 Azure Kinect Senser DK套件簡介
Azure Kinect Senser DK套件簡介
Azure Kinect Senser DK套件是微軟2020年最新推出的AI傳感器。Azure Kinect DK 是一款開發人員套件和 PC 外部設備,它搭載 100 萬像素高級深度攝像頭、360? 麥克風陣列,1200萬像素全高清攝像頭和方向傳感器,適用于先進的計算機視覺和語音模型開發。它的長度不到13厘米,厚度僅為4厘米。
系統要求:采用第7代 IntelCoreTMi3 處理器(雙核 2.4GHz 包含 HD620 GPU 或更快)的 Windows 10計算機、USB 3.0 端口、4GB 內存。不支持 Windows 10 S 模式。人體跟蹤等其他功能可能需要更高級的 PC 硬件。如需了解更多信息或查找技術規格,請訪問aka.ms/kinectdocs。
<傳感器購買>
微軟Azure Kinect DK-Microsoft Kinect for Azure傳感器-微軟官方商城 (microsoftstore.com.cn)
<硬件性能>
深度相機支持的工作模式
Azure Kinect DK 集成了 Microsoft 設計的 1 兆像素時差測距 (ToF) 深度相機,該相機使用符合 ISSCC 2018 的圖像傳感器。深度相機支持如下所述的模式:
| NFOV 非裝箱 | 640x576 | 75°x65° | 0、5、15、30 | 0.5 - 3.86 米 | 12.8 毫秒 |
| NFOV 2x2 裝箱 (SW) | 320x288 | 75°x65° | 0、5、15、30 | 0.5 - 5.46 米 | 12.8 毫秒 |
| WFOV 2x2 裝箱 | 512x512 | 120°x120° | 0、5、15、30 | 0.25 - 2.88 米 | 12.8 毫秒 |
| WFOV 非裝箱 | 1024x1024 | 120°x120° | 0、5、15 | 0.25 - 2.21 米 | 20.3 毫秒 |
| 被動 IR | 1024x1024 | 空值 | 0、5、15、30 | 空值 | 1.6 毫秒 |
| 模式 | 分辨率 | FoI | FPS | 工作范圍* | 曝光時間 |
* 850nm 時 15% 到 95% 的反射率,2.2 μW/cm2/nm,隨機誤差標準偏差 ≤ 17 mm,典型系統誤差 < 11 mm + 0.1% 的距離(無多路徑干擾)。可以在上面指示的操作范圍之外提供深度。這取決于對象的反射率。
彩色相機支持的工作模式
AzureKinect DK 包含 OV12A10 12MP CMOS 滾動快門傳感器。下面列出了本機工作模式:
| 3840x2160 | 16:9 | MJPEG | 0、5、15、30 | 90°x59° |
| 2560x1440 | 16:9 | MJPEG | 0、5、15、30 | 90°x59° |
| 1920x1080 | 16:9 | MJPEG | 0、5、15、30 | 90°x59° |
| 1280x720 | 16:9 | MJPEG/YUY2/NV12 | 0、5、15、30 | 90°x59° |
| 4096x3072 | 4:3 | MJPEG | 0、5、15 | 90°x74.3° |
| 2048x1536 | 4:3 | MJPEG | 0、5、15、30 | 90°x74.3° |
| RGB相機分辨率 (HxV) | 縱橫比 | 格式選項 | 幀速率 (FPS) | 額定 FOV (HxV)(處理后) |
RGB 相機與 USB 視頻類兼容,可以在未安裝傳感器 SDK 的情況下使用。(NI VAS一樣可以采集)
運動傳感器 (IMU)
嵌入式慣性測量單元 (IMU)為 LSM6DSMUS,包含加速度傳感器和陀螺儀。加速度傳感器和陀螺儀同時按 1.6 kHz 采樣。樣本以 208 Hz 的頻率報告給主機。
麥克風陣列
AzureKinect DK 中嵌入了被視為標準 USB 音頻類 2.0 設備的優質七麥克風環形陣列。可以訪問所有 7 個通道。性能規格:
靈敏度:-22 dBFS(94 dB SPL,1kHz)
信噪比 > 65 dB
聲學過載點:116 dB
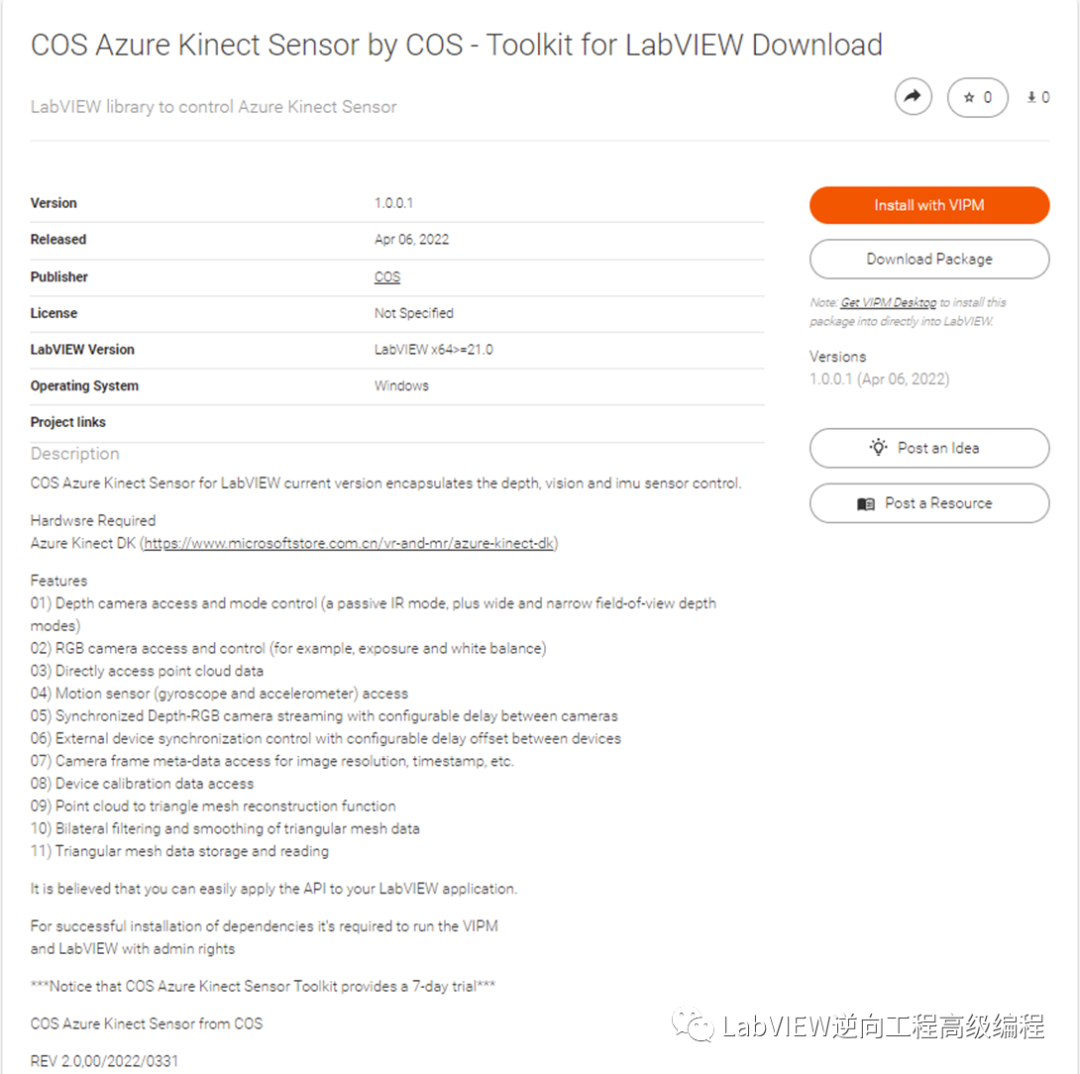
COS Azure Kinect Sensor簡介
COS AzureKinect Sensor 是對微軟SDK重新封裝,提供了更簡單的訪問方式并對功能進行升級。LabVIEW開發者不需要具體了解內部復雜的控制流程,使用工具包快速上手。
COS Azure Kinect Sensor功能
包含以上Azur Kinect Sensor DK提到功能外,還提供了如下擴展功能:
RBG-D圖像采集(深度圖像與RGB圖像對齊,深度圖像的分辨率與彩色圖像的分辨率相同)
RDB-D點云采集 (深度圖像與RGB圖像對齊,并變換為點云)
實時點云三角網格重建
三角網格的雙邊濾波平滑
三角網格渲染
三角網格存儲與讀取
< COS Azure KinectSensor工具包安裝>
NI官網下載(COSAzure Kinect Sensor Toolkit for LabVIEW - Download - VIPM by JKI)cos_lib_cos_azure_kinect_sensor-1.0.0.1.vip工具包,使用VIPM(LabVIEW安裝時自動安裝的工具)進行安裝。注意:LabVIEW與VIPM要以管理員權限運行。該工具包不依賴第三方軟件,安裝完后不需要進行任何配置,通過LabVIEW就可以直接運行了。
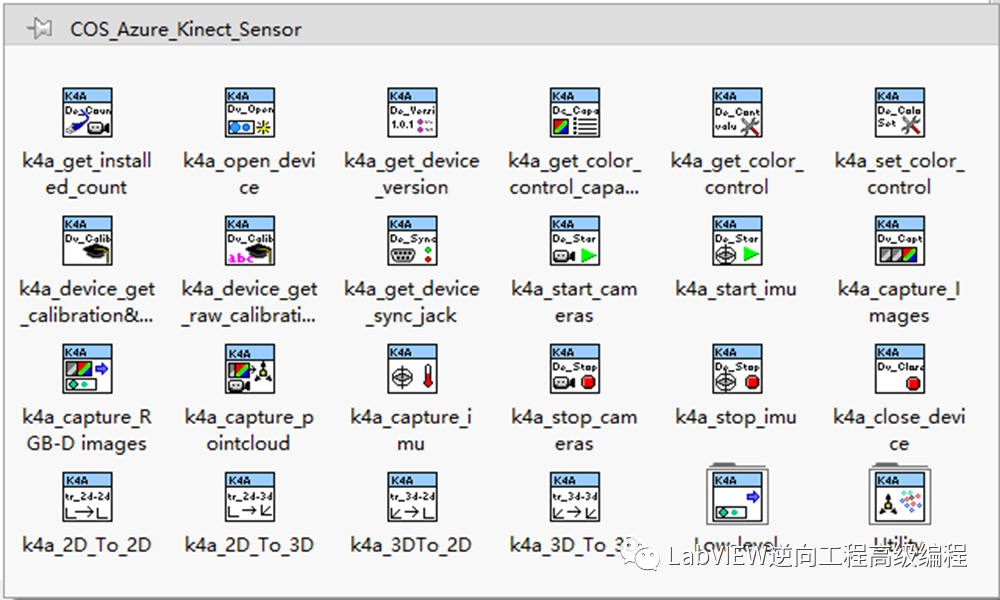
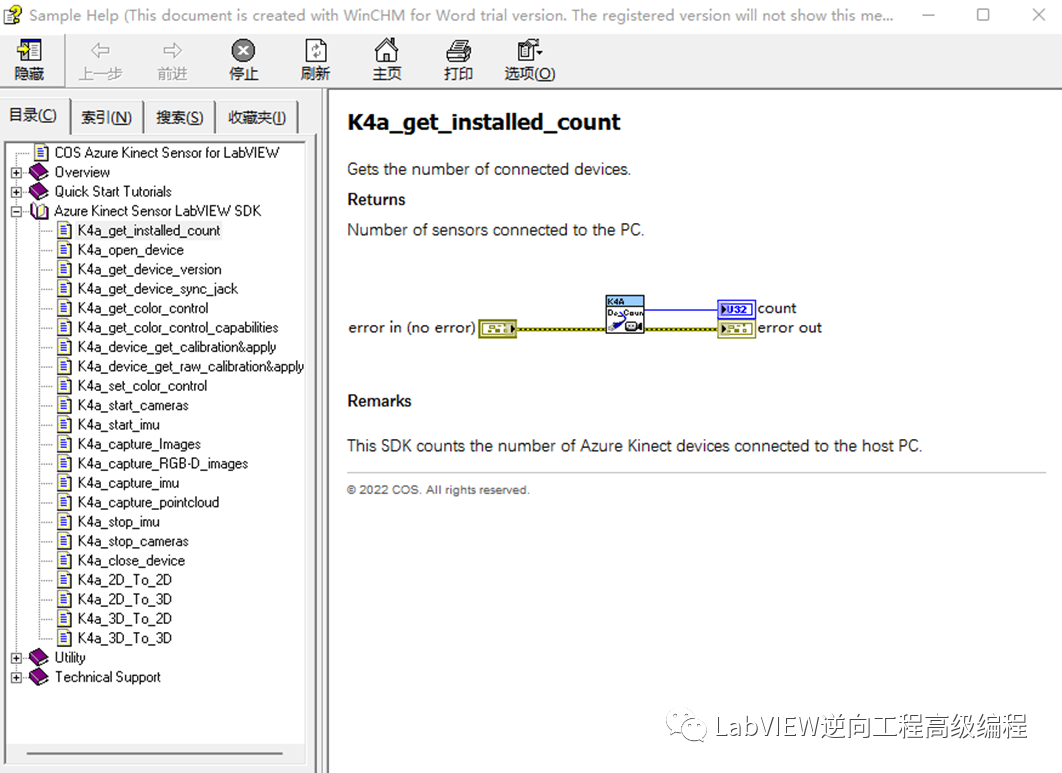
工具包安裝完成后,自動插入函數選版,右擊每個函數可以快速導航每個VI的詳細幫助。
2)通過Find Example快速查找例程
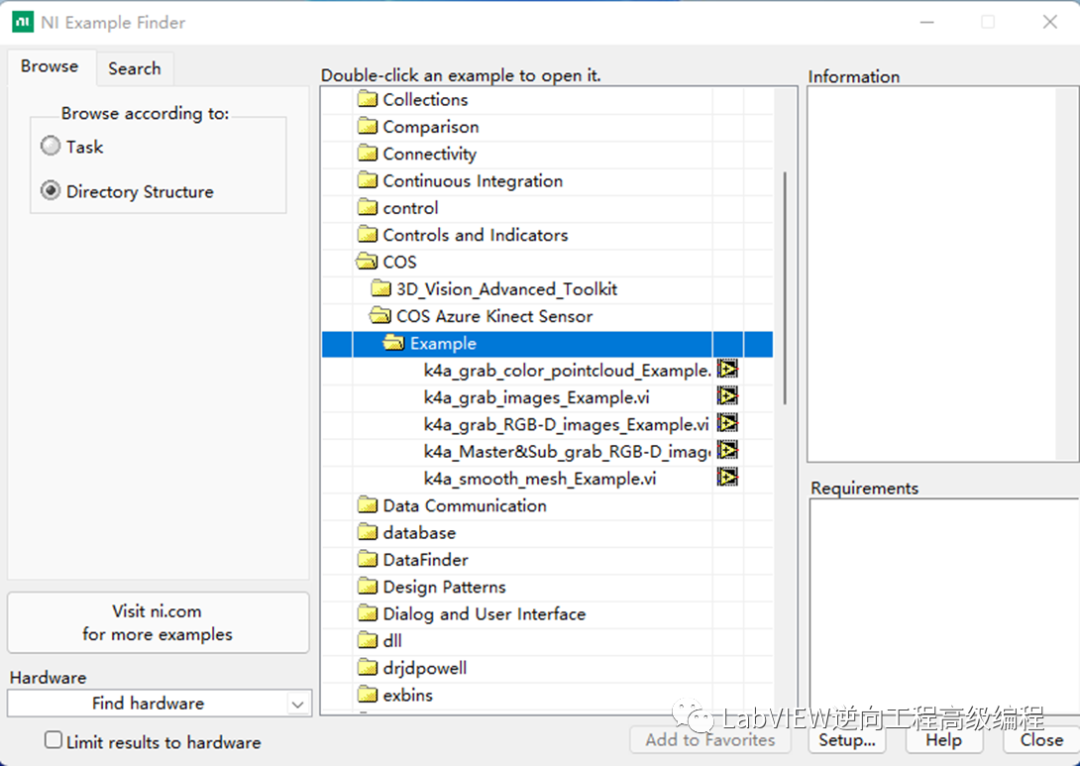
提供了采集圖像、采集RGB-D圖形、采用主從模式多相機同步采集、采集點云、三角網格平滑例程,相信大家通過例程快速掌握并應用于自己的項目中。
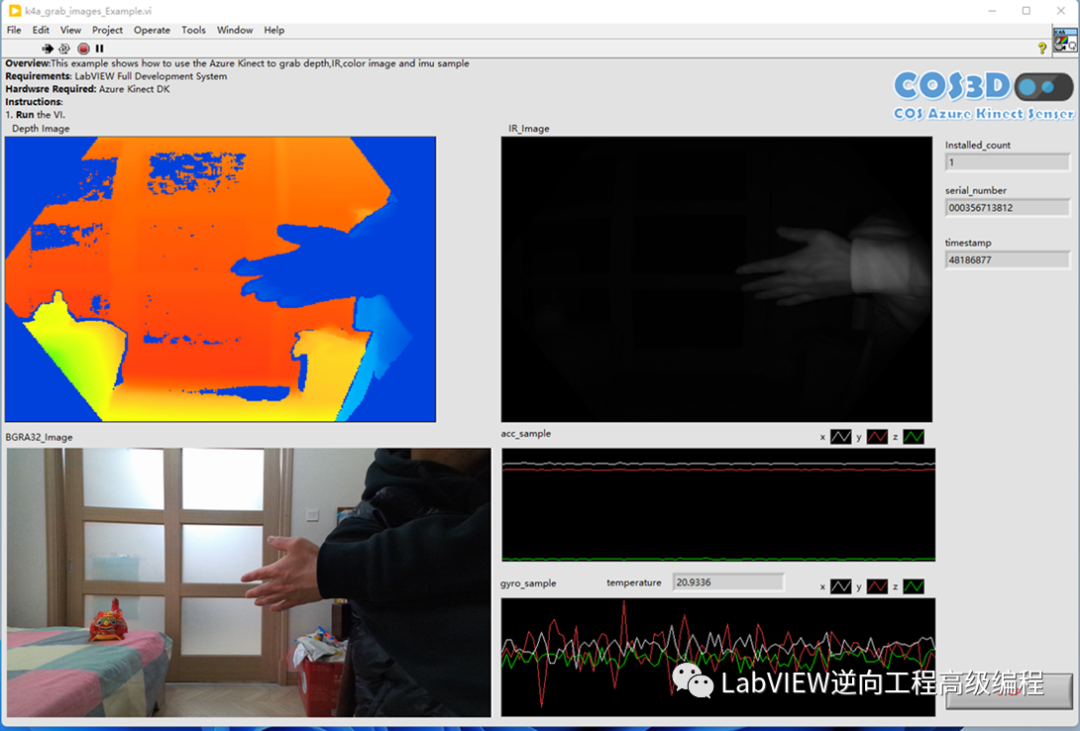
該例程介紹了如何使用設備進行圖像采集,k4a_capature_images.vi提供了設備內部同步采集彩色圖像、深度圖像及紅外圖像的功能,并介紹了IMU如何采集。

該例程介紹了如何采集RGB-D圖像。K4a_capture_RGB-D images.vi 提供了RGB-D圖像采集功能,將復雜的深度圖像與彩色圖像的對齊進行封裝,返回已經對齊后的深度圖像和彩色圖像。
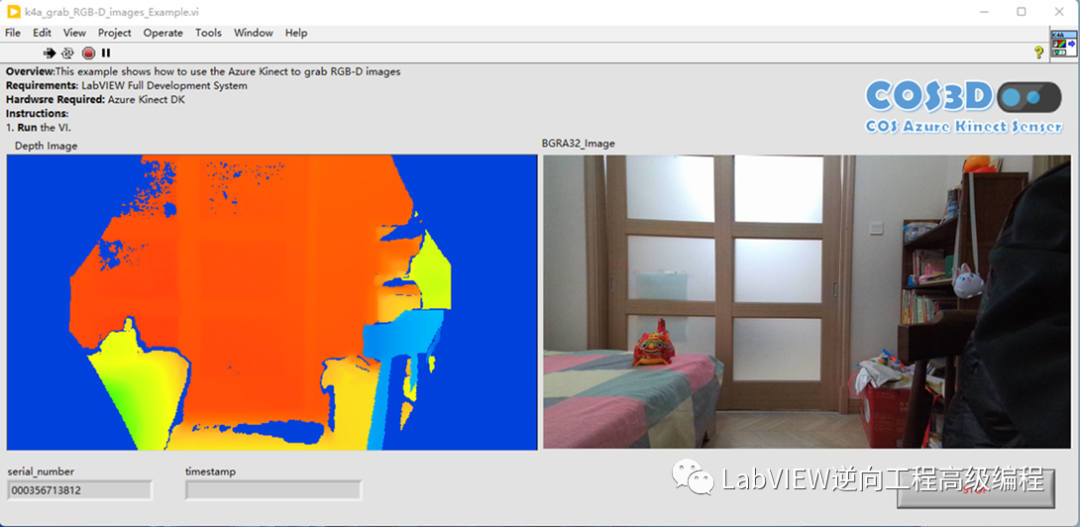
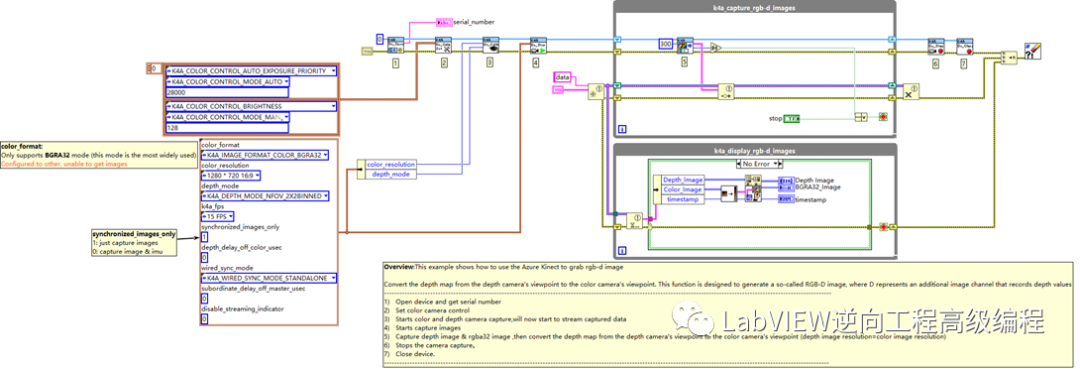
&sub_grab_rgb-d_images_example>
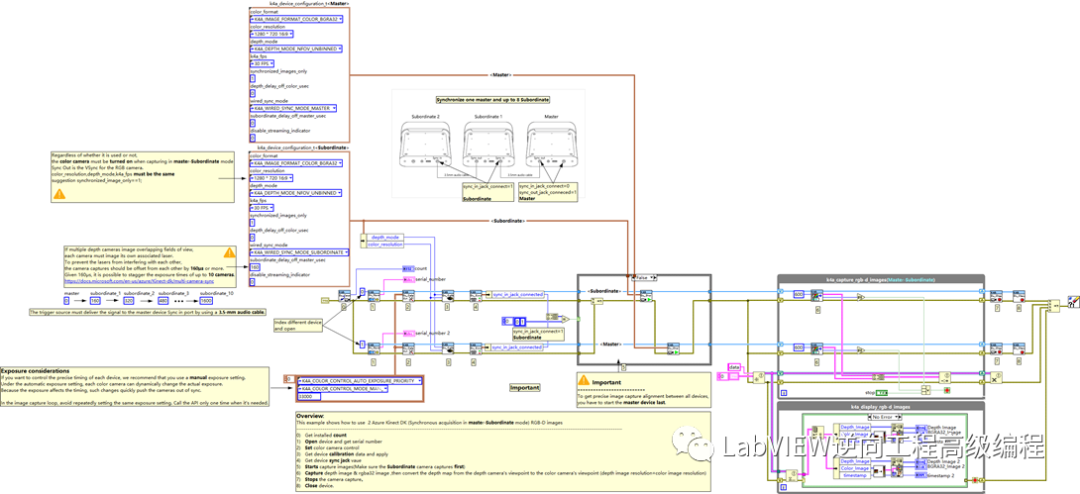
該例程介紹了如何采用主從模式多相機同步采集及注意事項。
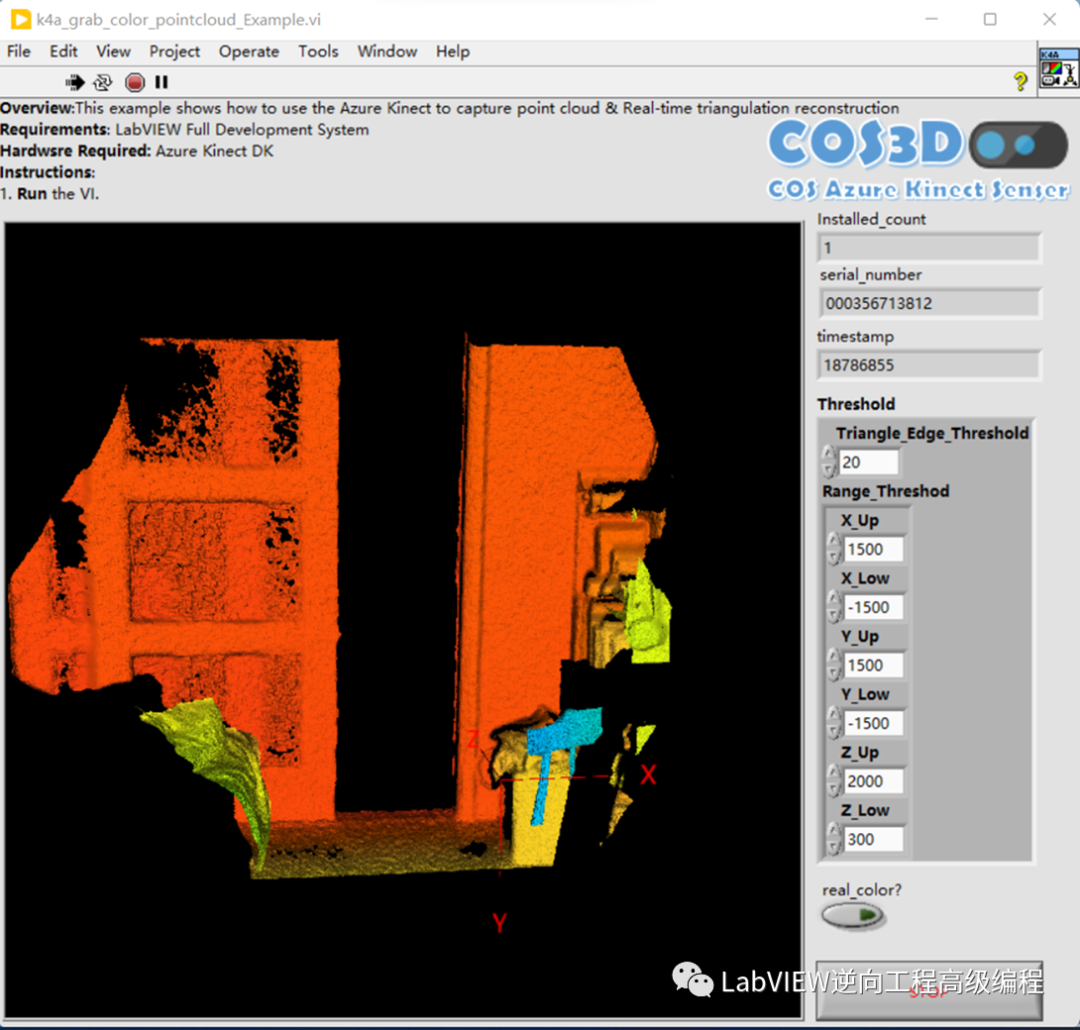
該例程介紹了如何進行彩色點云的采集。K4a_capture_pointcloud.vi,提供了直接采集點云的功能,將深度圖像與彩色相機對齊,并變換為點云的復雜算法進行封裝。
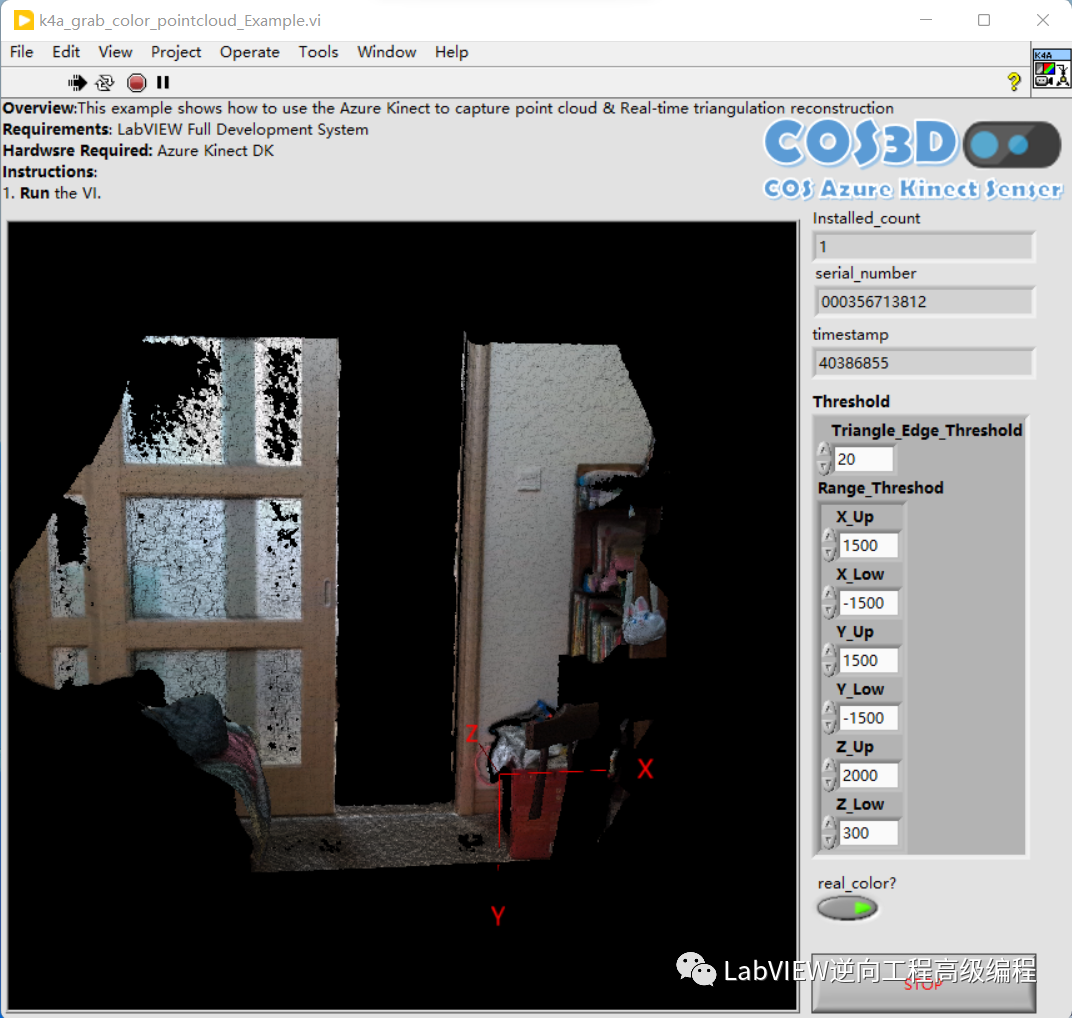
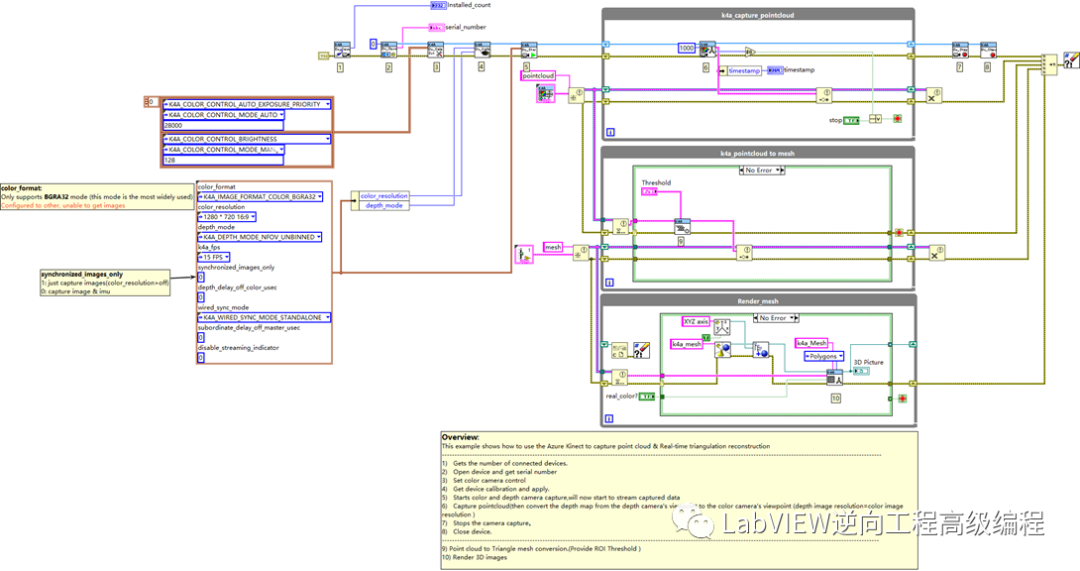
歡迎大家下載測試!
有任何問題歡迎交流:
原文標題:COS Azure Kinect Sensor For LabVIEW
文章出處:【微信公眾號:LabVIEW逆向工程高級編程】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753072 -
Kinect
+關注
關注
1文章
44瀏覽量
21753 -
套件
+關注
關注
0文章
21瀏覽量
20413 -
Azure
+關注
關注
1文章
123瀏覽量
12778
原文標題:COS Azure Kinect Sensor For LabVIEW
文章出處:【微信號:gh_63f7cd07072a,微信公眾號:LabVIEW逆向工程高級編程】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
微軟宣布Azure IoT Edge開源
微軟Kinect“壽終正寢”?不,Azure AI讓其“浴火重生”!
微軟推出全新傳感器,Project Kinect for Azure
第四代Kinect能否讓微軟Kinect“重生”?

Azure Percept DK的硬件介紹與設置使用
Azure Kinect Body Tracking For LabVIEW更新預覽
融合Azure Kinect技術,奧比中光Femto Mega接入Mac生態






 工商網監
工商網監
評論