") NVIDIA Jetson Xavier NX開(kāi)發(fā)者套件的應(yīng)用
NVIDIA Jetson Xavier NX開(kāi)發(fā)者套件的應(yīng)用
NVIDIA 發(fā)布了基于Jetson Xavier NX模塊的NVIDIA Jetson Xavier NX 開(kāi)發(fā)者套件。Jetson Xavier NX 以緊湊的外形尺寸提供高達(dá) 21 TOPS 的計(jì)算,功率低于 15W,為邊緣 AI 設(shè)備和自主機(jī)器帶來(lái)服務(wù)器級(jí)性能和云原生工作流。
借助 Jetson Xavier NX 開(kāi)發(fā)人員套件,您可以創(chuàng)建令人驚嘆的人工智能應(yīng)用程序,并將深度神經(jīng)網(wǎng)絡(luò) (DNN) 模型和流行的機(jī)器學(xué)習(xí)框架快速部署到該領(lǐng)域。NVIDIA JetPack 4.4 Developer Preview的初始軟件支持包括 CUDA Toolkit 10.2 和 cuDNN 8.0、TensorRT 7.1 和 DeepStream 5.0 的預(yù)覽版,以及用于機(jī)器學(xué)習(xí)和預(yù)訓(xùn)練 DNN 模型的新 Docker 容器。
Jetson Xavier NX 基于 NVIDIA 開(kāi)創(chuàng)性的 Xavier SoC,可以并行運(yùn)行多個(gè)復(fù)雜模型和多個(gè)高清傳感器流。它包括以下功能:
具有 48 個(gè)張量核心的集成 NVIDIA Volta 384 核 Volta GPU
兩個(gè) NVIDIA 深度學(xué)習(xí)加速器引擎
七向 VLIW 視覺(jué)加速器
六核 NVIDIA Carmel 64 位 ARMv8.2 CPU
8 GB 128 位 LPDDR4x
為了進(jìn)一步簡(jiǎn)化邊緣 AI 應(yīng)用程序在生產(chǎn)環(huán)境中的部署,NVIDIA 為 Jetson 帶來(lái)了云原生技術(shù),包括基于 Docker 的容器化以及硬件直通和 Kubernetes 等編排服務(wù),以及可從 NVIDIA NGC 注冊(cè)中心獲得的預(yù)訓(xùn)練模型和容器映像。
Jetson Xavier NX 開(kāi)發(fā)者套件
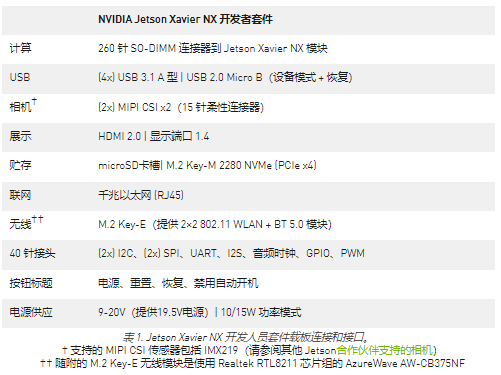
Jetson Xavier NX 開(kāi)發(fā)套件捆綁了一個(gè)開(kāi)源參考載板和預(yù)組裝的散熱器/風(fēng)扇,如圖 2 所示,包括一個(gè) 19V 電源和基于 M.2 的 802.11 WLAN+BT 模塊。除了可啟動(dòng)的 microSD 卡插槽外,載體底部還提供了一個(gè) M.2 Key-M NVMe 插槽,用于擴(kuò)展高速存儲(chǔ)。
由于 Xavier NX 模塊向后兼容 Jetson Nano (B01),它們的載板有一些共同點(diǎn)——還包括雙 MIPI CSI 攝像頭連接器,以及四個(gè) USB 3.1 端口、HDMI、DisplayPort、千兆以太網(wǎng)和一個(gè) 40-引腳 GPIO 頭。
套件載板的主要特性和接口如下表 1 所示。有關(guān) Jetson Xavier NX 計(jì)算模塊的核心處理能力和規(guī)格的更多信息,請(qǐng)參閱介紹 Jetson Xavier NX,世界上最小的 AI 超級(jí)計(jì)算機(jī)帖子和Jetson Xavier NX 模塊數(shù)據(jù)表。
JetPack 4.4 開(kāi)發(fā)者預(yù)覽版
NVIDIA JetPack SDK 包含用于在 Jetson 上構(gòu)建 AI 應(yīng)用程序的庫(kù)、工具和核心操作系統(tǒng)。JetPack 4.4 開(kāi)發(fā)者預(yù)覽版增加了對(duì) Jetson Xavier NX 的支持。除了表 2 中顯示的其他組件外,它還包括 CUDA Toolkit 10.2 以及 cuDNN 8.0、TensorRT 7.1、DeepStream 5.0 和用于部署云原生服務(wù)的 NVIDIA Container Runtime 的預(yù)覽版。用于流行機(jī)器的預(yù)構(gòu)建包安裝程序除了 NGC 上的 JetPack 新框架容器外,Jetson Zoo還提供 TensorFlow 和 PyTorch 等學(xué)習(xí)框架。
NVIDIA JetPack 4.4 開(kāi)發(fā)者預(yù)覽版
Linux For Tegra R32.4.2Ubuntu 18.04 LTS aarch64
CUDA 工具包10.2cuDNN 8.0 DP
張量RT 7.1 DPGStreamer 1.14.5
VisionWorks 1.6OpenCV 4.1.1
DeepStream 5.0 DPVPI 0.2 DP
OpenGL 4.6 / GLES 3.2伏爾甘 1.2
L4T 多媒體 API R32.4.2L4T阿格斯相機(jī) API 0.97
NVIDIA Nsight 系統(tǒng)2020.2NVIDIA Nsight 顯卡2020.1
NVIDIA SDK 管理器1.1.0NVIDIA 容器運(yùn)行時(shí)1.0.1
表 2. NVIDIA JetPack 4.4 Developer Preview SDK 中可用的軟件組件。
下載 適用于 Jetson Xavier NX、Jetson AGX Xavier、Jetson TX1/TX2 和 Jetson Nano 的JetPack 4.4 開(kāi)發(fā)者預(yù)覽版。收到新的 Jetson Xavier NX 開(kāi)發(fā)工具包后,按照入門(mén)指南中的說(shuō)明,用 JetPack 映像刷寫(xiě)您的 microSD 卡。
此開(kāi)發(fā)者預(yù)覽版可用于啟動(dòng)和運(yùn)行 Jetson Xavier NX 開(kāi)發(fā)者套件并開(kāi)始應(yīng)用程序開(kāi)發(fā),而生產(chǎn)的 JetPack 4.4 SDK 計(jì)劃于今年夏天晚些時(shí)候發(fā)布。安裝 JetPack 后,您可以跟隨一些 AI 驅(qū)動(dòng)的Jetson 社區(qū)項(xiàng)目。
深度學(xué)習(xí)推理基準(zhǔn)
Jetson 可用于將各種流行的 DNN 模型和 ML 框架部署到具有高性能推理的邊緣,用于實(shí)時(shí)分類(lèi)和對(duì)象檢測(cè)、姿勢(shì)估計(jì)、語(yǔ)義分割和自然語(yǔ)言處理 (NLP) 等任務(wù)。
JetPack SDK 和 NVIDIA CUDA-X 支持 Jetson 和 NVIDIA 獨(dú)立 GPU 通用,這意味著您可以輕松地將性能和尺寸、重量和功耗 (SWaP) 消耗降至 5W,而無(wú)需重新編寫(xiě)應(yīng)用程序。 圖 3 顯示了使用 JetPack 4.4 Developer Preview 和 TensorRT 7.1 在 Jetson Nano、Jetson TX2、Jetson Xavier NX 和 Jetson AGX Xavier 上流行的視覺(jué) DNN 的推理基準(zhǔn)。這些結(jié)果可以通過(guò)運(yùn)行 GitHub 上的 open jetson_benchmarks項(xiàng)目來(lái)重現(xiàn)。
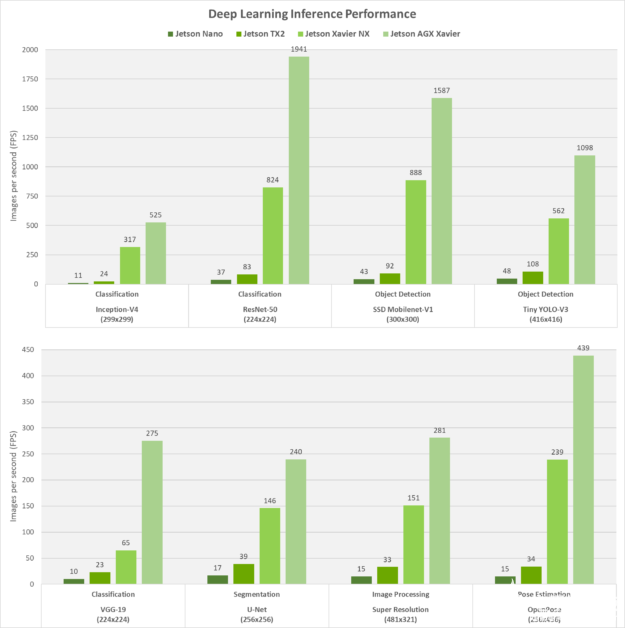
圖 3. Jetson 系列中使用 TensorRT 的各種基于視覺(jué)的 DNN 模型的推理性能。
在 Jetson Xavier NX 和 Jetson AGX Xavier 上,NVIDIA 深度學(xué)習(xí)加速器 (NVDLA) 引擎和 GPU 以 INT8 精度同時(shí)運(yùn)行,而在 Jetson Nano 和 Jetson TX2 上,GPU 以 FP16 精度運(yùn)行。Jetson Xavier NX 的性能比 Jetson TX2 高出多達(dá) 10 倍,功率相同,占用空間減少 25%。
在這些基準(zhǔn)測(cè)試中,每個(gè)平臺(tái)都以最高性能運(yùn)行(Jetson AGX Xavier 為 MAX-N 模式,Xavier NX 和 TX2 為 15W,Nano 為 10W)。這些基于視覺(jué)的任務(wù)的最大吞吐量是在批量大小不超過(guò) 15 毫秒的延遲閾值時(shí)獲得的。— 否則,對(duì)于平臺(tái)超過(guò)此延遲閾值的網(wǎng)絡(luò),批量大小為 1。這種方法在實(shí)時(shí)應(yīng)用程序的確定性低延遲要求和多流用例場(chǎng)景的最大性能之間提供了平衡。
我們還提供了BERT在問(wèn)答方面的基準(zhǔn)測(cè)試結(jié)果。BERT 是一種多功能架構(gòu),因其在多個(gè) NLP 任務(wù)中的成功應(yīng)用而越來(lái)越受歡迎,包括 QA、意圖分類(lèi)、情感分析、翻譯、名稱(chēng)/實(shí)體識(shí)別、釋義、推薦系統(tǒng)、自動(dòng)完成等。
BERT 傳統(tǒng)上過(guò)于復(fù)雜,無(wú)法在本地部署板載邊緣設(shè)備,尤其是 BERT Large 變體。但是,由于 TensorRT 中包含針對(duì) BERT 的 Tensor Core 優(yōu)化,BERT 可以輕松地在 Jetson Xavier NX 和 Jetson AGX Xavier 上運(yùn)行。
將 BERT 部署到邊緣對(duì)于低延遲、智能人機(jī)交互 (HMI) 和對(duì)話(huà)式 AI 很有用,如本文后面的多容器演示的聊天機(jī)器人部分,它還在本地執(zhí)行自動(dòng)語(yǔ)音識(shí)別 (ASR)并且不依賴(lài)于云連接。
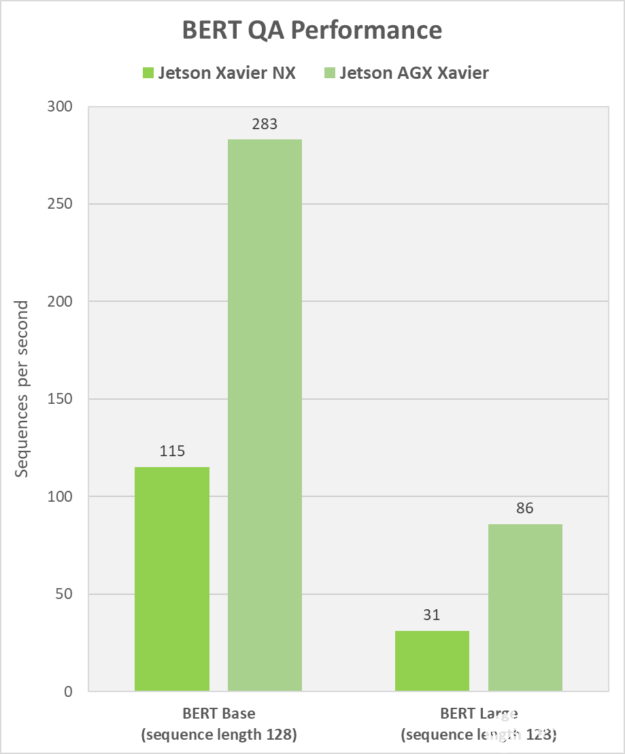
圖 4. BERT Base 和 BERT Large 在問(wèn)答時(shí)的運(yùn)行時(shí)性能,對(duì) NLP 任務(wù)使用 50 毫秒的延遲閾值。
圖 4 顯示了 BERT Base 和 BERT Large 在問(wèn)答方面的運(yùn)行時(shí)性能,對(duì) NLP 任務(wù)使用 50 毫秒的延遲閾值。這些結(jié)果以每秒的序列來(lái)衡量,其中每個(gè)文本序列都是 BERT 回答的查詢(xún)或問(wèn)題。Jetson 上的 BERT 性能為用戶(hù)提供近乎即時(shí)的反饋,延遲低至 5.9 毫秒。這允許 BERT 處理與其他實(shí)時(shí)處理流(例如視頻)同時(shí)執(zhí)行。
將云原生方法帶到邊緣
到目前為止,嵌入式和邊緣設(shè)備的軟件一直被編寫(xiě)為單片系統(tǒng)。升級(jí)單一軟件映像的復(fù)雜性增加了出現(xiàn)錯(cuò)誤的風(fēng)險(xiǎn),并使更新的節(jié)奏難以加快。這對(duì)于具有 AI 的邊緣設(shè)備來(lái)說(shuō)尤其成問(wèn)題,因?yàn)樗枰l繁更新以維持快速的能力改進(jìn)。現(xiàn)代對(duì)敏捷能力和持續(xù)創(chuàng)新(零停機(jī)時(shí)間)的期望要求改變嵌入式和邊緣設(shè)備軟件的開(kāi)發(fā)和部署方式。
在邊緣采用云原生范例,如微服務(wù)、容器化和容器編排是前進(jìn)的方向。
微服務(wù)架構(gòu)、容器化和編排使云應(yīng)用程序能夠擺脫單一工作流的約束。現(xiàn)在,Jetson 正在將云原生轉(zhuǎn)型理念帶入 AI 邊緣設(shè)備。
Jetson 是領(lǐng)先的 AI 邊緣計(jì)算平臺(tái),擁有近 50 萬(wàn)開(kāi)發(fā)人員。它由 JetPack SDK 提供支持,具有與全球數(shù)據(jù)中心和工作站相同的 CUDA-X 加速計(jì)算堆棧和 NVIDIA Container Runtime。
借助 Jetson 的多個(gè)開(kāi)發(fā)和部署容器、容器化框架和托管在NVIDIA NGC上的預(yù)訓(xùn)練 AI 模型,它可以作為 AI 應(yīng)用程序開(kāi)發(fā)的構(gòu)建塊。最新的 Jetson Xavier NX 以盡可能小的外形尺寸實(shí)現(xiàn)功能齊全的多模式 AI 應(yīng)用程序。
我們歡迎云原生技術(shù),這些技術(shù)使客戶(hù)具有擴(kuò)展業(yè)務(wù)所需的生命周期敏捷性。可擴(kuò)展的軟件開(kāi)發(fā)加快了上市時(shí)間。為什么?因?yàn)楫?dāng)您不必同時(shí)更新其他應(yīng)用程序組件時(shí),更新產(chǎn)品生命周期變得不那么繁重。
多容器演示
Jetson Xavier NX的 NVIDIA多容器演示展示了使用云原生方法開(kāi)發(fā)和部署服務(wù)機(jī)器人 AI 應(yīng)用程序的過(guò)程。服務(wù)機(jī)器人是自主機(jī)器人,通常與零售、酒店、醫(yī)療保健或倉(cāng)庫(kù)中的人員進(jìn)行交互。
視頻。Jetson Xavier NX 的云原生多容器演示,并行運(yùn)行七個(gè)深度學(xué)習(xí)模型。
考慮一個(gè)服務(wù)機(jī)器人,其目的是通過(guò)與購(gòu)物者互動(dòng)來(lái)改善零售百貨商店的客戶(hù)服務(wù)。如果機(jī)器人能夠執(zhí)行許多計(jì)算任務(wù),包括人類(lèi)識(shí)別、交互檢測(cè)、人體姿態(tài)檢測(cè)、語(yǔ)音檢測(cè)和自然語(yǔ)言處理,它只能為客戶(hù)查詢(xún)提供有用的答案。機(jī)器人必須運(yùn)行支持這些功能所需的多個(gè) AI 模型。
借助云原生方法,人工智能模型可以獨(dú)立開(kāi)發(fā)、容器化并包含所有依賴(lài)項(xiàng),并部署到任何 Jetson 設(shè)備上。
該演示在 Jetson Xavier NX 上同時(shí)運(yùn)行四個(gè)容器,其中包含七個(gè)深度學(xué)習(xí)模型,包括姿勢(shì)估計(jì)、面部和凝視檢測(cè)、人數(shù)統(tǒng)計(jì)、語(yǔ)音識(shí)別和 BERT 問(wèn)答。結(jié)果是,這些服務(wù)構(gòu)建塊容器可以輕松修改和重新部署而不會(huì)中斷,從而提供零停機(jī)時(shí)間和無(wú)縫更新體驗(yàn)。
Jetson Xavier NX 的計(jì)算能力使您能夠一次運(yùn)行所有這些容器,而不會(huì)犧牲跨多個(gè)傳感器數(shù)據(jù)流的實(shí)時(shí)性能。您可以使用托管在 NGC 上的容器從NVIDIA-AI-IOT/jetson-cloudnative-demo GitHub 存儲(chǔ)庫(kù)下載演示。
關(guān)于作者
Dustin 是 NVIDIA Jetson 團(tuán)隊(duì)的一名開(kāi)發(fā)人員推廣員。Dustin 擁有機(jī)器人技術(shù)和嵌入式系統(tǒng)方面的背景,喜歡在社區(qū)中提供幫助并與 Jetson 合作開(kāi)展項(xiàng)目。您可以在NVIDIA 開(kāi)發(fā)者論壇或GitHub 上找到他。
Suhas Sheshadri 是 NVIDIA 的產(chǎn)品經(jīng)理,專(zhuān)注于 Jetson 軟件。他之前曾在 NVIDIA 的自動(dòng)駕駛團(tuán)隊(duì)工作,為 NVIDIA Drive 平臺(tái)優(yōu)化系統(tǒng)軟件。在空閑時(shí)間,Suhas 喜歡閱讀有關(guān)量子物理學(xué)和博弈論的書(shū)籍。
Sarah Todd 是一名產(chǎn)品營(yíng)銷(xiāo)經(jīng)理,專(zhuān)注于 Metropolis 解決方案的 GTM 戰(zhàn)略,促進(jìn)跨行業(yè)的應(yīng)用程序集成。此前,Sarah 曾在 Autonomous Machines 團(tuán)隊(duì)擔(dān)任營(yíng)銷(xiāo)傳播經(jīng)理,該團(tuán)隊(duì)支持 Jetson、Isaac、DeepStream、TAO Toolkit 等 NVIDIA 產(chǎn)品。
審核編輯:郭婷
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28380瀏覽量
206916 -
NVIDIA
+關(guān)注
關(guān)注
14文章
4978瀏覽量
102987
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
NVIDIA發(fā)布小巧高性?xún)r(jià)比的Jetson Orin Nano Super開(kāi)發(fā)者套件
NVIDIA 推出高性?xún)r(jià)比的生成式 AI 超級(jí)計(jì)算機(jī)

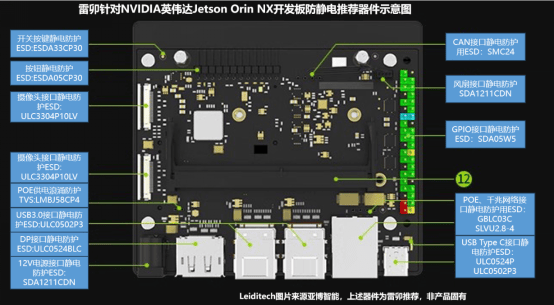
雷卯針對(duì)NVIDIA英偉達(dá)JETSON Orin NX開(kāi)發(fā)板防靜電推薦器件示意圖
KaihongOS 4.1.2開(kāi)發(fā)者預(yù)覽版正式上線(xiàn),誠(chéng)邀開(kāi)發(fā)者免費(fèi)試用!

KaihongOS 4.1.2開(kāi)發(fā)者預(yù)覽版正式上線(xiàn),誠(chéng)邀開(kāi)發(fā)者免費(fèi)試用!
NVIDIA RTX AI套件簡(jiǎn)化AI驅(qū)動(dòng)的應(yīng)用開(kāi)發(fā)
借助OpenUSD和NVIDIA Omniverse開(kāi)發(fā)數(shù)字孿生應(yīng)用
NVIDIA將全球數(shù)百萬(wàn)開(kāi)發(fā)者轉(zhuǎn)變?yōu)樯墒?AI 開(kāi)發(fā)者
NVIDIA NIM 革命性地改變模型部署,將全球數(shù)百萬(wàn)開(kāi)發(fā)者轉(zhuǎn)變?yōu)樯墒?AI 開(kāi)發(fā)者

NVIDIA與微軟擴(kuò)展合作,幫助開(kāi)發(fā)者更快構(gòu)建和部署AI應(yīng)用
Nvidia Jetson Nano + CYW55573/AWXB327MA-PUR M.2無(wú)法使用操作系統(tǒng)內(nèi)置的網(wǎng)絡(luò)管理器管理Wi-Fi如何解決?
英特爾開(kāi)發(fā)套件『哪吒』在Java環(huán)境實(shí)現(xiàn)ADAS道路識(shí)別演示 | 開(kāi)發(fā)者實(shí)戰(zhàn)

【轉(zhuǎn)載】英特爾開(kāi)發(fā)套件“哪吒”快速部署YoloV8 on Java | 開(kāi)發(fā)者實(shí)戰(zhàn)

華為宣布HarmonyOS NEXT鴻蒙星河版開(kāi)發(fā)者預(yù)覽面向開(kāi)發(fā)者開(kāi)放申請(qǐng)

NVIDIA DOCA 2.5 長(zhǎng)期支持版本發(fā)布





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論