 RH850/C1M-Ax MCU解決集成式雙牽引逆變器控制
RH850/C1M-Ax MCU解決集成式雙牽引逆變器控制
引言
最近,汽車電氣化趨勢加速了全球正在進行的向碳中和的轉變。xEV車輛的普及率與更嚴格的環境法規、核心技術創新、成本下降相伴而生。
幾乎世界上每個地區都在爭取更嚴格的環境法規,歐洲是其中的佼佼者,而其他地區的溫室氣體(GHG)標準正在緊隨其后。作為另一個影響因素,美國在現任新政府領導下被期望更嚴格的溫室氣體排放標準,這可能導致尤其是混合動力汽車的復蘇增長,因為這種車輛類別可以作為走向BEV過渡階段中的早期可用解決方案。溫和的混合動力汽車(48V系統)雖然有助于達到新的溫室氣體排放標準,但從OEM的角度來看,還不足以避免因不符合各自國家的CO排放法規而產生罰款。
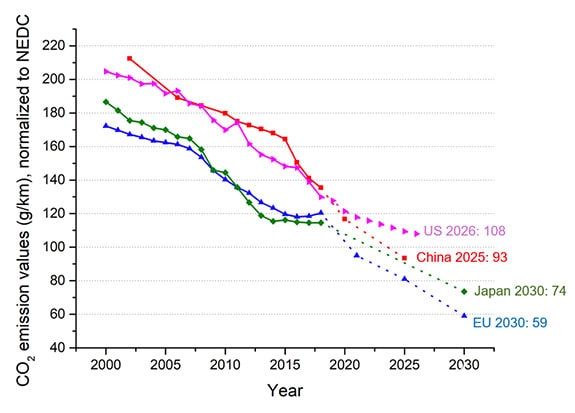
圖1:每個國家/地區的溫室氣體法規 (來源:ICCT, 2020)
隨著溫室氣體趨勢的加速,全球xEV市場可能進入漫長的擴張時期,電池成本也將下降。從2025年開始,更加嚴格的限制(燃油經濟性標準/BEV銷售法規)在各個國家將導致xEV的需求增長。隨后隨著核心技術(包括電池)的價格逐漸降低,從2025年開始向獨立增長模式過渡。
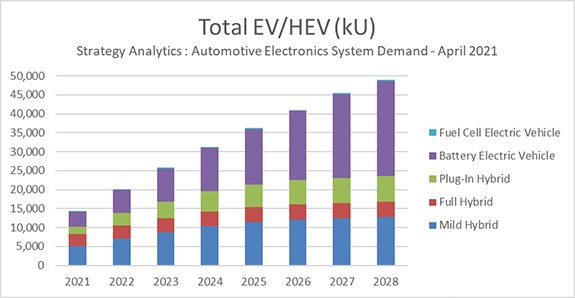
圖2:全球輕型車 xEV 市場需求預測(不包括 2/3 輪車、中/重型巴士和卡車等)來源:Strategy Analytics - Automotive Electronics System Demand - April 2021 -
HEV 系統的要求和概念
尤其是,PHEV和FHEV取決于各自的系統概念,從協作控制策略(ICE和電驅動)的角度來看,具有更高的復雜性,此外,由于ICE和電驅動器功能的組合/添加的原因,它們對應用程序組件的空間限制更為敏感。這不僅適用于機電組件,而且還適用于電子設備,例如數字芯片組,模擬和電源組件。
上述所描述的系統復雜性來自以下上層功能:在車輛減速時,動能通過電動機轉換為電能并存儲在電池中。在加速過程中,來自電池的電能用于輔助ICE,從而節省了燃油消耗。擁有高功率電動機的FHEV意味著高發電機容量,因此在減速期間可以回收(或恢復)更多的動能,從而使燃油效率提高百分之幾十。
HEV 控制: 復雜性的概念
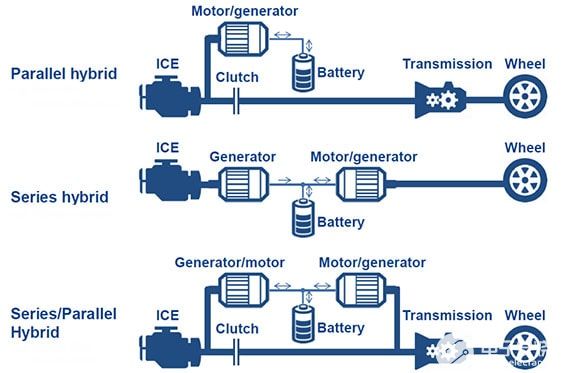
圖3:HEV 大分類
HEV有幾種混合體系結構,其中圖3描述了大分類。最簡單的是并聯混合系統 (Parallel hybrid system)。電機與ICE并聯放置。電動機/發電機通過利用來自電池的電能來輔助加速,并且在減速期間通過將電動機用作發電機來對電池進行充電。該系統的好處是成本更低,控制復雜度更低。
在串聯混合動力系統(Series Hybrid system)的情況下,由ICE產生的動能通過發電機轉換為電能,然后該電能被另一臺電動機再次用于產生動能。這看起來似乎在浪費成本和能量。但是,這種方法的優勢在于,它可以在最省油的速度/扭矩范圍內運行ICE。這是由于ICE在低速(例如《1500rpm),或者高速(例如》 4000rpm),還有低扭矩范圍的燃油效率很低。
串聯/并聯混合動力系統(Series/Parallel hybrid system)是最復雜的系統。當ICE在節油的速度/扭矩范圍內運行時,ICE的輸出可通過離合器和變速箱直接傳遞至車輪。如果需要扭矩輔助,則電動機可以協助加速,而ICE可以像并聯混合動力系統一樣節省燃料。當車速非常慢時,離合器會松開,這時系統的作用類似于串聯混合動力系統,以避免在低燃油效率范圍內運行ICE。
在串聯和串聯/并聯混合動力系統配置的情況下,通常需要一個嚴格且相互依賴地控制兩個電動機/發電機裝置的組合。
HEV 控制: 關鍵挑戰和解決方案
從前面介紹的牽引電機系統概念來看,很明顯,由于兩個實體之間的通信負荷很大,并且要加大診斷的力度去維護目標安全級別(ASIL-level),尤其是在串聯/并聯混合動力系統的情況下,各自的控制和同步工作趨向于復雜。
優化這些工作的一個顯而易見的解決方案是將兩個逆變器控制系統集成到一個ECU中,由一個高度專業化的微控制器(MCU)進行操作。 通過使用這種概念,可以在一個微控制器內實現兩個逆變器控制環路之間的同步,從而導致高通信帶寬和縮短等待時間。 此外,通過選擇符合安全級別ASIL的目標設備,診斷和功能安全概念將變得更加簡單和直接。 集成解決方案的另一個好處當然是高度優化的物料清單(BOM),同時減少了零件空間需求,這對于整個系統概念而言都是非常有益的效果。
解決方案: 具有集成xEV支持功能的MCU
HEV專用MCU的一項關鍵是將電機控制算法的矢量數學計算過程分流到專用處理IP上。 通過使用這種方法,MCU可以配備較少數量的CPU內核,同時承擔上述其他軟件任務。
增強型電機控制單元(EMU3)
嵌入式“增強型電機控制單元”(EMU Gen3)是一組單獨的電機控制加速器模塊,這些模塊使用矢量控制算法計算三相PWM比較值,并根據由A/D轉換器測得的電機電流值生成矩形波模式。 此外,通過執行位置傳感器接口功能的集成“解析器到數字轉換器”(RDC3A)獲得電機的角度值。 三相電機計時器TSG3使用EMU3的計算結果來輸出PWM和矩形波。
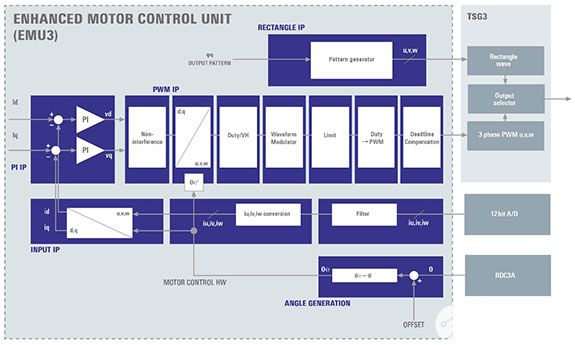
圖4:增強型電機控制單元(EMU3)
EMU3 的IP可以結合其特定功能塊和用戶特定軟件干預來行使電動機控制功能。 因此,可以實現結合了硬件加速和各個用戶軟件的靈活控制概念。
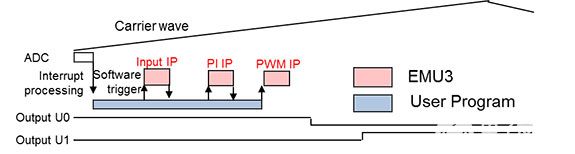
圖5:結合用戶特定的軟件干預實現電機的靈活控制
雙電動機/發電機控制
實現雙電動機/發電機控制能力的關鍵解決方案是基于先前介紹的電動機控制IP(“ EMU3”)以及嵌入式位置傳感器接口如何集成到微控制器系統中。
下圖顯示了控制兩個電動機的實際方法(請參閱附錄中的縮寫定義):
CPU2和CPU3分別控制一臺電動機。通過使用EMU3,性能密集型電機控制算法(例如用于產生PWM模式的Park / Clark變換)的處理已從CPU轉移到EMU3。這允許其他重要軟件任務(例如診斷處理)由CPU執行。
CPU1還可用于其他功能:例如,實現DC/DC轉換器控制作為可選用的集成附加功能,以優化整個HEV系統布局。
RDC3A是MCU集成的(與Tamagawa AU6805等效)雙旋轉變壓器數字轉換器接口,或更概括地說,是電動機位置傳感器接口,能夠連接到模擬旋轉變壓器或電感式位置傳感器信號。
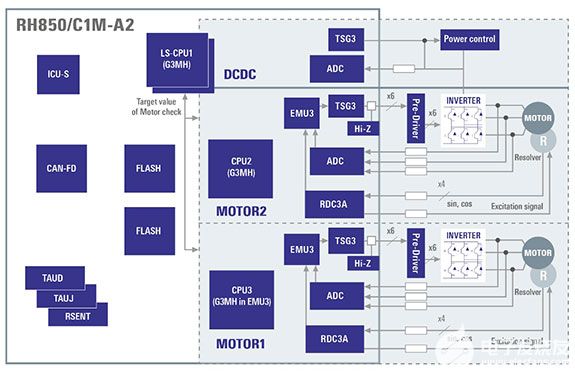
圖6:控制雙電動機/發電機的系統示例
瑞薩提供的解決方案
在瑞薩(Renesas),40納米微控制器RH850/C1M-Ax作為HEV控制概念已經過多年驗證。 該器件以及即將發布的28nm下一代器件,專注于牽引電機的逆變器控制功能。 合適的PMICs,柵極驅動器和IGBT器件以及逆變器turnkey解決方案可以極大的減少客戶的研發工作(見圖7)。
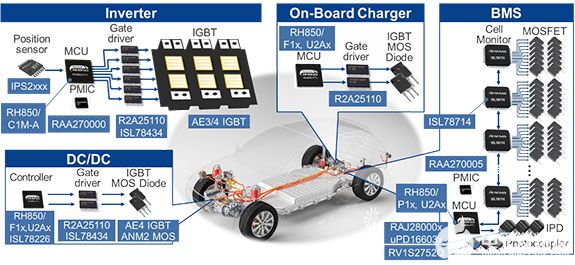
圖7:瑞薩xEV產品組合
總結
基于電驅動/ICE系統組合運行的混合動力汽車由于系統復雜性的增加,特別需要經濟高效且尺寸優化的推進系統。 牽引逆變器專用的高性能微控制器(MCU)帶有專用的用于矢量數學計算的硬件加速器功能,可幫助實現整體優化的電子和機電系統設計。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7557瀏覽量
151447 -
驅動器
+關注
關注
52文章
8241瀏覽量
146399 -
逆變器
+關注
關注
284文章
4723瀏覽量
206874
發布評論請先 登錄
相關推薦
使用UCC14341EVM-069為需要正向單輔助電源或正/負雙輔助電源的牽引逆變器柵極驅動器IC供電

使用ADS795x-Q1對HEV和EV牽引逆變器系統進行溫度監控
在單個C2000?MCU上使用FCL和SFRA進行雙軸電機控制
使用隔離式 IGBT 和 SiC 柵極驅動器的 HEV/EV 牽引逆變器設計指南
在汽車SiC牽引逆變器中使用Sitara MCU AM263x
瑞薩RH850啟動時間加快解決方案
如何使用瑞薩RH850-F1KS4 Smart Configurator配置外設呢?

適用于e2 studio 2024-01 RH850插件的智能配置程序發布說明
RL78系列、RX系列、RH850系列集成開發環境用戶手冊
RH850系列CS V8.11.00 集成開發環境應用介紹





 工商網監
工商網監
評論