") 什么是VR位置追蹤,VR位置常見追蹤方案
什么是VR位置追蹤,VR位置常見追蹤方案
1. 什么是 VR 位置追蹤
我們常說的 VR 位置追蹤,主要是指 頭顯、控制器的位置跟蹤(6Dof)
1.1 VR 定位參考標準
追蹤(Tracking)
- 6Dof(定位、旋轉(zhuǎn)、移動),360°
- 精度(毫米級)
- 抗噪(無抖動噪音)
- 追蹤范圍(追蹤范圍、視域)
- 多目標追蹤
延遲(Latency)
- 動作發(fā)生到屏幕顯示 < 20ms
2. 常見追蹤方案
2.1 無線追蹤
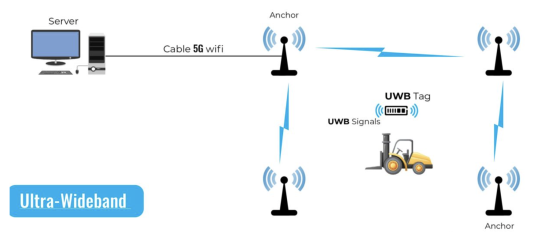
無線追蹤使用一組定位器,圍繞跟蹤空間的周邊放置,并且跟蹤一個或多個標簽。該系統(tǒng)在概念上與 GPS 類似,有時也稱為室內(nèi) GPS 。標簽 三角剖分 使用圍繞周邊放置的錨點來確定其 3D 位置。常見無線方案有IR、RFID、藍牙、WiFi、UWB等
優(yōu)點:用戶體驗不受限制的運動,允許更大范圍的運動
缺點:低采樣率會降低精度,相對于其他傳感器,延遲較高
2.2 聲學(xué)追蹤
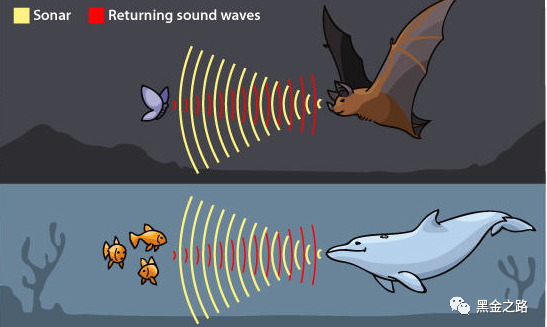
聲學(xué)跟蹤系統(tǒng)使用類似于動物的自然識別技術(shù)來識別物體或設(shè)備的位置回聲定位。類似于蝙蝠使用到兩只耳朵的聲波返回時間的差異來定位物體的方法,VR 中的聲學(xué)跟蹤系統(tǒng)可能會在設(shè)備上使用至少三個超聲波傳感器和至少三個超聲波發(fā)射器的集合,以計算物體的位置和方向(例如手持控制器)。
有兩種方法可以確定物體的位置:測量聲波從物體表面的飛行時間。發(fā)射機通過接收傳輸?shù)?a target="_blank">接收器或正弦聲波的相位相干
優(yōu)點:精確測量坐標和角度,傳感器小巧輕便,在設(shè)計中具有更大的靈活性 設(shè)備便宜且易于生產(chǎn),且無電磁干擾
缺點:基于環(huán)境溫度,大氣壓力和濕度的聲速變化會導(dǎo)致距離計算中的誤差 范圍有限,并且在發(fā)射器和接收器之間需要直接的視線 聲音干擾(即周圍環(huán)境中的其他聲音)可能會影響讀數(shù)
2.3 磁跟蹤
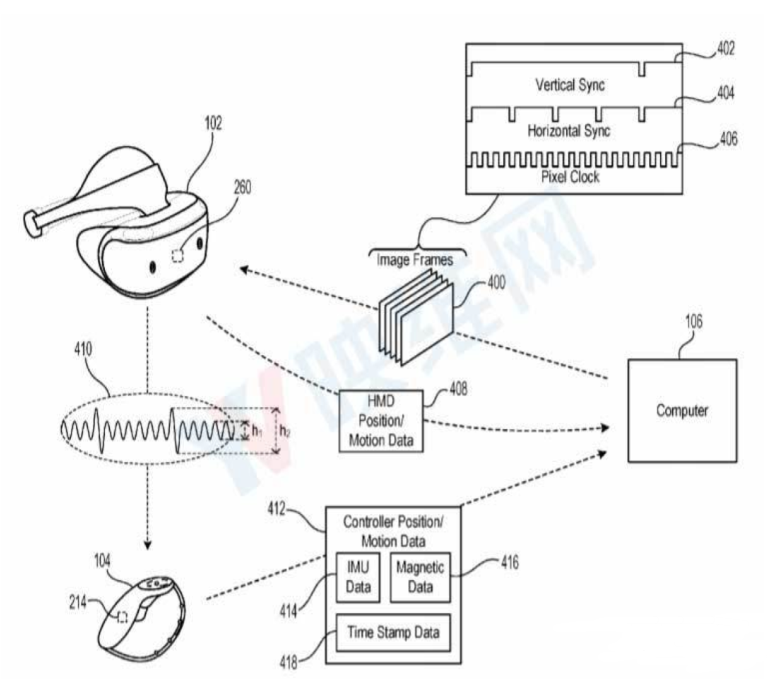
電磁追蹤系統(tǒng)一般由電磁場發(fā)射器、接收器和電子控制單元組成,利用安裝在人體上的傳感器。電磁場發(fā)射器使用交流電或者直流電發(fā)射低頻電磁場,作為傳感器的接收器安裝在人體上測量磁通量的變化。發(fā)射器和接收器都連接到電子控制單元,電子控制單元輸出傳感器捕獲的數(shù)據(jù)到計算機,以用來推算被蹤物體或部位6自由度的位置和方位
優(yōu)點:使用不需要用戶佩戴且不會干擾虛擬現(xiàn)實體驗的非干擾性設(shè)備;適用于完全身臨其境的虛擬現(xiàn)實顯示器
缺點:用戶需要靠近基極發(fā)射器;金屬或干擾電磁場的物體附近的跟蹤惡化;由于頻繁的校準要求,往往會有很多誤差和抖動
2.4 慣性追蹤
慣性跟蹤主要利用 加速度計 和 陀螺儀技術(shù)。加速度計可測量線性加速度。由于位置相對于時間的導(dǎo)數(shù)是速度,速度的導(dǎo)數(shù)是加速度,因此可以對加速度計的輸出進行積分以找到速度,然后再次對其進行積分以找到相對于某個初始點的位置。 陀螺儀 解決 角速度。角速度也可以積分以確定相對于初始點的角位置。慣性測量單位系統(tǒng)(IMU) 基于 MEMS技術(shù) 允許以高更新率和最小延遲來跟蹤空間中的方向(橫搖,俯仰,偏航)。
航位推算 用于跟蹤位置數(shù)據(jù),該位置數(shù)據(jù)通過更新用戶的運動變化來更改虛擬環(huán)境。虛擬現(xiàn)實系統(tǒng)中使用的航位推算更新率和預(yù)測算法會影響用戶體驗。僅依靠慣性跟蹤來確定精確位置非常困難,因為 航位推算 導(dǎo)致漂移,因此在虛擬現(xiàn)實中常與光學(xué)追蹤配合使用(一般用IMU數(shù)據(jù)做輔助矯正)
優(yōu)點:可以很好地跟蹤相對于其他傳感器的快速運動,尤其是與其他傳感器結(jié)合使用時;能夠獲得高更新率;
缺點:容易產(chǎn)生錯誤,由于推算錯誤,這些錯誤會迅速累積;確定位置時的任何延遲或計算錯誤都會導(dǎo)致用戶出現(xiàn)惡心或頭痛等癥狀;可能無法跟上移動速度太快的用戶;慣性傳感器通常只能在室內(nèi)和實驗室環(huán)境中使用,因此室外應(yīng)用受到限制;
2.5 光學(xué)追蹤
光學(xué)跟蹤使用頭戴式眼鏡或放置在頭戴式眼鏡上的攝像頭,根據(jù)相關(guān)計算機視覺算法實現(xiàn) 3D 位置追追蹤。在光學(xué)跟蹤中,將對攝像機進行校準,以確定到物體的距離及其在空間中的位置。
光學(xué)系統(tǒng) 是可靠的且相對便宜,但它們可能難以校準。此外,該系統(tǒng)需要沒有遮擋的直接光線,否則它將接收錯誤的數(shù)據(jù)
2.5.1 標記
1)標記跟蹤方案
將具有已知模式的目標用作參考點,相機會不斷尋找這些標記,然后使用各種算法(例如, POSIT算法)以提取對象的位置。標記是可見的,例如已打印 二維碼,反光材料等。主動實施的功能是帶有內(nèi)置 IR LED 燈的標記,可以打開和關(guān)閉該燈以與攝像機同步,從而更容易在跟蹤區(qū)域中遮擋其他 IR 燈。被動實現(xiàn)是 后向反射鏡 它將紅外光以很小的散射量反射回光源
2)無標記跟蹤方案
不需要任何預(yù)先放置的目標,而是使用周圍環(huán)境的自然特征來確定位置和方向
2.5.2 Outside-in
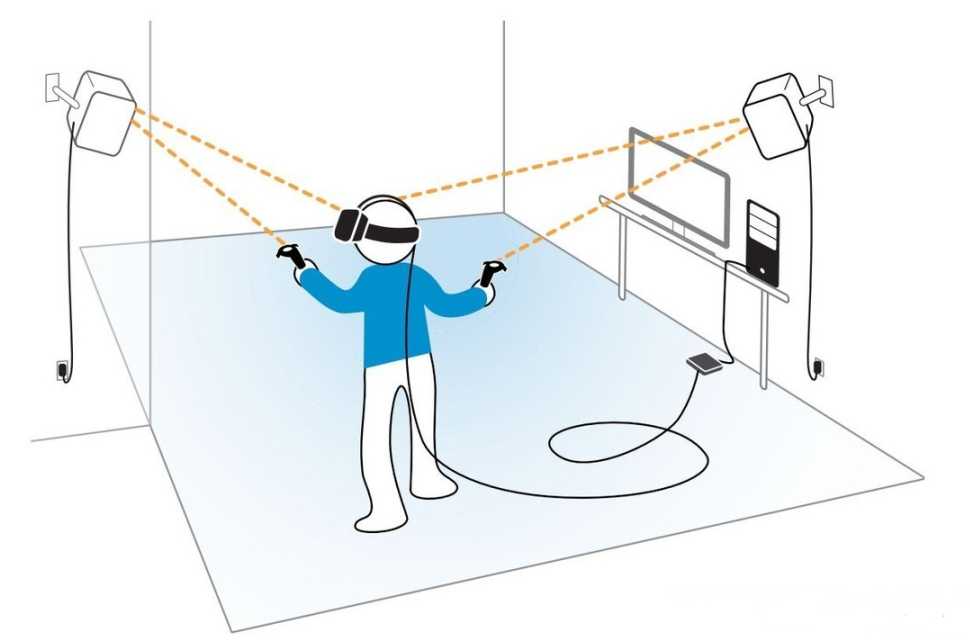
在這種方法中,將攝像機放置在環(huán)境中的固定位置,以跟蹤被跟蹤設(shè)備(例如頭戴式顯示器或控制器)上標記的位置。擁有多個攝像頭可實現(xiàn)同一標記的不同視圖,并且這種重疊可實現(xiàn)設(shè)備位置的準確讀取。例如 HTC Vive。每個外部 Lighthouse 模塊均包含IR LED以及在水平和垂直方向掃描的激光陣列,并且眼鏡和控制器上的傳感器可以檢測到這些掃描并使用時序來確定位置。該方法是最成熟的方法,不僅在VR中應(yīng)用,而且在電影的運動捕捉技術(shù)中都有應(yīng)用。但是,此解決方案空間有限,需要在設(shè)備的恒定視角下使用外部傳感器。
優(yōu)點:可以通過添加更多攝像頭來提高更準確的讀數(shù)。延遲比內(nèi)外跟蹤更低
缺點:遮擋,攝像機需要直接的視線,否則跟蹤將不起作用。需要外部傳感器意味著游戲空間有限
2.5.3 Inside-out
在這種方法中,將攝像機放置在被跟蹤設(shè)備上,并向外看以確定其在環(huán)境中的位置。使用該技術(shù)的眼鏡具有多個面向不同方向的攝像頭,以獲取其整個周圍環(huán)境的景象。此方法可以使用或不使用標記。
例如 微軟 HoloLens ,不需要在外部環(huán)境中安裝任何東西。它使用眼鏡上的攝像頭執(zhí)行以下過程 SLAM(無人機主要使用 VIO),或同時進行本地化和地圖繪制,其中實時生成環(huán)境的 3D 地圖。然后,機器學(xué)習(xí)算法使用特征檢測來重建和分析其周圍環(huán)境,從而確定眼鏡在該 3D 地圖中的位置。Oculus Quest、Google Tango、PICO都在研發(fā)自己 inside-out技術(shù)
優(yōu)點:提供更大的游戲空間,可以擴展到適合房間。適應(yīng)新環(huán)境
缺點:需要更多的車載處理。延遲可能會更高
參考文檔:
https://zhuanlan.zhihu.com/p/66731938
https://wikichi.icu/wiki/VR_positional_tracking
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753082 -
陀螺儀
+關(guān)注
關(guān)注
44文章
783瀏覽量
98667 -
攝像機
+關(guān)注
關(guān)注
3文章
1596瀏覽量
60016 -
vr
+關(guān)注
關(guān)注
34文章
9638瀏覽量
150213
發(fā)布評論請先 登錄
相關(guān)推薦
索尼新專利曝光!大幅提升PS VR追蹤性能
基于藍牙的位置追蹤服務(wù)解決方案

僅需580元!自制VR全身追蹤器 第二期 slimevr 全中文教程 高精度全身追蹤 owotrack-2
僅需580元!自制VR全身追蹤器 第二期 slimevr 全中文教程 高精度全身追蹤 owotrack-3





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論