 高壓放大器在基液態金屬微型馬達的應用
高壓放大器在基液態金屬微型馬達的應用
實驗目的:利用兼具“液態”和“金屬”屬性的家基液態金屬,制備成家基液態金屬微型馬達,分別采用磁場和電場的驅動方式來操控馬達實現二維/三維的運動,分析微型馬達的運動形式和驅動機制。
實驗設備:原子力顯微鏡,告訴光學相機,ATA-2082高壓放大器,X射線光電子能譜儀,穩態瞬態熒光光譜儀,高功率超聲波清洗器等。
實驗過程:
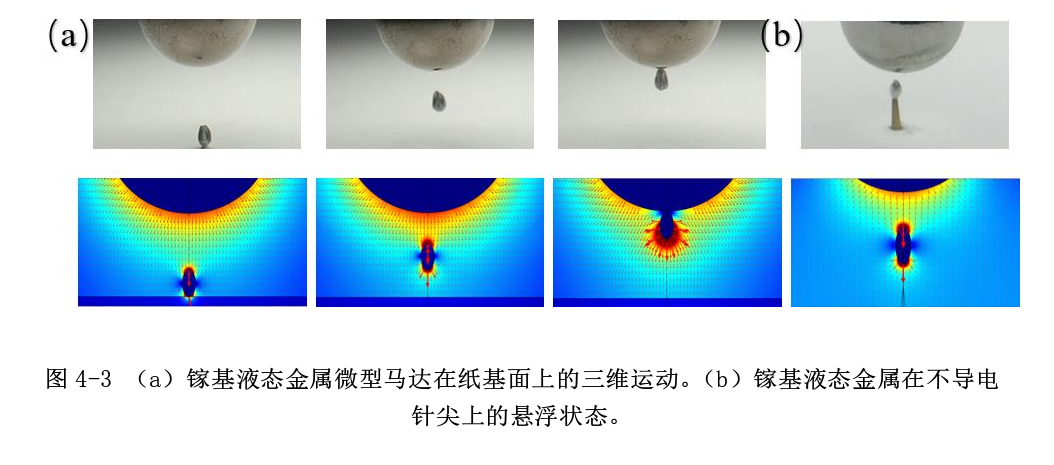
主要利用銅制的球形(~2mm)正極微電極系統來驅動和引導家基液態金屬微型馬達。實驗中,通過在微電極上施加一個電壓(10kV),家基液態金屬微型馬達可以在垂直于木質板子上面的紙基面上進行三維跳動。
其次,為了進一步提高家基液態金屬微型馬達的三維運動的靈活性和可靠性。設計了一個控制平臺。通過控制平臺來實現對家基液態金屬微型馬達點對點的精準操控。馬達控制平臺系統由輸入指令的互動媒體端、可以產生模擬信號的電源端、放大信號的電壓放大器端以及接收放大信號的操控芯片組成。
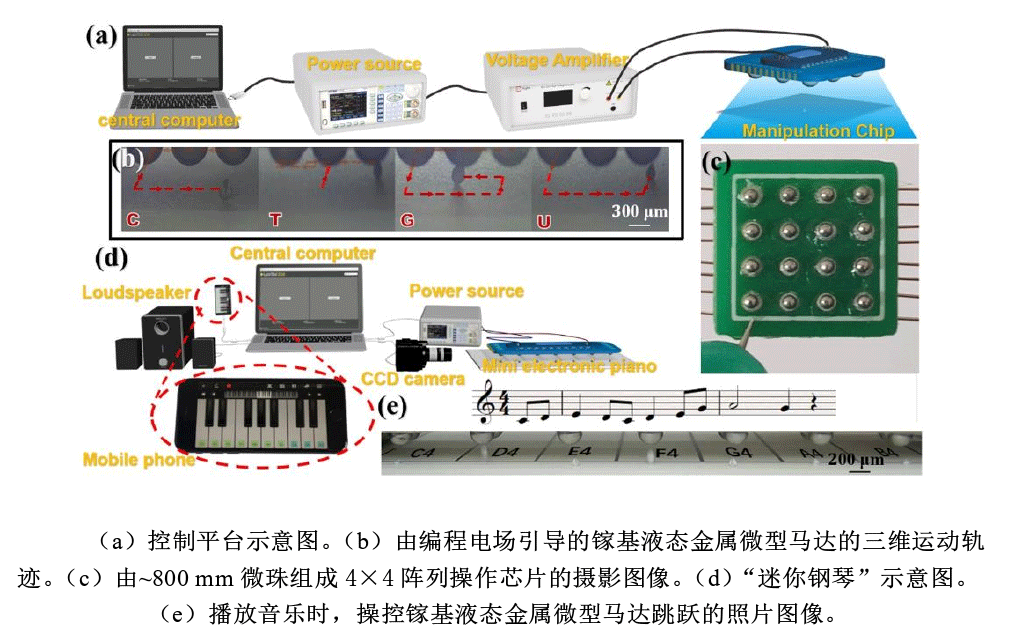
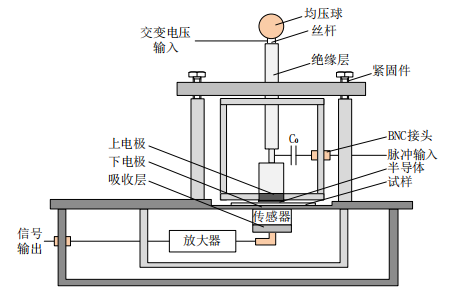
如圖所示。輸入指令的互動媒體端主要是由預先裝好指令程序的計算機組成的。在指令程序中預先設定好指令信號串,指令信號串通過轉換電源轉換成模擬信號,模擬信號通過高壓放大器放大信號脈沖,放大后的信號脈沖傳輸到接受放大信號的操控芯片上。馬達就會按著預先設計好的指令信號串實現沿著固定軌道的三維跳躍運動。操控芯片上的延時電路使脈沖信號傳輸到后一個微電極上,導致前一個微電極局部電場消失,后一個微電極上產生局部電場從而將馬達拉到后端微電極與可觸摸壓力感應基底之間跳動。可觸摸壓力感應基底通過感應馬達跳動過程中對其底部產生的壓力來向信號轉化器傳輸壓力信號,信號轉換器將壓力信號轉換為電信號傳輸給能將電信號轉換為音樂音符的音響設備。音響設備就會發出我們輸入設備輸入的那個音符。就仿佛像是在我們操控家基金屬微型馬達在彈奏鋼琴。
實驗結果:
通過對家基液態金屬微米馬達的運動控制和形態重塑及的研究,有助于對其的驅動性能進行優化,推動其在包括化學傳感、負載貨物運輸、材料科學甚至人工智能等領域進行應用。
實驗中所用到的ATA-2082高壓放大器參數指標:
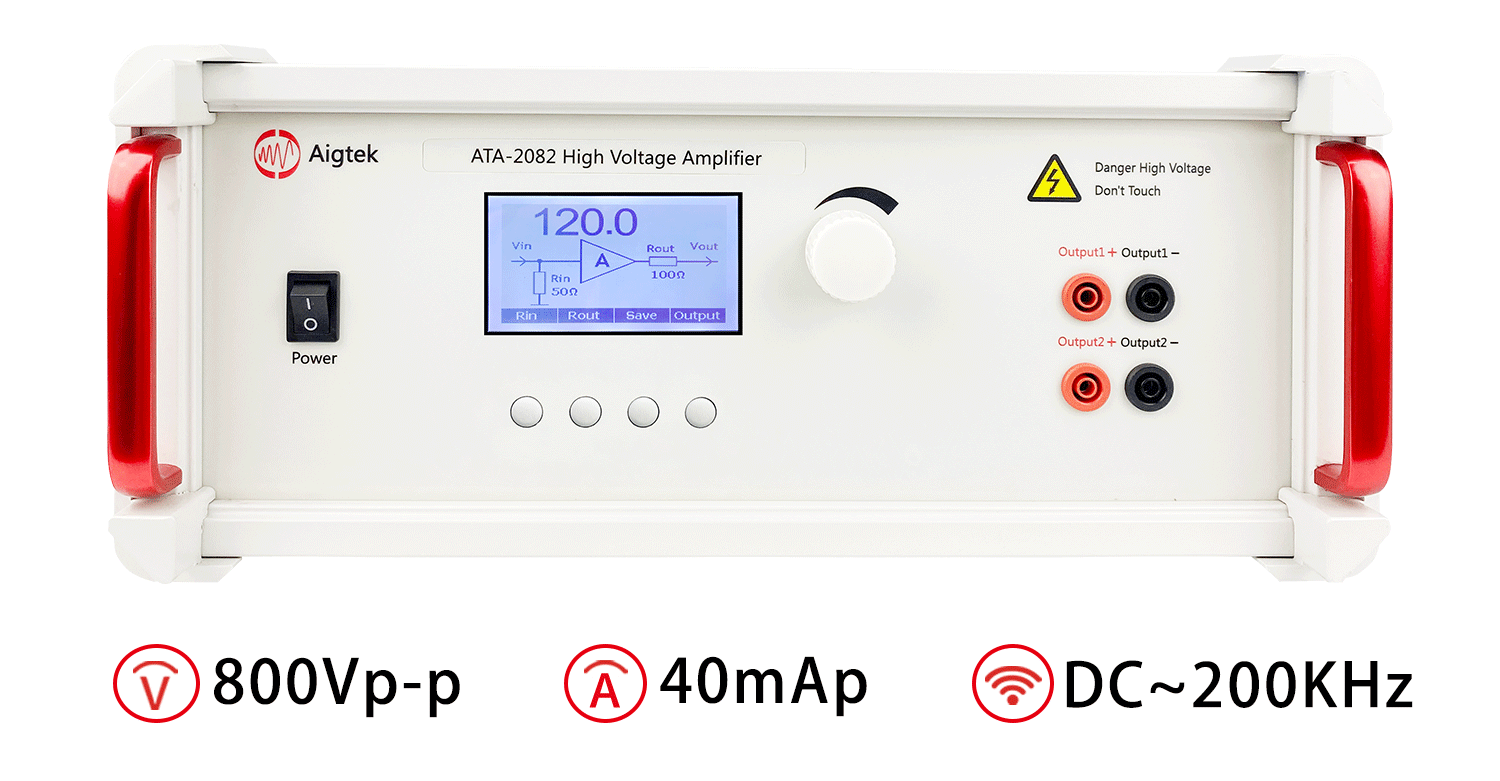
本實驗素材由西安安泰電子發布,如想了解更多有關高壓放大器應用,請持續關注安泰電子。
審核編輯:湯梓紅
-
運動控制
+關注
關注
4文章
579瀏覽量
32857 -
馬達
+關注
關注
1文章
820瀏覽量
62269 -
高壓放大器
+關注
關注
4文章
490瀏覽量
14358
發布評論請先 登錄
相關推薦
新品發布| ATA-7100高壓放大器!


安泰高壓放大器在工業領域中的應用

安泰高壓放大器指標參數有哪些要求

Aigtek高壓放大器指標有哪些要求呢

ATA-2032:高壓放大器的選型原則是什么





西安安泰電子高壓放大器及功率放大器的性能如何驗證

高壓放大器的考慮因素有哪些





 工商網監
工商網監
評論