") ABB機(jī)器人示教器入門-初級(jí)教學(xué)
ABB機(jī)器人示教器入門-初級(jí)教學(xué)
手動(dòng)操作窗口示意圖: 步驟1、將機(jī)器人操作模式選擇器置于手動(dòng)限速模式。步驟2、在ABB菜單中,單擊手動(dòng)操縱打開手動(dòng)操縱窗口。
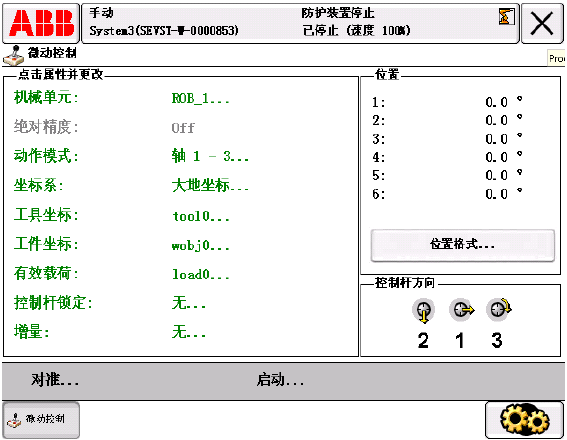 ?機(jī)械單元:步驟1、打開手動(dòng)操縱窗口,并點(diǎn)擊機(jī)械單元。步驟2、在彈出的窗口中選擇需要進(jìn)行控制的機(jī)械單元,然后點(diǎn)擊確定。
?機(jī)械單元:步驟1、打開手動(dòng)操縱窗口,并點(diǎn)擊機(jī)械單元。步驟2、在彈出的窗口中選擇需要進(jìn)行控制的機(jī)械單元,然后點(diǎn)擊確定。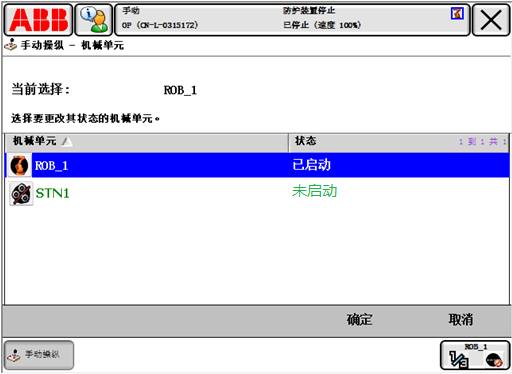 ?運(yùn)動(dòng)模式:步驟1、打開手動(dòng)操縱窗口,并點(diǎn)擊動(dòng)作模式。步驟2、在彈出的窗口中選擇所需模式,然后點(diǎn)擊確定。
?運(yùn)動(dòng)模式:步驟1、打開手動(dòng)操縱窗口,并點(diǎn)擊動(dòng)作模式。步驟2、在彈出的窗口中選擇所需模式,然后點(diǎn)擊確定。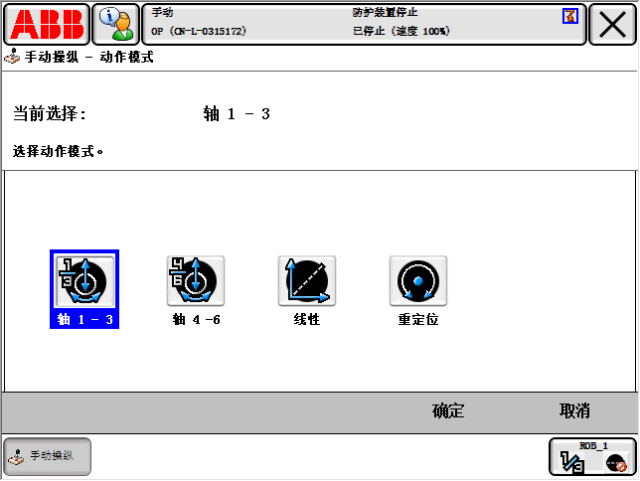 ?單軸運(yùn)動(dòng)Axis 1-3 軸 1-3
?單軸運(yùn)動(dòng)Axis 1-3 軸 1-3 機(jī)器人一、二、三每個(gè)轉(zhuǎn)軸單獨(dú)轉(zhuǎn)動(dòng)。
機(jī)器人一、二、三每個(gè)轉(zhuǎn)軸單獨(dú)轉(zhuǎn)動(dòng)。 Axis 4-6 軸 4-6
Axis 4-6 軸 4-6 機(jī)器人四、五、六每個(gè)轉(zhuǎn)軸單獨(dú)轉(zhuǎn)動(dòng)。
機(jī)器人四、五、六每個(gè)轉(zhuǎn)軸單獨(dú)轉(zhuǎn)動(dòng)。 單軸運(yùn)動(dòng)何時(shí)使用比較好呢?(1)將機(jī)械單元移出危險(xiǎn)位置;(2)將機(jī)器人移出奇點(diǎn);(3)定位機(jī)器人軸,以便進(jìn)行校準(zhǔn)。注:機(jī)器人外軸運(yùn)動(dòng)必須為單軸運(yùn)動(dòng);為了更精確校準(zhǔn),可使用微動(dòng)控制。
重定位運(yùn)動(dòng)姿態(tài)運(yùn)動(dòng):機(jī)器人TCP位置不變,機(jī)器人工具沿坐標(biāo)軸轉(zhuǎn)動(dòng),改變姿態(tài)。
單軸運(yùn)動(dòng)何時(shí)使用比較好呢?(1)將機(jī)械單元移出危險(xiǎn)位置;(2)將機(jī)器人移出奇點(diǎn);(3)定位機(jī)器人軸,以便進(jìn)行校準(zhǔn)。注:機(jī)器人外軸運(yùn)動(dòng)必須為單軸運(yùn)動(dòng);為了更精確校準(zhǔn),可使用微動(dòng)控制。
重定位運(yùn)動(dòng)姿態(tài)運(yùn)動(dòng):機(jī)器人TCP位置不變,機(jī)器人工具沿坐標(biāo)軸轉(zhuǎn)動(dòng),改變姿態(tài)。
 注:重定位運(yùn)動(dòng)時(shí),必須先選擇工具坐標(biāo)。
線性運(yùn)動(dòng)基坐標(biāo)何時(shí)使用:當(dāng)需要將可預(yù)測(cè)的運(yùn)動(dòng)輕而易舉地轉(zhuǎn)化為控制桿運(yùn)動(dòng)時(shí),可以在基坐標(biāo)系中進(jìn)行微動(dòng)控制。在許多情況下,基坐標(biāo)系是使用最為方便的一種坐標(biāo)系,因?yàn)樗鼘?duì)工具、工件或其它機(jī)械單元沒有依賴性。
注:重定位運(yùn)動(dòng)時(shí),必須先選擇工具坐標(biāo)。
線性運(yùn)動(dòng)基坐標(biāo)何時(shí)使用:當(dāng)需要將可預(yù)測(cè)的運(yùn)動(dòng)輕而易舉地轉(zhuǎn)化為控制桿運(yùn)動(dòng)時(shí),可以在基坐標(biāo)系中進(jìn)行微動(dòng)控制。在許多情況下,基坐標(biāo)系是使用最為方便的一種坐標(biāo)系,因?yàn)樗鼘?duì)工具、工件或其它機(jī)械單元沒有依賴性。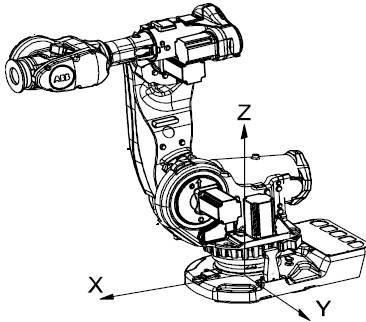 操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性;(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟;(3)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊基坐標(biāo),再點(diǎn)擊確定;(4)按住使動(dòng)裝置,啟動(dòng)操縱器電機(jī);(5)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng);
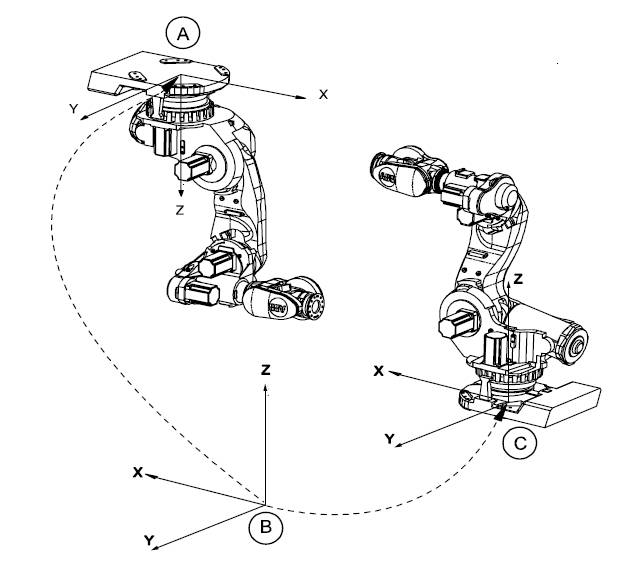
線性運(yùn)動(dòng)大地坐標(biāo)何時(shí)使用:例如:有兩個(gè)機(jī)器人,一個(gè)安裝于地面,一個(gè)倒置。代表機(jī)器人的基坐標(biāo)系也將上下顛倒。如果在倒置機(jī)器人的基坐標(biāo)系中進(jìn)行微動(dòng)控制,則很難預(yù)測(cè)移動(dòng)情況。此時(shí)可選擇共享大地坐標(biāo)系。
操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性;(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟;(3)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊基坐標(biāo),再點(diǎn)擊確定;(4)按住使動(dòng)裝置,啟動(dòng)操縱器電機(jī);(5)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng);
線性運(yùn)動(dòng)大地坐標(biāo)何時(shí)使用:例如:有兩個(gè)機(jī)器人,一個(gè)安裝于地面,一個(gè)倒置。代表機(jī)器人的基坐標(biāo)系也將上下顛倒。如果在倒置機(jī)器人的基坐標(biāo)系中進(jìn)行微動(dòng)控制,則很難預(yù)測(cè)移動(dòng)情況。此時(shí)可選擇共享大地坐標(biāo)系。
 操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性。(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟。(3)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊基坐標(biāo),再點(diǎn)擊確定。(4)按住使動(dòng)裝置,啟動(dòng)操縱器電機(jī)。(5)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng)。
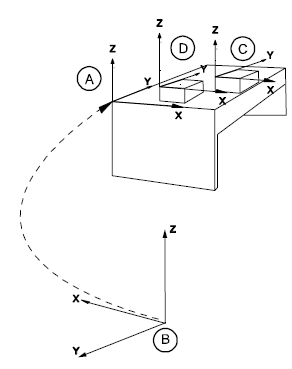
線性運(yùn)動(dòng)工件坐標(biāo)何時(shí)使用:例如:工廠打算確定一系列孔的位置,以便沿著工件邊緣鉆孔。工廠打算在工件箱的兩面隔板之間焊接。
操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性。(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟。(3)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊基坐標(biāo),再點(diǎn)擊確定。(4)按住使動(dòng)裝置,啟動(dòng)操縱器電機(jī)。(5)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng)。
線性運(yùn)動(dòng)工件坐標(biāo)何時(shí)使用:例如:工廠打算確定一系列孔的位置,以便沿著工件邊緣鉆孔。工廠打算在工件箱的兩面隔板之間焊接。
 操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性。(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟。(3)點(diǎn)擊工件以選擇工件。(4)點(diǎn)擊工具以選擇工具。(5)點(diǎn)擊有效載荷以選擇有效載荷(6)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊工件,再點(diǎn)擊確定。(7)按住使動(dòng)裝置,啟動(dòng)操縱器電機(jī)。(8)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng)。
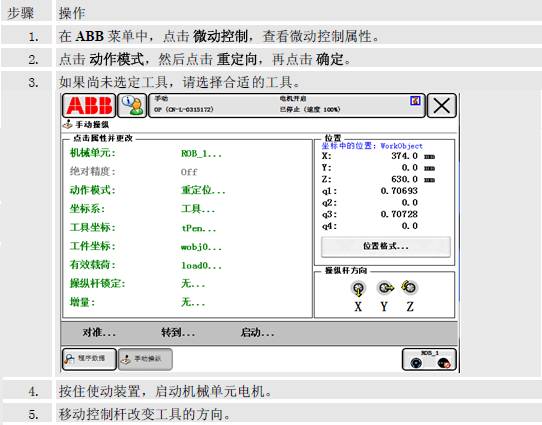
線性運(yùn)動(dòng)工具坐標(biāo)何時(shí)使用:使用工具體系對(duì)穿、鉆、銑、鋸等進(jìn)行編程和調(diào)整
操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性。(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟。(3)點(diǎn)擊工件以選擇工件。(4)點(diǎn)擊工具以選擇工具。(5)點(diǎn)擊有效載荷以選擇有效載荷(6)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊工件,再點(diǎn)擊確定。(7)按住使動(dòng)裝置,啟動(dòng)操縱器電機(jī)。(8)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng)。
線性運(yùn)動(dòng)工具坐標(biāo)何時(shí)使用:使用工具體系對(duì)穿、鉆、銑、鋸等進(jìn)行編程和調(diào)整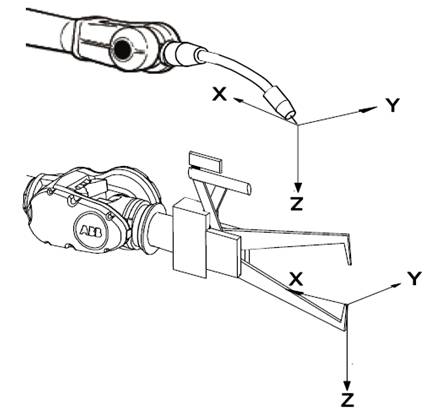 操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性。(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟。(3)選擇合適的工具。(4)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊工具,再點(diǎn)擊確定。(5)按住使動(dòng)裝置,啟動(dòng)機(jī)械單元電機(jī)。(6)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng)。
操作步驟(1)在ABB菜單中,點(diǎn)擊微動(dòng)控制,查看微動(dòng)控制屬性。(2)點(diǎn)擊動(dòng)作模式,然后點(diǎn)擊線性,再點(diǎn)擊確定,如果之前已選擇線性動(dòng)作,則無需執(zhí)行此步驟。(3)選擇合適的工具。(4)點(diǎn)擊坐標(biāo)系,然后點(diǎn)擊工具,再點(diǎn)擊確定。(5)按住使動(dòng)裝置,啟動(dòng)機(jī)械單元電機(jī)。(6)移動(dòng)控制桿,機(jī)械單元將隨之移動(dòng)。審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
207972 -
ABB
+關(guān)注
關(guān)注
26文章
527瀏覽量
52869
原文標(biāo)題:ABB機(jī)器人示教器入門-初級(jí)教學(xué)|干貨
文章出處:【微信號(hào):AMTBBS,微信公眾號(hào):世界先進(jìn)制造技術(shù)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能拖動(dòng)示教噴涂機(jī)器人:技術(shù)革新與未來展望
? ? ? 智能拖動(dòng)示教噴涂機(jī)器人是近年來工業(yè)自動(dòng)化領(lǐng)域的一項(xiàng)重要?jiǎng)?chuàng)新,它的出現(xiàn)不僅極大地提升了噴涂作業(yè)的效率和質(zhì)量,還為傳統(tǒng)制造業(yè)的轉(zhuǎn)型升級(jí)提供了有力支持。本文將從智能拖動(dòng)示


什么是拖動(dòng)示教?機(jī)器人拖動(dòng)示教方式分析
隨著拖動(dòng)示教在協(xié)作機(jī)器人、并聯(lián)機(jī)器人上的應(yīng)用,將調(diào)試技術(shù)趨向快速、簡便的方向發(fā)展,滿足生產(chǎn)企業(yè)應(yīng)用機(jī)器人進(jìn)行及時(shí)、高效的生產(chǎn)需求,以及在工業(yè)

協(xié)作機(jī)器人拽拖示教詳解
。DMC600M拖動(dòng)示教控制系統(tǒng)? ? ??拖動(dòng)示教通常使用以下步驟:? ? ??示教模式切換:
基于導(dǎo)納控制的機(jī)器人拖動(dòng)示教原理和實(shí)現(xiàn)步驟
(Admittance)模型描述。導(dǎo)納模型類似于彈簧和阻尼器的組合,用來描述機(jī)器人對(duì)外部力和運(yùn)動(dòng)的響應(yīng)。機(jī)器人拖動(dòng)示教系統(tǒng)DMC600M?
焊接機(jī)器人示教模式怎么設(shè)置
在現(xiàn)代制造業(yè)中,焊接機(jī)器人廣泛應(yīng)用于提高生產(chǎn)效率和焊接質(zhì)量。而焊接機(jī)器人示教模式的正確設(shè)置,是確保自動(dòng)化焊接過程精確執(zhí)行的重要環(huán)節(jié)。今天創(chuàng)想智控焊縫跟蹤系統(tǒng)小編帶大家了解焊接

工業(yè)機(jī)器人示教器按鈕功能介紹
工業(yè)機(jī)器人示教器是一個(gè)關(guān)鍵的人機(jī)交互設(shè)備,通過它操作者可以操作工業(yè)機(jī)器人運(yùn)動(dòng)、完成示
abb機(jī)器人系統(tǒng)密鑰在哪
ABB機(jī)器人系統(tǒng)密鑰是ABB機(jī)器人系統(tǒng)中用于保護(hù)其知識(shí)產(chǎn)權(quán)和確保系統(tǒng)安全性的一種技術(shù)手段。本文將詳細(xì)介紹ABB
abb機(jī)器人系統(tǒng)如何添加選項(xiàng)
ABB機(jī)器人系統(tǒng)是一種廣泛應(yīng)用于工業(yè)生產(chǎn)領(lǐng)域的自動(dòng)化設(shè)備。在實(shí)際應(yīng)用中,用戶可能需要對(duì)機(jī)器人系統(tǒng)進(jìn)行一些配置和設(shè)置,以滿足特定的生產(chǎn)需求。本文將詳細(xì)介紹如何在ABB
工業(yè)機(jī)器人abb左邊布局沒了怎么辦
在工業(yè)機(jī)器人領(lǐng)域,ABB(Asea Brown Boveri)是全球領(lǐng)先的制造商之一,其產(chǎn)品廣泛應(yīng)用于汽車、電子、食品和飲料等行業(yè)。ABB機(jī)器人的左邊布局通常指的是
abb機(jī)器人home點(diǎn)設(shè)置方法
ABB機(jī)器人的home點(diǎn)設(shè)置是機(jī)器人編程和操作中非常重要的一環(huán),它關(guān)系到機(jī)器人的精度和穩(wěn)定性。本文將詳細(xì)介紹ABB
abb機(jī)器人movej和movel的區(qū)別
ABB機(jī)器人是一種廣泛應(yīng)用于工業(yè)自動(dòng)化領(lǐng)域的智能設(shè)備,具有高度的靈活性和可靠性。在ABB機(jī)器人的編程和操作中,movej和movel是兩種常用的運(yùn)動(dòng)指令。本文將詳細(xì)介紹movej和mo
abb機(jī)器人的基本配置包括哪些
介紹: 機(jī)器人本體 機(jī)器人本體是ABB機(jī)器人的核心部分,包括機(jī)器人的機(jī)械結(jié)構(gòu)、關(guān)節(jié)、驅(qū)動(dòng)器等。
abb工業(yè)機(jī)器人的編程語言是什么
ABB工業(yè)機(jī)器人的編程語言主要是RAPID(Robot Application Programming Interface for Development),它是一種高級(jí)編程語言,專門為工業(yè)機(jī)器人





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論