 運動控制+機器視覺Demo軟件框架(三)視覺糾偏
運動控制+機器視覺Demo軟件框架(三)視覺糾偏
內容回顧
回顧之前課程我們對運動控制 +機器視覺例程Demo的相機標定和形狀匹配兩大模塊進行了大致的介紹。目前我們已經基本上講完了所有功能模塊。接下本期課程講解一下如何通過該例程進行配方編輯實現視覺糾偏的連續插補功能的工藝文件,方便大家去理解該例程。
01開發環境介紹
一、硬件平臺

運動控制機器視覺實訓平臺,包括VPLC532視覺控制器、4個步進電機、相機、光源、光源控制器、帶HDMI接口的工業顯示屏等相關硬件配置。
二、軟件平臺
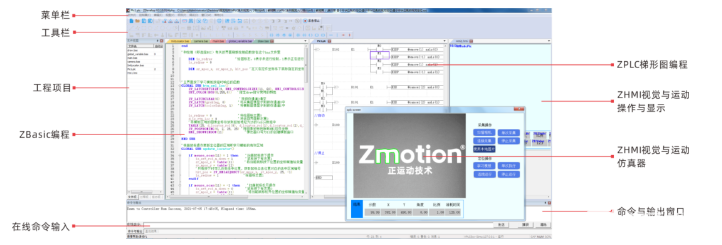
ZDevelop 是正運動技術ZMoiton系列運動控制器的PC端程序開發調試與診斷軟件,通過它用戶能夠直接對控制器進行程序編輯與配置,快速開發應用、實時診斷系統運行參數以及對運動控制。
ZDevelop支持三種編程方式,分別為ZBasic、ZPLC梯形圖、ZHMI組態,使用ZDevelop軟件編寫的程序可以下載到正運動控制器里,也可以下載到仿真器在PC平臺仿真運行。
02設置視覺糾偏和連續插補操作
一、配置系統參數
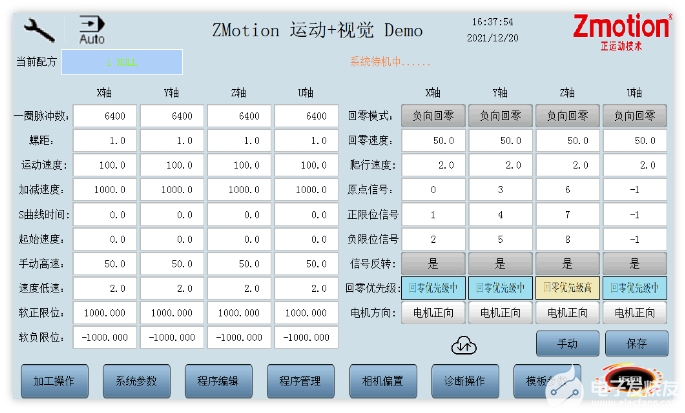
點擊《系統參數》進入系統參數配置界面,按照機臺的實際情況進行以上參數的設置,然后點擊《保存》即可完成配置。
二、計算相機中心和加工中心的偏移量

點擊《相機偏置》進入相機偏置界面。通過手動運動先使相機中心對準機臺上的某點如A點,然后點擊《記錄相機中心坐標》。
接著繼續通過手動運動使加工中心對準機臺是的A點,然后點擊《記錄加工中心坐標》。
最后點擊《計算偏移量》完成相機中心和加工中心的偏移量的計算。其中計算出來的偏移量是掉電保存的,其他的坐標數據沒有保存。
三、相機標定
先在相機偏置界面點擊《手動》打開手動運動窗口,并點擊《開始連續采集》開啟采集模式,然后手動運動使標定的Mark點移動的相機視野的中心位置。
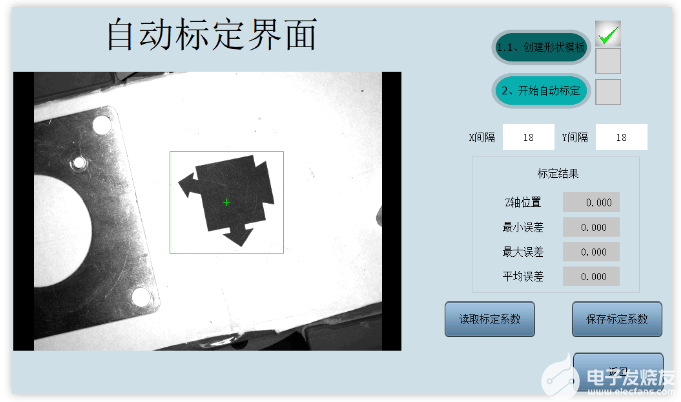
接著點擊《標定》進入相機標定界面,點擊《1.0、顯示ROI》調出矩形ROI。然后通過鼠標移動ROI將Mark點框選起來,之后點擊《1.1、創建形狀模板》即可完成標定模板創建。
最后設置好X、Y的運動間隔后點擊《2、開始標定》,等待標定OK的窗口彈出 后再點擊《保存標定系數》完成標定系數的保存。
四、打開一個空的程序文件

點擊《程序管理》進入程序管理界面,然后選擇空的程序文件,再通過鼠標長按紅色框選區域的按鈕500ms后松開,即可打開該程序文件并自動進入程序編輯界面。
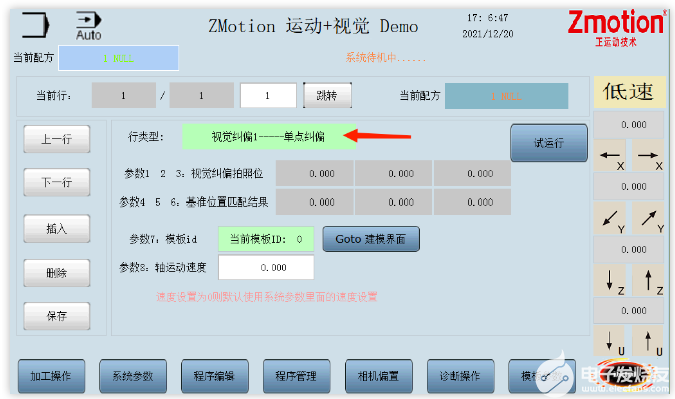
五、添加第1行指令--視覺糾偏
第一步
第二步
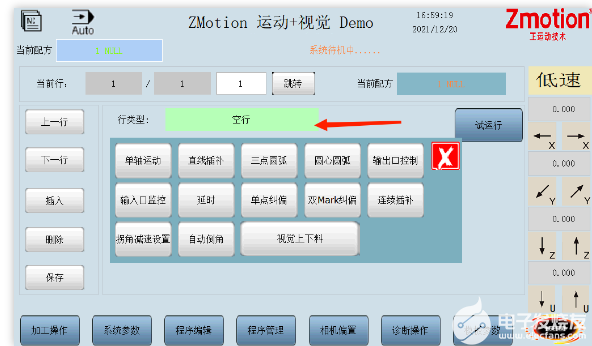
點擊《空行》位置,彈出當前行指令選擇窗口,選擇單點糾偏。然后點擊《Goto建模界面》,然后手動運動到視覺糾偏拍照位位置,進行視覺糾偏模板的創建。
六、添加第2行指令--開啟連續插補

點擊《下一行》進入下一行的編輯,點擊《空行》位置,彈出當前行指令選擇窗口,選擇連續插補,并設置連續插補功能為ON。
七、添加程序的其它運動指令

點擊《下一行》進入下一行的編輯,點擊《空行》位置,彈出指令選擇窗口,選擇合適的運動指令完成連續插補軌跡的示教。
八、保存程序文件

完成程序文件的編輯后長按《保存》按鈕 0.5S ,完成程序文件的保存。
九、程序文件的運行

返回加工操作界面,進行系統的復位。完成系統復位后點擊啟動按鈕即可確定該程序文件。
本次,正運動技術運動控制+機器視覺Demo軟件框架(三):視覺糾偏+連續插補的配方編輯,就分享到這里。
審核編輯:符乾江
-
運動控制器
+關注
關注
2文章
401瀏覽量
24705 -
運動控制卡
+關注
關注
7文章
111瀏覽量
15452
發布評論請先 登錄
相關推薦

適用于機器視覺應用的智能機器視覺控制平臺







 工商網監
工商網監
評論