調頻測距等類型。不同體制的激光雷達三維成像系統具有不同的優缺點,本文就這些成像體制的原理、特點以及國內外發展現狀進行了總結和梳理。
激光三維成像本質上是通過測量光脈沖或調制信號往返于雷達和目標之間的飛行時間來獲得距離信息(Z軸),同時通過掃描或者多點對應測量獲得垂直于光束方向平面內的方位信息(X、Y軸),因此,在對激光成像體制探討之前,有必要對激光測距的基本原理進行了解。
2 測距原理
激光雷達要實現目標距離測量,必須確保能夠接收到足夠的回波信號,而計算激光回波信號的依據則是激光雷達方程,通用的激光雷達方程:

其中:PR是接收回波功率,PT是發射激光功率,Pb是背景輻射和噪聲功率;R是目標與雷達之間距離,θT是發射天線視場角/光束發散角;ρ是目標表面對激光的反射率,dA是目標表面面元,Ω是目標光散射立體角;D是接收天線孔徑/直徑,ηAtm是傳輸介質的雙程透過率,ηSys是光學系統透過率。
其直觀物理意義:
 為激光發射功率分攤在被光斑覆蓋到的目標表面積上的部分,∫ρdA為目標將該部分照射功率向外散射的總散射功率,
為激光發射功率分攤在被光斑覆蓋到的目標表面積上的部分,∫ρdA為目標將該部分照射功率向外散射的總散射功率, 為目標散射功率被雷達天線孔徑接收的部分;在這整個過程中還需要考慮光信號功率在雷達系統內部和自由空間中傳播的損耗。由式(1)可見,在外部條件一定的情況下,激光發射功率越高,接收孔徑越大,背景噪聲抑制越好,系統的信噪比越高,這也是雷達系統設計的要點。
為目標散射功率被雷達天線孔徑接收的部分;在這整個過程中還需要考慮光信號功率在雷達系統內部和自由空間中傳播的損耗。由式(1)可見,在外部條件一定的情況下,激光發射功率越高,接收孔徑越大,背景噪聲抑制越好,系統的信噪比越高,這也是雷達系統設計的要點。
激光測距的方法有很多種,除了直接利用計時電路對激光脈沖的飛行時間進行測量外,還可以通過對發射激光信號的幅值、頻率、相位等進行調制,從而間接獲得目標的距離。目前較為常用的激光測距技術大致可以分為直接脈沖飛行時間探測、幅度調制連續波探測以及頻率調制連續波探測三種。除直接探測技術外,相干探測也可用來進行測距,但相干探測一般用于相對位移測量,在絕對距離測量上存在較多問題,在三維成像中較少應用,這里不對其展開論述。
2.1 直接脈沖飛行時間探測
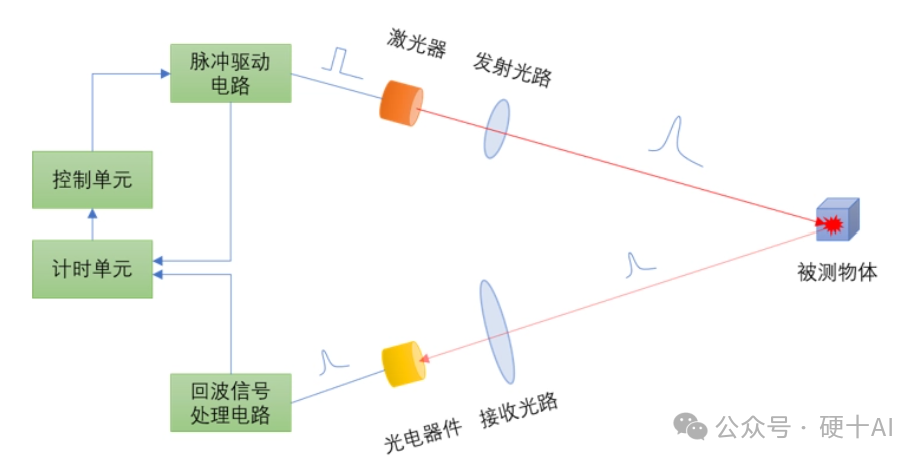
直接脈沖飛行時間探測顧名思義就是直接測量激光脈沖從發射到經目標散射后返回雷達的往返時間t,已知激光在大氣中的傳輸速度c,得到被測目標的距離r=ct/2,如圖1所示。根據雷達系統選擇線性探測器或者單光子探測器,又可以將直接脈沖測距技術細分為線性探測和光子計數探測。
線性探測模式下,探測器的電脈沖響應與入射光強呈線性關系,可以采用恒比定時、閾值鑒別法等高精度時間測量技術獲得激光脈沖的往返飛行時間。而在光子計數探測模式下,探測器工作在蓋革模式,具有單光子級靈敏度,一個信號光子即能觸發一次電脈沖響應,但此時探測器只能響應回波信號的有無,不能提供信號的強度信息。光子計數模式一般用于遠距離探測,回波信號弱,光子數很少,此時探測器對回波信號的響應可以認為服從泊松分布,當入射到探測器的信號和噪聲的總光電子數為m時,理論上產生k次光子事件的概率密度為

至少有一次光子事件發生即代表探測器響應到回波信號,因此探測到信號或噪聲光子事件的概率為

對于線性探測器,其輸出的回波信號為隨時間變化的電壓值,經過A/D采樣后,每一發激光脈沖都能獲得一個隨時間變化的回波波形,探測電路帶寬足夠高時能夠獲得目標縱深剖面的回波強度輪廓,又稱為全波形探測,在信噪比足夠高時能夠獲得更為豐富的目標信息。對于線性探測的激光雷達回波信號,我們關注的是回波功率與信噪比,為了獲得更遠的探測距離系統應提高發射脈沖的峰值功率,同時降低探測電路的噪聲。
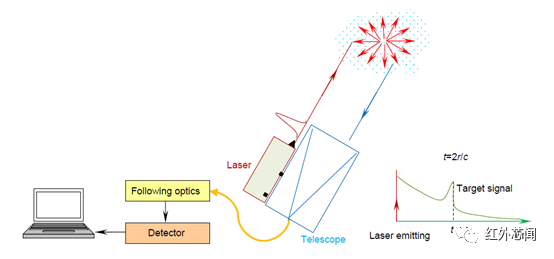
圖1 激光雷達探測示意圖
與線性探測相比,光子計數探測更高的靈敏度使得其在遠距離或者微弱信號探測領域的應用越來越廣泛。對于光子計數的激光雷達回波信號,我們關注的是回波光子數與噪聲計數,為了獲得更遠的探測距離系統應提高發射脈沖的單脈沖能量,同時抑制噪聲光子計數,而對于工作在白天的激光雷達系統來說,噪聲光子中占主導地位的是日光背景噪聲計數,因此采用窄帶寬、高帶外抑制的光學濾波器件,同時盡量減小接收光學系統的接收視場角是光子計數探測激光雷達系統的關鍵。
對于探測靈敏度極高的光子計數探測激光雷達,也稱為“單光子”探測激光雷達,這是指其接收靈敏度達到了能夠響應單個光子能量的程度,但實際上,僅僅能夠響應單個光子是不足以完成實際探測的,因為系統必然會存在噪聲,如探測器的暗計數、背景噪聲計數等,必須要把實際的回波光子計數與這些噪聲計數區分開來才能實現探測,這可以通過系統的優化設計以及信號處理算法的改進來實現。
直接脈沖測量激光雷達發射的一般為納秒級脈寬的激光脈沖,優點是作用距離遠、探測時間短,理論上單發脈沖即可完成測距,尤其隨著光子計數探測器的發展與成熟,使得雷達系統可以實現上百公里甚至上千公里的測量;缺點主要是其測距精度相對較低(主要受限于發射激光脈沖寬度和探測器響應時間抖動),一般可以達到厘米量級,不適合要求毫米甚至亞毫米量級的高精度測量領域。
2.2 幅度調制連續波探測
幅度調制連續波(Amplitude modulationcontinuouswave,AMCW)激光雷達一般又被稱為相位式激光雷達,與直接脈沖探測不同,其發射的是連續激光信號,并對激光發射信號的幅值進行調制,通過檢測回波信號與發射信號之間的相位差來進行測距。如圖2所示,當正弦信號的調制頻率為f時,可以測到發射信號與接收信號的相位差為

因此,目標的距離即為

由于鑒別的相位差只能在0~2π之間,超過2π的整周期將會帶來距離模糊的問題。并且,當測量電路的鑒相精度一定時,發射信號的調制頻率與雷達測距精度成正比,與探測的最大不模糊距離成反比。因此,雷達的探測距離與測距精度之間是相互矛盾的。為了解決這一問題,相位式激光雷達通常采用多個調制頻率同時發射,通過較高的調制頻率提高測距精度,通過較低的調制頻率提高系統的最大不模糊距離,又稱為“多測尺”測量。
相比于直接脈沖測量技術,相位式測距精度較高,一般可達毫米量級,但由于其發射的是連續信號,平均功率遠低于脈沖信號的峰值功率,這就限制了系統的探測距離。另外,由于其必須采集完整的周期信號,這就使系統的探測時間較長。
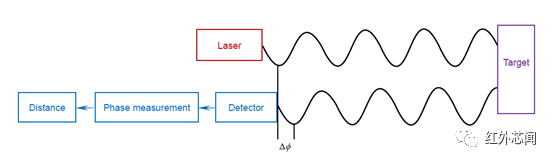
圖2 幅值調制相位測距原理
2.3 頻率調制連續波探測
頻率調制連續波(Frequency modulatedcontinuous wave,FMCW)探測是上世紀末發展的一種較新的測距體制[8-9],它調制的是發射激光的光頻率(波長),可以避免幅值調制帶來的發射功率損失。對于頻率調制激光雷達,由于回波信號與發射信號存在時間差t,將回波信號與本振信號進行混頻后,通過平衡探測器就可以得到他們的差頻信號fif:

其中:r為目標距離,B為調制帶寬,T為調制信號的周期。
當對發射的信號進行對稱三角波線性調頻時,可以同時獲得被測物體的距離和速度信息。當目標或激光雷達平臺在波束往返時間內運動時,受多普勒效應影響拍頻信號也會發生偏移。因此,通過提取“上啁啾”和“下啁啾”的拍頻頻率,可以確定目標距離和速度。由式(6)可以得到目標的距離:
式中:f if +為上變頻的差頻信號頻率,f if?為下變頻的差頻信號頻率。
同時能夠得到被測物體在雷達視線方向的相對速度:
式中:λ為發射激光的波長,df為多普勒頻移。
相比于AMCW技術,FMCW技術沒有調制功率損失且測距精度更高,調制帶寬足夠高時其測距精度甚至能夠達到微米量級,其突出的優點是能夠同時進行目標距離和多普勒徑向相對速度的測量。其缺點為調頻激光器較為昂貴,系統成本高,激光調制過程存在非線性效應,校正過程加劇了系統復雜程度。另外,由于其調制的是光頻率對于高精度測距必須考慮傳輸介質的色散影響,并進行補償。
3 激光雷達三維成像
激光三維成像可以理解為是對每個二維像素點的激光測距,在單點激光測距的基礎上,對每個測距點的方位信息同步進行測量,即可實現三維成像。而方位信息的獲取可以通過單點掃描和面陣器件成像兩種方式。
3.1 掃描式三維成像激光雷達
掃描式三維成像激光雷達由單點激光測距系統配以光束掃描裝置構成,是目前發展相對成熟的三維成像激光雷達技術,在地形測繪、大氣環境檢測、導航和防撞、空間交會對接、汽車自動駕駛等領域的應用十分廣泛。掃描式激光雷達要求實現每個點的快速測距,因此大多采用直接脈沖探測的方式。
掃描裝置的作用是控制雷達光軸指向不同方向,依次測量目標上各點的距離,同時記錄光束指向的方位-俯仰角,這樣就可以得到目標的距離-角度-角度圖像(rang-angle-angle),又稱為三維圖像。需要注意的是,激光雷達系統一般同時存在兩個相互平行的光軸,即發射光軸和接收光軸,掃描裝置必須能夠同步對這兩個光軸進行掃描,因此一般掃描式雷達多設計為發射-接收同軸,并且為了保證接收到足夠的回波功率,掃描鏡的光學有效孔徑不能過小,這在很大程度上限制了系統的掃描速度。為了提高系統的掃描速度,在單點掃描的基礎上,人們發展了線掃描、點陣掃描等方式。
目前,可用于激光雷達系統的掃描方式中較為成熟的是機械式掃描,主要有擺鏡掃描、萬向節掃描、轉鏡掃描、雙光楔掃描等類型,通過電機驅動鏡面轉動,并利用幾何光學的原理實現光束的偏轉,具有大掃描視場和高掃描效率,是近些年最常見、應用最廣泛也是最成熟的成像激光雷達掃描方式。
其中MEMS掃描是最新發展的一種掃描方式,其通過微型反射鏡的快速振動來實現光束掃描,掃描速度較傳統的機械掃描可以大幅提高,同時很好地克服了機械掃描系統體積大的缺點,可以實現系統的小型化,因其掃描結構“微觀”化,無可見的機械運動部件,所以也被稱為“混合固態”掃描方式,目前仍存在接收光路較為復雜,微振部件影響系統使用壽命的缺陷。
對于MEMS掃描方式,最大的問題是,若采用收發同軸掃描的方式,則受微型反射鏡尺寸的限制,其接收光學口徑較小,探測距離受限;而若采用發射掃描、大視場接收的方式,則背景噪聲過強,同樣導致探測距離受限。
雙光楔掃描通過兩塊具有一定楔角的光學平板繞光軸轉動來實現折射光束的空間偏轉,適用于較大口徑的激光雷達系統,一般用于遠距離探測成像。另外,近年來光學相控陣技術(optical phase array,OPA)的發展為激光發射光束的快速掃描提供了一種新的手段,然而激光雷達除發射外還需對回波信號進行同步接收,目前技術上還有待成熟。掃描成像激光雷達從搭載平臺來看主要分為星載掃描成像激光雷達、機載掃描成像激光雷達、車載成像激光雷達等。
3.1.1 星載成像激光雷達
星載掃描成像激光雷達主要用于空間交會對接、飛行器的導航著陸以及星載對地三維成像等。2005年MDA Space Mission以及2013年中國科學院上海光學精密機械研究所均提出使用二維掃描鏡作為掃描機構,如圖3 所示,分別具有10°×10°、30°×30°、120°×120°的最大掃描視場角,并利用二維掃描鏡掃描角度可調的特點,實現空間自主捕獲、定位和追蹤合作目標,激光雷達系統工作距離覆蓋范圍從十幾米到十幾千米。
2011 年歐洲航天局(The European Space Agency)提出使用萬向節作為掃描機構,實現了20°×20°的掃描角度,成像幀頻不小于1Hz,如圖4所示。機械掃描三維成像激光雷達因其體積小、質量輕、功耗低、精度高、技術成熟等優點,廣泛應用于空間交會對接和飛行器導航著陸。
我國的空間交會激光雷達雖然起步較晚,但發展迅速,由中國科學院光電技術研究所和中電科27所聯合研制的激光雷達已多次成功應用于我國空間站和神舟系列飛船的交會對接,技術指標已達國際領先水平。美國國家航天局(NASA)一直致力于發展地球觀測系統,測量冰蓋質量平衡、冰蓋高度和海冰厚度,云和氣溶膠高度,以及陸地地形和植被特征等研制的ICESat和ICESat2星載激光雷達成像系統均已成功發射,完成既定任務。
ICESat在單像素測距的基礎上,利用衛星平臺的運動,實現對地表的單點掃描成像。ICESat于2003年1月13日發射成功,采用線性探測體制,在軌工作7年后,于2010 年由于主要載荷失效最終導致任務終結,完成了對地球表面絕大部分地區的激光測繪工作。ICESat2同時發射三對六束激光,采用光子計數探測,每對間隔3.3km,沿軌光斑間隔70cm,測量地形高度變化小于4mm。
ICESat2已于2018年9月15日發射成功,預計在軌工作3年。為了實現更高的橫向測量精度,NASA正在研制LIST(LiDAR surface topography)雷達系統,其采用1000像元的光子計數探測器方案,將能夠實現5m的橫向分辨率和分米級的測距精度。圖5為NASA星載激光雷達系統發展路線圖。

圖3 (a)MDA Space Mission和Optech公司聯合設計的星載激光雷達;(b)中國科學院上海光學精密機械研究所提出的星載激光雷達系統
圖4 歐洲航天局設計的星載激光雷達系統
為了實現更高的橫向測量精度,NASA正在研制LIST(LiDAR surface topography)雷達系統,其采用1000像元的光子計數探測器方案,將能夠實現5 m 的橫向分辨率和分米級的測距精度。圖5為NASA星載激光雷達系統發展路線圖。
星載激光雷達平臺運行軌道較高,需要探測的距離較遠(400 km左右),對系統的發射功率和接收口徑有較高的要求。同時,星載激光雷達受平臺載荷的限制,對系統的體積、功耗、質量又有嚴格的約束,因此具有更高靈敏度的光子計數激光雷達逐漸成為其技術發展方向。而隨著對三維成像效率要求的提高,星載激光雷達系統逐漸從單點探測向著線陣推掃或面陣式成像發展,系統的橫向分辨率和測距精度不斷提高,系統的發展也越來越成熟。
3.1.2 機載成像激光雷達
機載掃描成像激光雷達主要應用于地形測繪、電力巡線、水下探測、遮蔽目標探測等領域。奧地利的Riegl、瑞士的Leica、加拿大的Optech和國內的海達數云、北科天匯等公司,已經有許多定型的商業化產品。以Riegl 公司為例,目前主要有VQ、LMS、VUX等系列的機載激光雷達,均使用反射式旋轉多面轉鏡作為掃描機構、角分辨率均可達到0.001°、測距精度小于25mm,VQ 與LMS系列具有60°的掃描角度、VUX 系列掃描角度可達330°,如圖6所示。
1995年Fibertek公司研制出了用于直升機防撞的激光雷達系統(HLR),如圖7所示,以兩個雙楔形硅棱鏡組成二維掃描器,可以探測到440m外直徑1cm的電線。
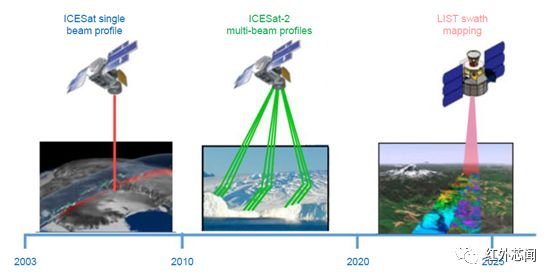
圖5 NASA對地觀測激光雷達發展路線圖

圖6 Riegl公司VQ、LMS、VUX系列機載激光雷達
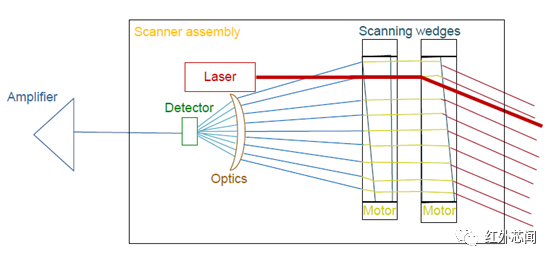
圖7 Fibertek公司研制的直升機防撞的激光雷達系統主要模塊示意圖
2003年MIT為了對隱藏在樹林下的坦克等目標成像,提出利用衍射光學元件將光束分成32×32的陣列,采用32×32 GM-APD作為探測器,并采用異向旋轉的雙光楔作為掃描部件,提高圖像分辨率;最終通過150m的飛行試驗驗證了系統具有5cm橫向分辨率和40cm的距離分辨率,能夠精確識別偽裝的目標。此外,2007年約翰霍普金斯大學應用物理實驗室也提出采用可調整的Optech ALTM3100商用激光雷達系統配以雙軸萬向節掃描裝置,使用步進凝視探測模式,識別測量樹木、叢林下的遮蔽目標,如圖8所示。
NASA在機載掃描成像激光雷達領域也取得了豐碩的成果,2001年“Microaltimeter”首次完成了掃描單光子雷達(single photon LiDAR,SPL)的空中演示。此后,在此基礎上研發了滿足低、中、高空探測的“Leafcutter”、HRQLS(highresolution quantum LiDAR system)、HAL(high altitude LiDAR)等機載成像激光雷達系統。
機載掃描成像激光雷達系統是目前應用最廣泛、發展最成熟的激光雷達系統,國內外的多家激光雷達公司都已經推出成熟的機載激光雷達系統,在城市地形測繪、電力巡線、水下探測等領域有著廣泛的應用。根據機載平臺的實際應用特點,目前機載激光雷達的最大測距范圍一般為3km~6km,測距精度為厘米級,為實現快速掃描,其激光發射重頻較高,可達百kHz量級,其探測體制也在從成熟的線性探測向光子計數方向發展。
3.1.3 車載成像激光雷達
車載成像激光雷達的主要應用方向即汽車自動駕駛,其對探測范圍的要求相對較低(200m~300m),但探測視場需要覆蓋水平360°和垂直方向±20°左右,且對橫向分辨率要求較高。近年來無人駕駛汽車發展迅速,掃描成像激光雷達作為無人駕駛一種有效的解決方案,吸引著世界各國都在積極開展車載激光雷達的研究。IBEO、Velodyne、SICK、Quanergy、Innoviz、AEye、禾賽科技、北科天繪等一大批國內外公司都積極投身這一領域。
Velodyne公司以360°水平周掃的多光束激光雷達為主要產品,掃描線數達到了16線、32線及64線,是機械旋轉+多線掃描成像的典型代表,技術較為成熟。Quanergy公司則以相控陣光學掃描作為主打方案,但在回波信號的接收上存在短板,技術有待成熟。值得一提的是,AEye公司以MEMS微鏡掃描結合攝像頭實現行人、騎行者、車輛及動物等關鍵性目標物實時提取,較為貼近自動駕駛的實際需求。目前車載激光雷達多采用成本較低的905nm激光二極管作為光源,但隨著1550nm激光器件的發展與成熟,車載激光雷達應更傾向于這一人眼安全的波段。
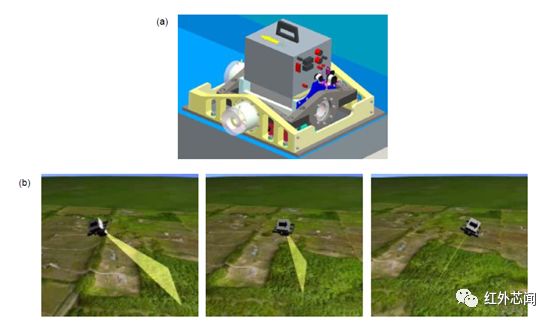
圖8 (a)約翰霍普金斯大學應用物理實驗室設計的雙軸萬向節掃描裝置;
(b)步進凝探測模式示意
值得注意的是,對于自動駕駛來說,如果由激光雷達自己先“漫無目的”做全景掃描,構建更高分辨率、更遠探測距離的三維點云圖像,再去與其他傳感器進行融合,這樣不僅效率低、成本高,且將產生大量“無效”數據,不利于決策系統的快速處理和響應。而將激光雷達與視覺感知技術深度融合,結合人工智能技術,首先對視覺傳感器“看”到的圖像進行語義分割、識別,然后充分發揮“精確測距”這一激光雷達的核心優勢,由其僅僅對分割后的圖像區域或者“興趣點”進行選擇性測距,可大大減少無效數據,提高系統的響應速度,應成為這一領域的技術發展方向。
車載激光雷達作為無人駕駛技術中重要的傳感器之一,對于保證無人駕駛汽車行車安全具有重要意義。隨著無人駕駛產業的進一步發展,車載激光雷達市場前景廣闊。為了滿足商業應用的需求,車載激光雷達系統實現小型化、低成本是未來的總體發展趨勢。無人駕駛汽車產業化的到來以及車載激光雷達成本的降低,將共同推動車載激光雷達產業的爆發式增長。
掃描成像激光雷達成像系統根據不同的平臺應用于不同的場合,采用直接探測的方式,不需要合作目標,具有探測距離遠、成像視場大的優點,在星載、機載、車載等領域有著不可替代的位置。總的來說,為了克服單點掃描成像激光雷達系統成像速度慢的缺點,掃描成像激光雷達逐漸從單點掃描向小面陣掃描和線陣推掃式成像過渡。而且,為了減小系統體積、重量、功耗,掃描成像激光雷達系統的探測器也逐漸由線性探測器向靈敏度更高的光子計數探測器過渡。
3.2 面陣式三維成像激光雷達
近年來,隨著探測器件的發展,基于面陣成像體制的三維成像激光雷達得到了快速發展。它不需要復雜的掃描機構,僅發射一次激光脈沖即可獲得一幀三維圖像,即所謂的“閃光式”成像,能夠極大地提高雷達系統三維成像的速度,特別適用于高速運動平臺或高動態目標三維成像等一些無法進行掃描成像的特殊場景。
目前,按照采用的光電探測器件,面陣三維成像激光雷達大致存在APD陣列和CCD相機兩種探測方式。其區別在于,APD陣列的每個像元都是一個單點探測的激光像元,能夠直接給出與其對應的距離信息,而CCD相機作為一種積分探測器件無法直接獲得距離信息,需要通過調制/解調來由所獲得圖像的灰度間接計算出每個像元對應的距離。
對于面陣式三維成像激光雷達,為了提高系統的探測效率,與面陣探測器件相對應的,其激光發射系統應設計為相對應的點陣式分光發射,目前一般多采用衍射光學器件(diffraction optical element,DOE)來進行激光的分束,隨著垂直腔面發射激光器(vertical cavity surface emitting laser,VCSEL)的快速發展,未來其將有望成為面陣式三維成像激光雷達的理想光源。
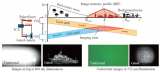
上世紀90年代后期,美國麻省理工學院林肯實驗室(MIT/LL)對基于蓋革模式工作的雪崩光電二極管焦平面陣列(GM-APD FPAs)進行了研究,并將其作為探測器應用于面陣式三維成像激光雷達。其探測陣列的規模日益增大,從4×4、8×8到128×32乃至256×256。2003年,MIT/LL研制的焦平面陣列三維成像激光雷進行了機載三維成像試驗,在150m的飛行高度獲得了5cm的橫向分辨率和40cm的距離分辨率。另外,該雷達還進行了地面目標成像試驗和機載植被穿透試驗,實驗結果表明,采用焦平面探測器的面陣式三維成像激光雷達具有快速獲取目標三維圖像的能力,能夠有效地探測被遮蔽的目標,實現對偽裝目標的精確識別(圖9)。
從MIT/LL的研究歷程來看,其重點都放在研制大面積APD上。受半導體工藝的限制,對于無法獲得大面陣APD的單位,大多采用了小面陣APD結合其他探測器或者掃描方法來獲得大視場以補償空間分辨率不足的問題。另外,這種焦平面陣列式三維成像激光雷達對APD陣列探測器及其配套的讀出電路要求很高,在陣列像元的規模日益擴大的情況下,受到像元間串擾和高速讀出電路帶寬的制約,因此,其三維成像的橫向和縱向分辨率均難以得到大幅度的提升。
這種情況下,研究人員開始探索利用CCD相機等大像元規模的探測器來實現激光三維成像的方法。丹麥國防研究機構在2004年提出了基于距離選通時間切片的激光三維成像方法,利用CCD相機在不同的選通距離范圍內成像,采用時間切片步進的方式獲取由近到遠不同距離上的圖像,然后再將這些不同距離上獲得圖像的灰度信息疊加重構出三維圖像。由其成像原理可知,它需要多幀圖像的疊加才能重構出一幀三維圖像,成像時間較慢。
2007年,法-德圣路易斯研究所提出了一種強度相關激光三維成像方法,利用ICCD相機獲取的兩幅強度調制圖像即可重建出一幅距離圖像,能夠大幅提高三維成像的速度。然而,這種方法必須要保證激光光源的線性度,同時還要求激光脈沖和選通脈沖寬度滿足2倍關系,實現起來較為困難。浙江大學于2008年提出了基于增益調制的激光三維成像方法,采用線性-恒定、線性-線性的增益調制進行距離信號的恢復,避免了對激光脈沖和選通脈沖形狀特殊需求的問題,利用脈沖激光主動照明和百萬像素的ICCD相機,對距離1km處的建筑物進行了三維成像實驗,其測距精度約為1m,成像結果如圖10所示。
在此基礎上,哈爾濱工業大學將線性增益調制改變為指數增益調制,采用532nm的脈沖激光照明和ICCD 相機,對距離1km處的建筑物進行三維成像試驗,其測距精度約為5m,實驗結果如圖11所示。
ICCD一般由微通道板、熒光屏、光纖錐和CCD四個器件級聯組成的,在其成像過程中,信號經過了“光-電-光-電”的多重轉換,必然引入了較多的噪聲,并且受限于微通道板本身的通道數以及熒光屏與CCD通過光纖錐的耦合過程,其成像的傳函較低,橫向分辨率有限。
2018年,中國科學院光電技術研究所提出了基于偏振調制的激光三維成像方法,利用高靈敏度、高分辨率的EMCCD相機作為探測器,其成像信號直接完成“光-電”一次轉換,省去了ICCD相機的“光-電-光-電”多重轉換過程,提高了系統的探測靈敏度和橫向分辨率。同時,利用偏振調制技術將時間信息轉換為圖像的灰度信息,從而實現距離的測量。該系統僅需發射一次脈沖即可獲得一幅三維圖像,具備閃光三維成像能力,其曝光時間達到亞微秒量級,能夠適應于高速運動平臺或高動態目標的三維成像需求。
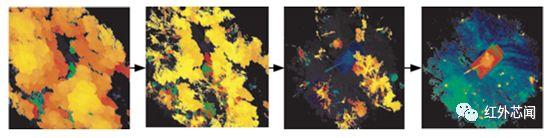
圖9 MIT閃光式三維成像激光雷達對密林中隱蔽坦克進行探測
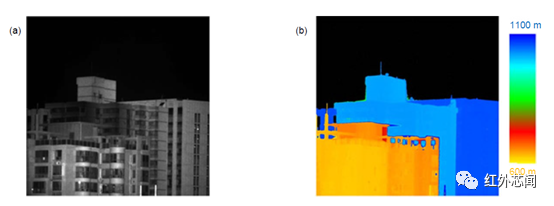
圖10 浙江大學面陣激光雷達三維成像。(a)強度圖;(b)距離圖
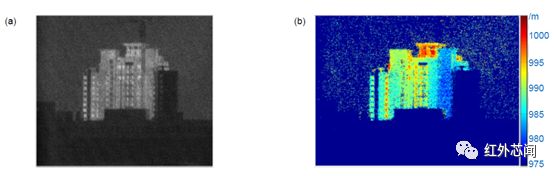
圖11 哈爾濱工業大學面陣激光雷達三維成像。(a)強度圖;(b)距離圖
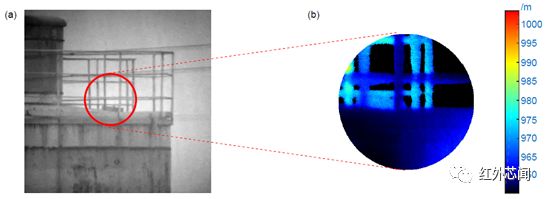
圖12 中國科學院光電技術研究所研制的激光雷達獲取的遠距離目標三維圖像。(a)灰度圖像;(b)距離圖像
需要指出的是,面陣式激光三維成像本質上是將掃描激光成像逐點式的距離信息串行獲取,改變為點陣式的距離信息并行獲取,雖然其成像速度快,不需要復雜的掃描機構,具備閃光三維成像的能力,但同時也就要求將系統接收的激光回波功率平均分布到每個探測像元上,在相同的激光發射總功率和接收口徑下,探測像元越多,分散到每個像元上的回波功率就越小,因此面陣成像系統的探測距離遠遠小于單點探測系統,一般僅適用于較近距離的成像探測。
4 結束語
三維成像激光雷達系統與傳統的被動相機成像相比不僅能夠捕獲被測目標的強度像還能提供目標的距離圖像,能夠獲取更為豐富的目標信息,且不受光照條件限制;與微波雷達成像系統相比,激光成像系統具有更高的距離和角度分辨率,以及更小的體積、重量和功耗。三維成像激光雷達日益成為現代成像領域不可或缺的重要組成部分,隨著激光器與探測器等元器件的不斷發展,激光雷達系統的發展也日新月異,其應用領域也不斷擴展。
三維成像激光雷達逐漸從單點掃描向小面陣掃描和線陣推掃式及面陣閃光成像發展,成像速度越來越快;同時單光子探測技術逐漸成熟,探測靈敏度越來越高,也使得激光雷達系統的體積、重量、功率進一步減小。本文對三維成像激光雷達進行了綜述,詳細闡述了國內外的發展現狀及不同體制的工作原理,總結了不同體制成像激光雷達系統的優缺點,希望能夠為讀者了解現代成像激光雷達系統的發展及進行激光雷達系統的設計提供借鑒。
另外,也要認識到三維成像激光雷達作為一種探測手段也有其不足之處,例如相比于被動相機成像,其橫向分辨率不高,缺乏目標的紋理信息,相比于微波雷達,其更易受到云、霧、霾等大氣條件的限制。現代探測技術的發展越來越趨向于多種傳感器的融合探測從而獲取更豐富的目標信息,三維成像的發展也趨向于主、被動成像相結合。
在激光雷達系統的設計和應用中應充分考慮實際需要,盡量避免“以己之短,克敵之長”的情況,而是發揮它的優勢,與可見/紅外相機等被動成像相結合,充分利用他們面陣成像、大視場的優點,在興趣點/控制點上進行快速、精確測距,從而做到“點面結合,各善所長”。
審核編輯 :李倩
-
測試測量
+關注
關注
25文章
892瀏覽量
90626 -
激光雷達
+關注
關注
968文章
3981瀏覽量
190009 -
三維成像
+關注
關注
0文章
35瀏覽量
11108
原文標題:一文看懂激光雷達探測及三維成像
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用單光子探測技術設計的數字混沌激光雷達系統

激光雷達的工作原理和分類
激光雷達技術的基于深度學習的進步
LIDAR激光雷達逆向建模能用到revit當中嗎
光學雷達和激光雷達的區別是什么
一文看懂激光雷達

愛普生IMU產品在激光雷達測繪中的應用

激光距離選通三維成像技術研究進展綜述

黑科技來襲!激光雷達在線監測裝置,讓輸電線路運維無憂
歐洲汽車巨頭Stellantis投資FMCW激光雷達開發商SteerLight
激光雷達的探測技術介紹 機載激光雷達發展歷程

華為詳細解讀激光雷達
激光雷達LIDAR基本工作原理

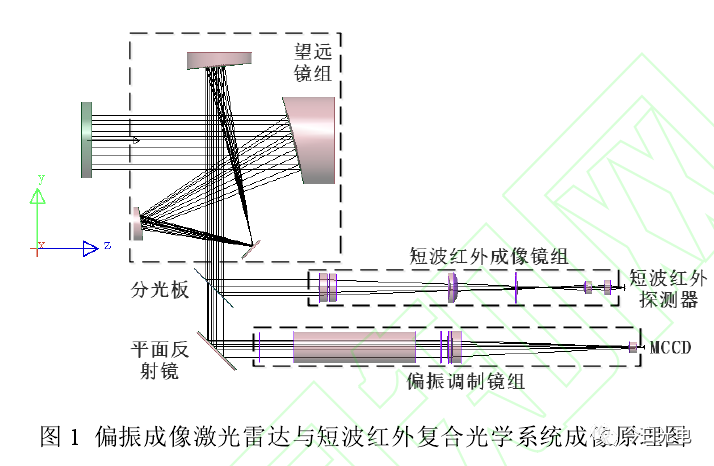
偏振成像激光雷達與短波紅外復合光學接收系統設計與分析介紹





 工商網監
工商網監
評論