") NVIDIA Jetson Nano 2GB開發(fā)套件的應(yīng)用
NVIDIA Jetson Nano 2GB開發(fā)套件的應(yīng)用
NVIDIA 推出了最初的 Jetson NANO開發(fā)者工具包,使開發(fā)者、學(xué)生和愛好者能夠?qū)W習(xí)、探索和構(gòu)建邊緣設(shè)備的人工智能應(yīng)用程序。狂熱者社區(qū)的迅速采用使它成為我們最喜愛的開發(fā)工具包,并引發(fā)了一場 Jetson 運動。新的 NVIDIA Jetson Nano 2GB 開發(fā)工具包的價格為 59 美元,這使得它對于學(xué)習(xí)人工智能和機器人技術(shù)來說更加實惠。這款開發(fā)工具包是終極的入門級人工智能電腦,從 2020 年 10 月底開始在全球范圍內(nèi)發(fā)售。
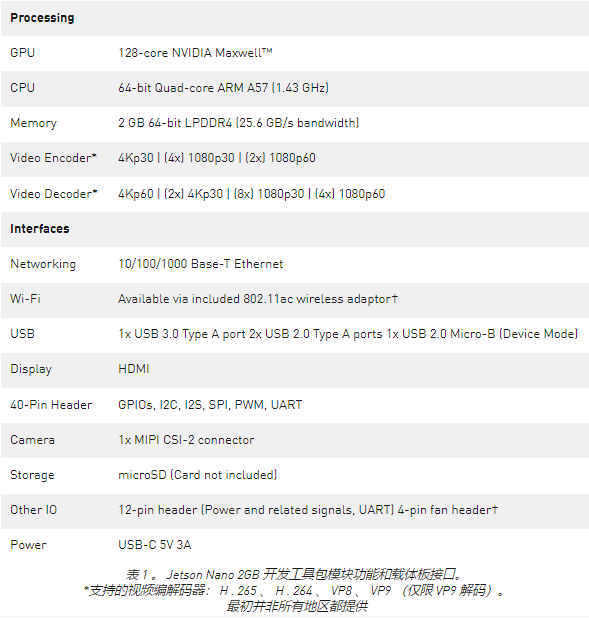
Jetson Nano 2GB 開發(fā)工具包包括一個帶有 2GB 內(nèi)存的 Jetson NANO 模塊,通過 128 核 NVIDIA Maxwell GPU 和 64 位四核 Arm A57CPU 提供 472 GFLOPS 的計算性能。附帶的載體板配備了 edge 和嵌入式項目開發(fā)中常用的接口,包括 USB 3 . 0 和 USB 2 . 0 端口,用于連接包括 USB 攝像頭在內(nèi)的外圍設(shè)備,一個 MIPI CSI-2 攝像頭連接器,一個 40 針頭,可與許多外設(shè)和附加組件兼容, HDMI 顯示接口,和一個千兆以太網(wǎng)端口。開發(fā)工具包還包括一個 802 . 11ac 無線網(wǎng)絡(luò) USB 適配器。
強大的性能
Jetson Nano 2GB 開發(fā)工具包是學(xué)習(xí)現(xiàn)代人工智能的理想選擇。人工智能計算的科學(xué)變化很快,研究人員不斷發(fā)明新的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),以提供更好的準確性和性能。如今,人工智能實踐者在他們的項目中使用了各種各樣的人工智能模型和框架,因此學(xué)習(xí)和創(chuàng)建人工智能項目的理想平臺是一個足夠靈活的平臺,能夠運行一系列不同的人工智能模型,并且能夠提供創(chuàng)造有意義的交互式人工智能體驗所需的性能。 Jetson Nano 2GB 開發(fā)工具包不僅支持所有流行的人工智能框架和網(wǎng)絡(luò),還提供了強大的人工智能性能。
圖 2 顯示了在圖像分類、分割、目標檢測、圖像處理和姿勢估計等方面使用流行的 DNN 模型測量的 AI 推理性能。利用 NVIDIA TensorRT 對網(wǎng)絡(luò)進行優(yōu)化,并加速推理過程,以提高實時性。 Jetson Nano 2GB 開發(fā)工具包在這個價格范圍內(nèi)提供如此強大的推理性能是獨一無二的。
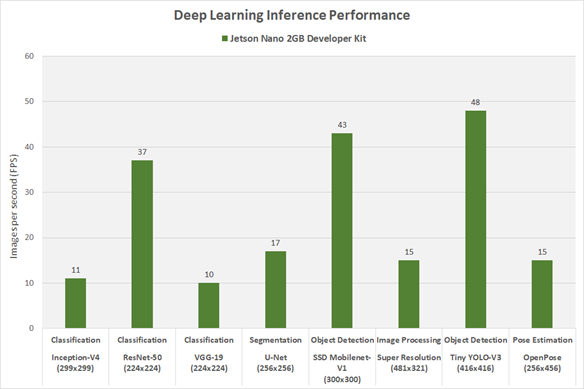
圖 2 。 Jetson Nano 2GB 顯影劑套件推斷性能( FP16 ),適用于 JetPack 4 . 4 . 1 和 TensorRT 7 . 1 的各種基于視覺的 DNN 模型。
易用性和探索的靈活性
Jetson Nano 2GB 開發(fā)工具包提供了一個隨時可用的平臺的開發(fā)體驗,而不會限制您使用各種相機、傳感器和外圍設(shè)備親自探索人工智能的好奇心。它由 JetPack 軟件開發(fā)工具包( SDK )提供支持,其中包括熟悉的 Linux 桌面開發(fā)體驗。 JetPack 附帶構(gòu)建端到端人工智能應(yīng)用程序所需的庫。例如, OpenCV 和 VisionWorks 可用于計算機視覺和圖像處理; CUDA 、 cuDNN 和 TensorRT 可加速人工智能推斷;還包括用于相機和傳感器處理的庫等。
與純云學(xué)習(xí)平臺不同,開發(fā)者工具包支持人工智能社區(qū)中許多流行的傳感器,如 Raspberry Pi 攝像頭、 Intel Real sense 攝像頭、 ZED 3D 攝像頭以及其他 USB 攝像頭和外圍設(shè)備,這些都是現(xiàn)成的。 Jetpack4 . 4 . 1 引入了對這種新的開發(fā)工具包的支持,并將于 2020 年 10 月底開始提供,與開發(fā)工具包的可用性保持一致。有關(guān)詳細信息,請參閱 Jetpack 頁。
您可以使用您選擇的 AI 框架學(xué)習(xí)和開發(fā),包括 TensorFlow 、 PyTorch 和 MXNet 。 TensorFlow 和 PyTorch 的開發(fā)容器托管在 NVIDIA NGC 上,這提供了一種快速的一步到位的方法來啟動和運行框架環(huán)境。預(yù)裝了 TensorFlow 、 PyTorch 、 NumPy 、 scikit learn 、 SciPy 和 pandas 的 Jupyter 筆記本學(xué)習(xí)環(huán)境也可以使用同樣托管在 NGC 上的 機器學(xué)習(xí)容器 輕松安裝到開發(fā)人員工具包上。
關(guān)于作者
Suhas Sheshadri 是 NVIDIA 的產(chǎn)品經(jīng)理,專注于 Jetson 軟件。此前,他曾在 NVIDIA 與自主駕駛團隊合作,為 NVIDIA 驅(qū)動平臺優(yōu)化系統(tǒng)軟件。
Dustin Franklin 是 NVIDIA 的 Jetson 團隊的開發(fā)人員布道者。 Dustin 擁有機器人和嵌入式系統(tǒng)方面的背景,他樂于在社區(qū)中提供幫助,并與 Jetson 一起參與項目。你可以在 NVIDIA Developer Forums 或 Github 上找到他。
審核編輯:郭婷
-
嵌入式
+關(guān)注
關(guān)注
5088文章
19160瀏覽量
306598 -
機器人
+關(guān)注
關(guān)注
211文章
28578瀏覽量
207793 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5063瀏覽量
103425
發(fā)布評論請先 登錄
相關(guān)推薦
NVIDIA發(fā)布小巧高性價比的Jetson Orin Nano Super開發(fā)者套件
NVIDIA 推出高性價比的生成式 AI 超級計算機

【正點原子STM32H7R3開發(fā)套件試用體驗】開發(fā)套件開箱報告
MSP430G2553 LaunchPad?開發(fā)套件(MSP-EXP430G2ET)用戶指南

AM243x LaunchPad?開發(fā)套件用戶指南
TPS63802HDKEVM-硬件開發(fā)套件
中科創(chuàng)達旗下創(chuàng)通聯(lián)達Qualcomm RB3 Gen 2 Lite開發(fā)套件上市銷售
Nvidia Jetson Nano + CYW55573/AWXB327MA-PUR M.2無法使用操作系統(tǒng)內(nèi)置的網(wǎng)絡(luò)管理器管理Wi-Fi如何解決?
SC171開發(fā)套件V2 技術(shù)資料
硬件平臺介紹及使用(SC171開發(fā)套件V2)
【產(chǎn)品單頁】5G AIoT開發(fā)套件V2
【LicheeRV-Nano開發(fā)套件試用體驗】+智能平板開發(fā)
【LicheeRV-Nano開發(fā)套件試用連載體驗】+ 實現(xiàn)三麥克納姆輪小車自主導(dǎo)航
DA1453x Pro開發(fā)套件硬件說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論