") FANUC機器人多種PLC之間通信方式
FANUC機器人多種PLC之間通信方式
1、發(fā)那科工業(yè)機器人通常可以實現(xiàn)的與多種PLC之間通信方式有
(1)ProfiNET通信
(2)Profibus DP通信
(3)CC-LINK通信
(4)Ethernet/IP通信
(5)DeviceNET通信
2、以太網(wǎng)通信
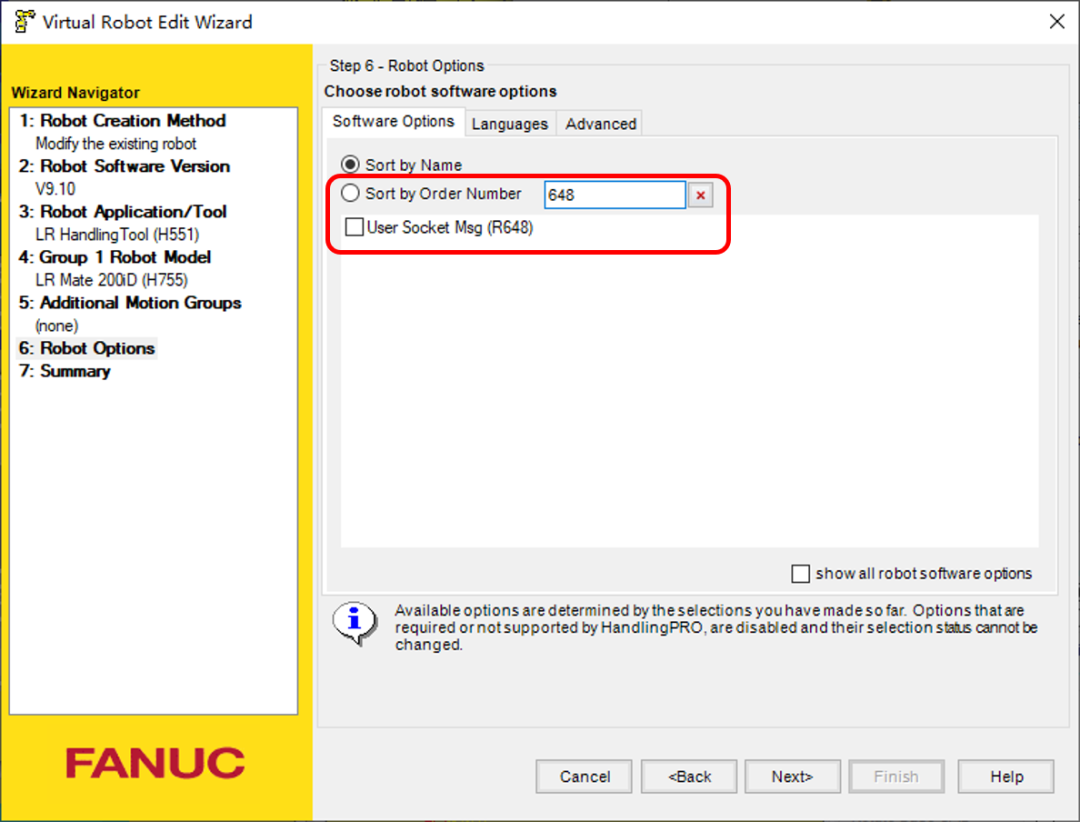
Step One:安裝軟件包
安裝UserSocket Msg(R648)軟件包,光有KAREL不行,一定要安裝這個軟件包,否則是無法實現(xiàn)SOCKET通信的。
Step Two:檢查通信
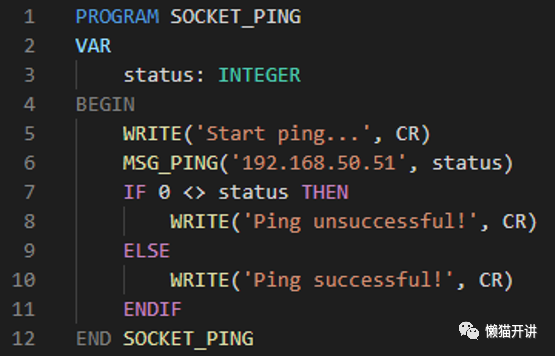
MSG_PING(string, integer)
在程序中測試是否可以連接服務(wù)器時可使用MSG_PING函數(shù),該內(nèi)建函數(shù)用于檢測與遠程主機是否可網(wǎng)絡(luò)通信,使用該函數(shù)后,工業(yè)機器人以太網(wǎng)通信端口將發(fā)送ping數(shù)據(jù)包并等待返回,若無返回,則表示無法連接對方設(shè)備。 該函數(shù)有兩個形參,第一個形參是字符串參數(shù),用于設(shè)置所連接的對象主機,第二個參數(shù)是整型參數(shù),返回當前函數(shù)的執(zhí)行狀態(tài),若不為0則代表有錯誤發(fā)生。 Step Three:建立TCP隧道
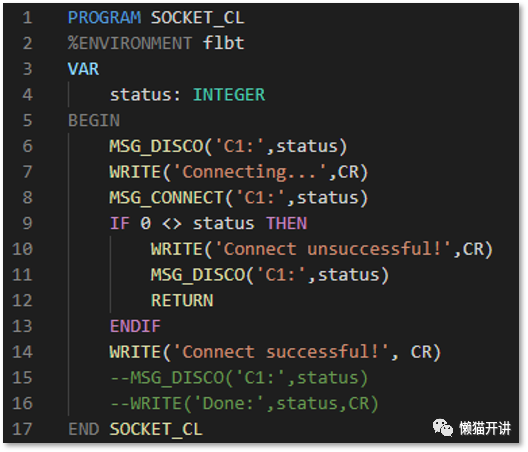
MSG_CONNECT(string, integer)
該函數(shù)就是用于建立TCP通信隧道,對于服務(wù)器標簽和客戶端標簽其執(zhí)行方式是不一樣的,若該函數(shù)用于主機標簽通信,則只有當有客戶端連接上時才會有返回值,否則一直等待。若用于客戶端標簽通信,則只要對方服務(wù)器允許連接則輸出返回值,程序繼續(xù)執(zhí)行。 Step Four:文件讀寫
與其他所有高級語言實現(xiàn)SOCKET通信方式一樣,建立連接之后就是對文件進行讀寫,此處可以參考之前我們課程中關(guān)于日志讀寫的部分,但是需要注意是以交互方式打開文件,否則通信是無法成功的。 Step Five:關(guān)閉隧道
MSG_ DISCO (string, integer)
該函數(shù)用于關(guān)閉TCP通信隧道。在嘗試任何連接前,建議先用MSG_DISCO內(nèi)建函數(shù)嘗試關(guān)閉標簽可能已建立的通信隧道,也就是說無論是否之前已經(jīng)建立了連接,當你需要連接的時候都需要先調(diào)用這個函數(shù)。同時當需關(guān)閉或丟失通信連接時都需要關(guān)閉通信隧道,以避免內(nèi)存泄露,也就是說一旦建立其通信隧道,則只要機器人系統(tǒng)不重啟,則已經(jīng)建立的連接就會一直保持,無論當前運行的是TP還是其他的PC程序。 3、FANUC機器人網(wǎng)絡(luò)通訊RACK號 Rack: 0 process I/O boards (also memory image)
16 AB or Genius I/O
32 Slave SLC2 I/O
33 internal relay/register
34 flag marker
35 always on/off port Slot 0 = OFF Slot 1 = ON
36 DCS port
48 address mapped I/O for LR Mate Peripheral connectors
64 ME-NET
65 INTERBUS-S
66 PROFIBUS DP master
67 PROFIBUS DP slave
68 FL-net
69 FL-net status
70 InterBus-S master
71 InterBus-S slave
72 IO-LINK II master
73 IO-LINK II slave
74 FIPIO master PSA
75 FIPIO slave PSA
81 first DeviceNet board CAPSA/SGM
82 Used by DeviceNet CAPSA/SGM
83 Used by DeviceNet
84 Used by DeviceNet
85 controlnet; also used 86
86 Used by ControlNet
87 RoboWeld
88 Ethernet Global Data (GE-EGD I/O)
89 EthernetIP (ControlNet over ethernet) I/O SGM
90 Arclink Rack Number
91 WTC Serial Weld Controller I/O
92 CC-Link RD
93 InterBus PxC PCI master
94 InterBus PxC PCI slave
95 InterBus PxC PCI cmd
96 Modbus TCP
97 TOYOPUC PC3J Interface
98 InterBus PxC Slave interface
99 PROFINET I/O Controller CP1604/CP1616 DF-Renault
100 PROFINET I/O Device CP1604/CP1616 DF-Renault
101 Dual Channel Profinet I/O Controller V9 RS834通訊板卡 WM
102 Dual Channel Profinet I/O Device V9 RS834通訊板卡 WM
106 EtherCat
4、FANUC機器人視覺功能
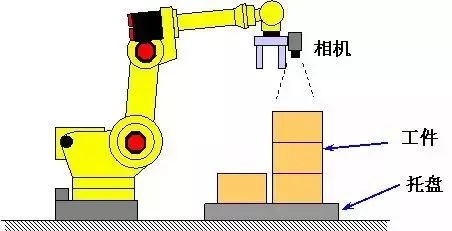
3D視覺應用 發(fā)那科
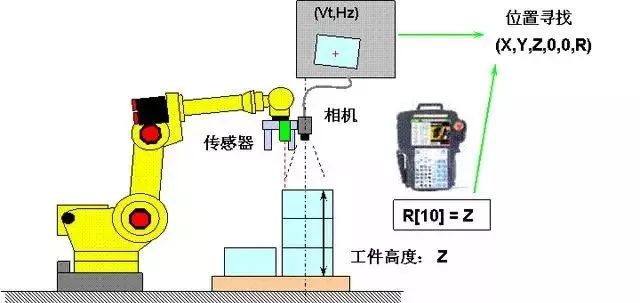
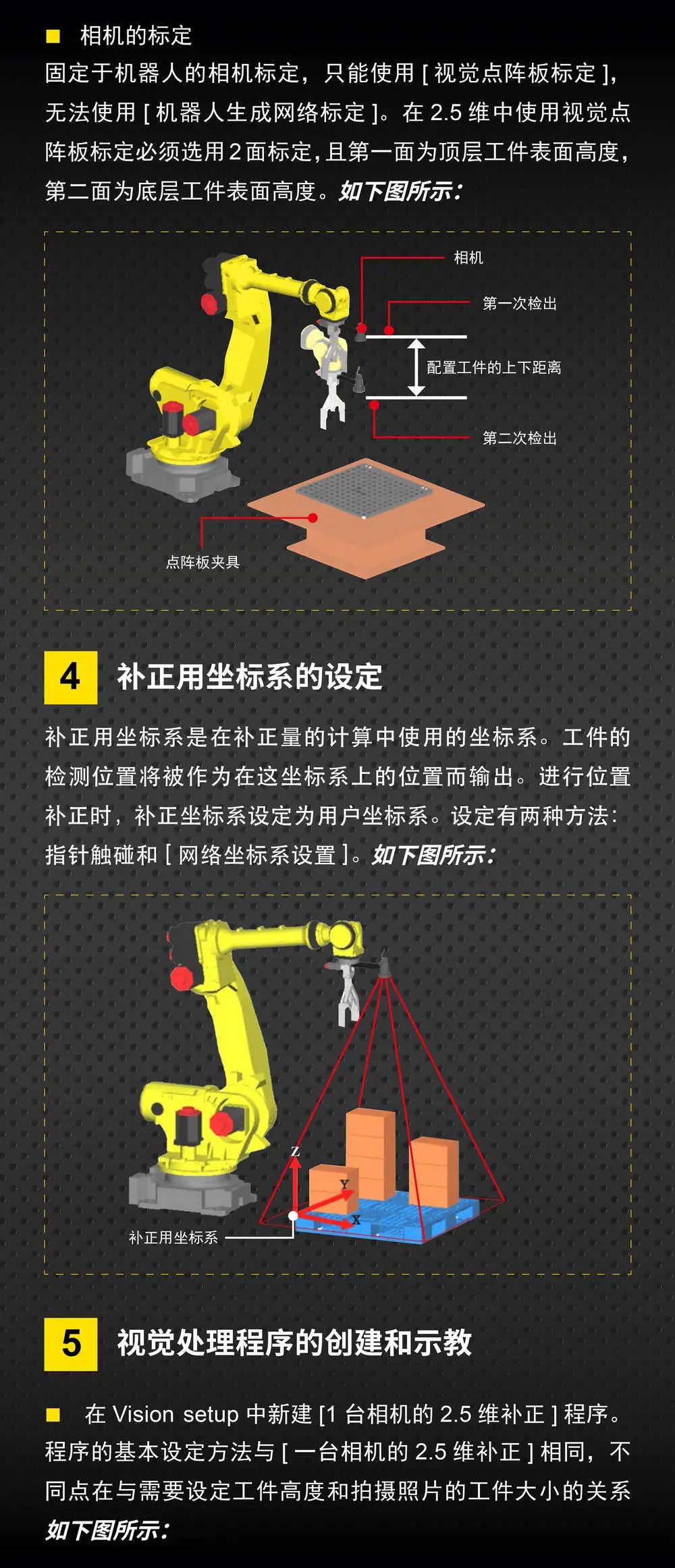
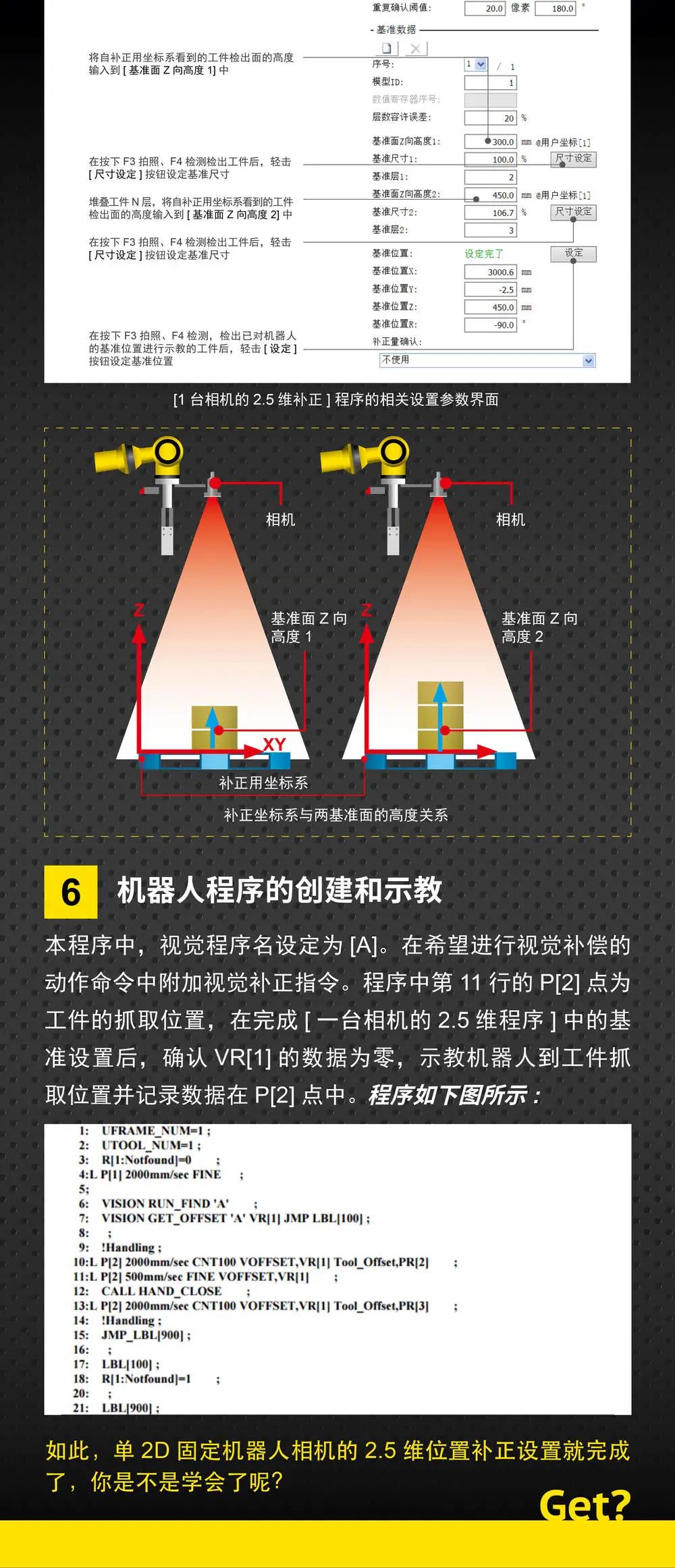
iRVision 2.5D 視覺堆垛
視覺堆垛程序通過相機視野內(nèi)目標比例的變化來估算目標的高度并引導機器人的運動補償目標的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時包括Z軸。 使用iRVision 2.5D允許機器人只借助一個普通2D相機來拾取碼放堆集的目標。
iRVision 視覺堆垛程序_1
(從寄存器R提取Z軸偏移)
通過視覺計算尋找目標的2D位置和指定的寄存器數(shù)值,并引導機器人的運動補償目標的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時包括Z軸。
寄存器R被用作存儲已知的目標Z軸高度,或者通過距離傳感器檢測出的Z軸高度信息。
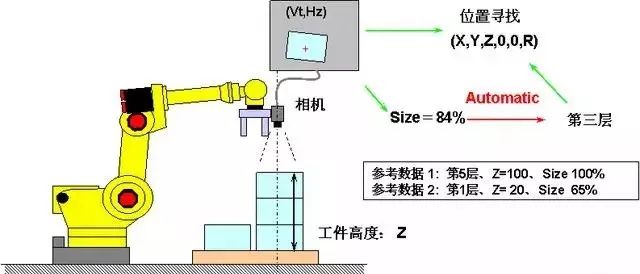
iRVision 視覺堆垛程序_2
(從堆垛層數(shù)提取Z軸偏移)
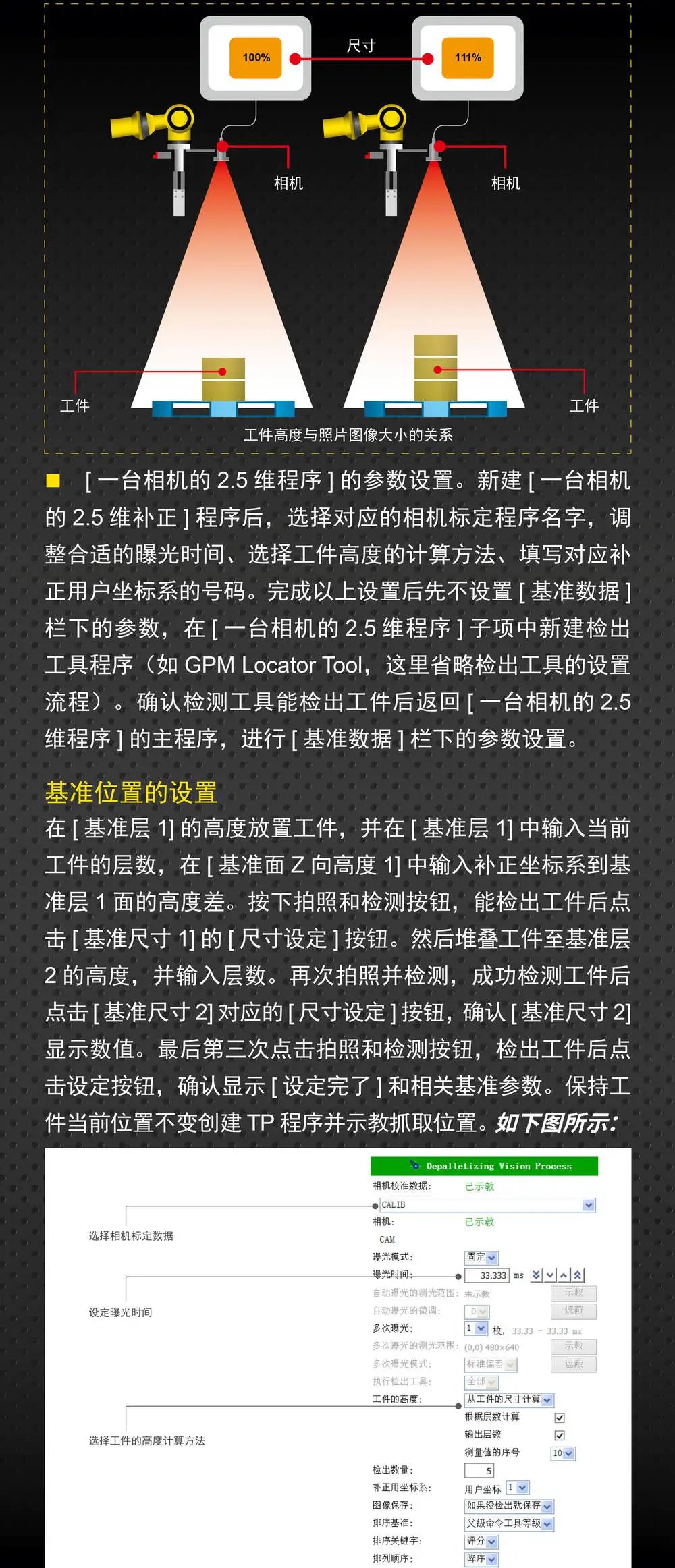
此功能通過視覺結(jié)合視覺檢測結(jié)果和根據(jù)目標比例確定的目標層數(shù)(目標高度)計算目標的位置。目標層數(shù)依照參考比例和高度數(shù)據(jù)自動確定,因而,即使在視覺檢測中存在細微的比例誤差,也可以通過一個離散的層數(shù)(目標高度)來計算目標的具體位置。
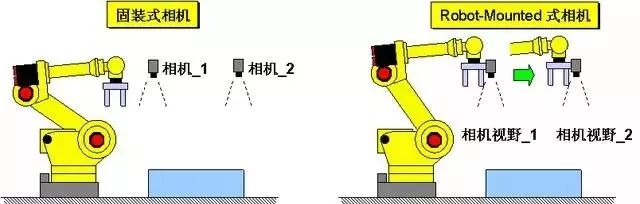
iRVision 2DV 復數(shù)視野功能
2D復數(shù)視野程序提供通過若干固裝式照相機定位大型目標的能力,對通過Robot-Mounted式照相機進行檢測同樣有效。
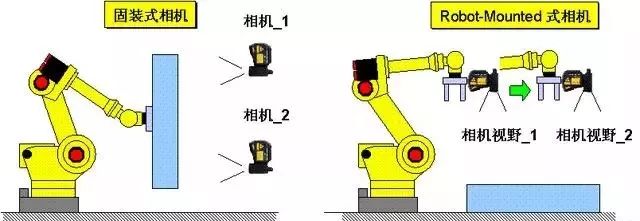
iRVision 3DL 復數(shù)視野功能
3D復數(shù)視野程序提供通過若干固裝式3D照相機定位大型目標的能力,對通過Robot-Mounted式照相機進行檢測同樣有效。
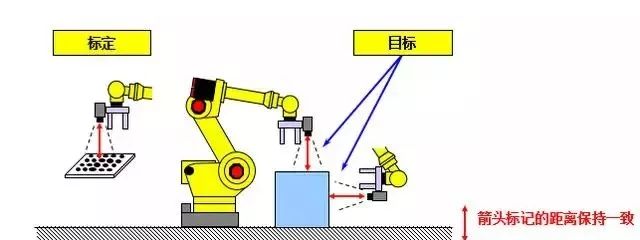
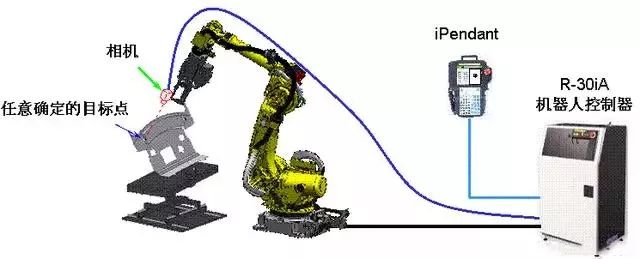
iRVision 浮動坐標系功能
(Floating Frame)
Robot-mounted 式照相機的標定可以用于如下圖所示任意位置和方向下的iRVision程序。2D狀態(tài)下的移動補償與照相機實際位置相關(guān)聯(lián)。照相機的標定可以在任意位置下進行。減少示教工作量。
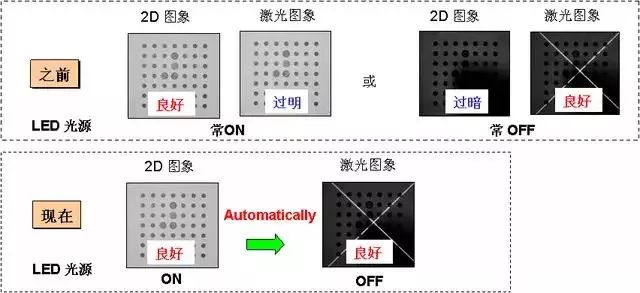
iRVision 3DL LED 光源控制
此功能支持在3DL視覺程序中,在捕獲2D圖象和激光照射圖象時,同步控制LED光源的ON/OFF。通過此功能,可以獲得適當?shù)耐獠抗饩€環(huán)境,提升整個視覺系統(tǒng)的能力。
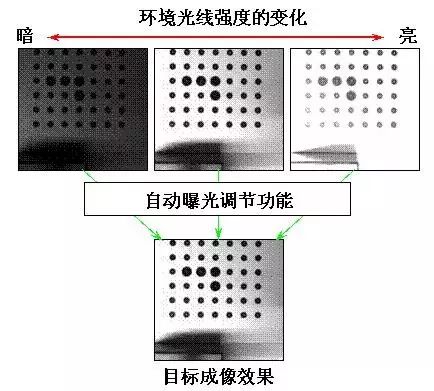
iRVision 自動曝光功能
根據(jù)周圍環(huán)境光線強度的變化,iRVision將自動調(diào)節(jié)曝光時間,以取得和示教良好圖象類似的成像效果,全天候運行可能。
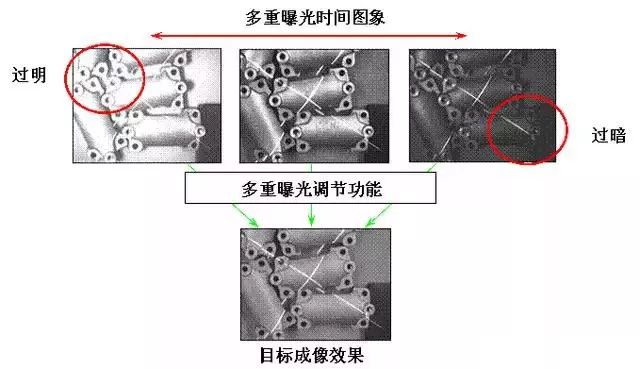
iRVision 多重曝光功能
通過多個不同曝光時間的成像,選擇一個接近示教效果的成像,以取得一個具有寬泛的、動態(tài)的曝光范圍和成像效果。此功能在環(huán)境光線變化強烈時會有較好的效果。
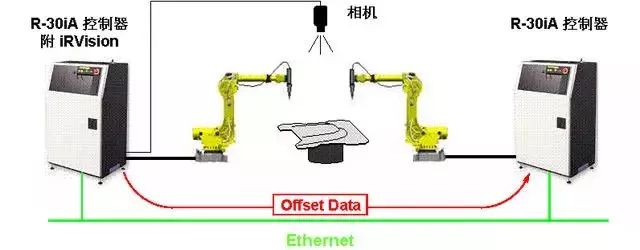
iRVision 環(huán)形網(wǎng)絡(luò)功能
(Robot Ring)
通過此功能,未附有 iRVision 視覺系統(tǒng)的機器人可以通過網(wǎng)絡(luò)調(diào)用附有 iRVision 視覺系統(tǒng)的機器人的偏移檢測數(shù)據(jù)。
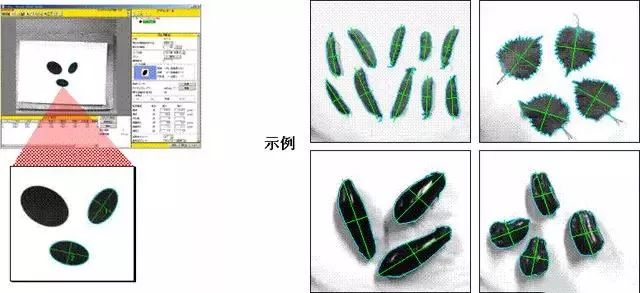
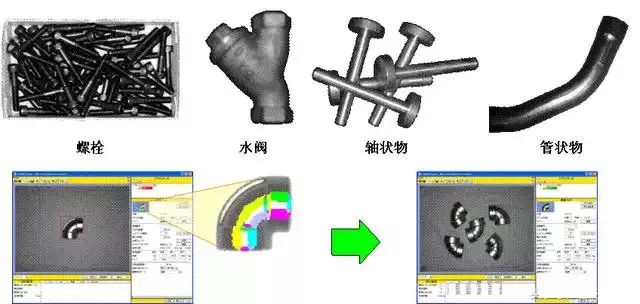
iRVision 斑點檢測功能
(Blob Locator Tool)
在成像范圍內(nèi)檢測與示教模型具有相似特性(如周長、曲率等)的二元(黑白)目標位置。與條件檢測(Conditional execution tool)同時使用,可以應用于目標排列和品質(zhì)檢測等多種場合。
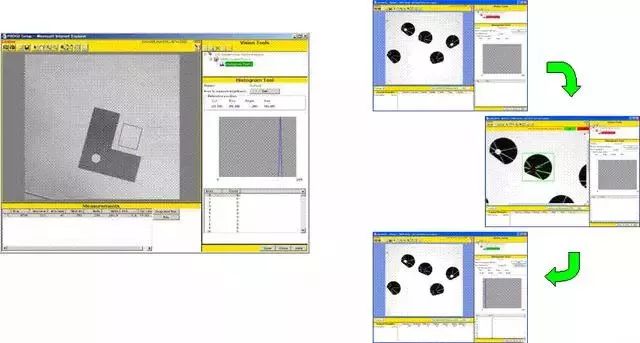
iRVision 灰度檢測功能
(Histogram Tool)
在指定區(qū)域內(nèi)檢測光線強度(成像灰度),且計算多種特性例如平均數(shù)、最大值、最小值等。與條件檢測(Conditional execution tool)同時使用,可以對應目標排列和目標在位檢測等多種場合。 此功能等同 V-500iA/2DV 中 Associate tool。
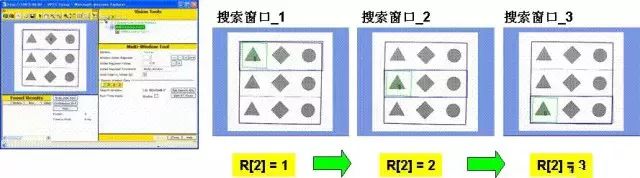
iRVision 多窗口檢測功能
(Multi-Window Tool
通過機器人控制器內(nèi)寄存器R的數(shù)值變化切換對應的預設(shè)搜索窗口。
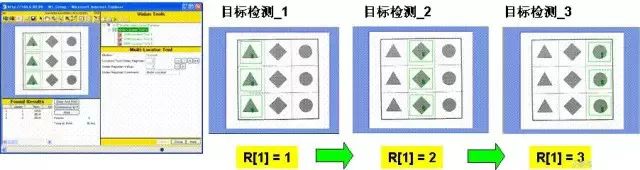
iRVision 多目標檢測功能
(Multi-Locator Tool)
通過機器人控制器內(nèi)寄存器R的數(shù)值變化切換對應的預設(shè)目標視覺程序。
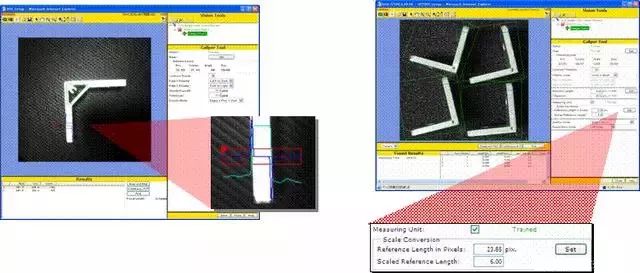
iRVision 長度計測功能
(Caliper Tool)
對應指定區(qū)域,偵測目標邊緣并測量兩條邊緣間長度(單位:像素pixel),乘以轉(zhuǎn)換因子可以換算為mm。可以對應目標排列及品質(zhì)檢測等應用場合。
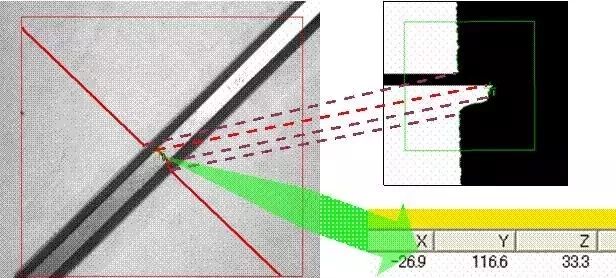
iRVision 截面檢測功能
(Cross Section)
偵測目標的局部3D特性,顯示沿激光衍條照射路徑上的目標截面形狀。對在3D視覺程序中因2D成像缺乏有效的特征量而無法進行準確定位時會比較有效。
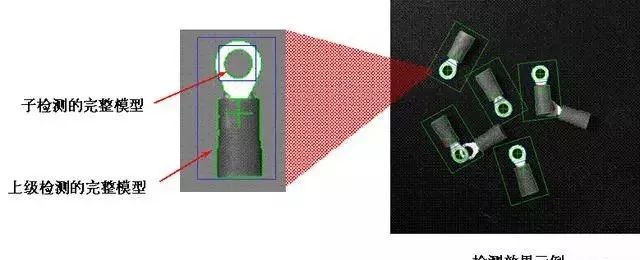
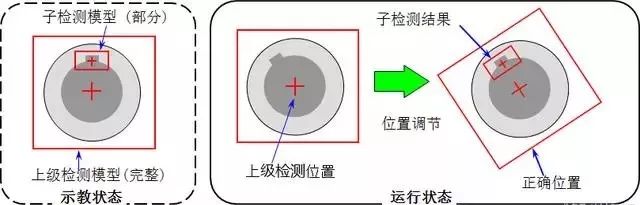
iRVision 子檢測功能
(Child Tool)
允許在一個父目標檢測(GPM locator tool)下添加一個子目標檢測(GPM locator tool)構(gòu)成二級檢測目錄。子檢測將根據(jù)父檢測的結(jié)果進行動態(tài)的判定。與條件檢測(Conditional execution tool)同時使用,可以對應目標排列和目標在位檢測等多種場合。
iRVision 定位調(diào)整功能
(Position Adjust Tool)
依據(jù)子檢測的結(jié)果,對應目標表面明顯特征(如孔,鍵槽)調(diào)整父檢測的定位位置,獲得更精確的偏移和旋轉(zhuǎn)數(shù)據(jù)。對不能以整個示教模型進行方向性定位的應用較有效。對一個上級檢測,可以使用多個下級子檢測來分析目標的多種局部特性。
iRVision 曲面匹配功能
(Curved Surface Matching Tool)
通過目標表面階梯狀的光線強度分布(亮或暗,模型內(nèi)顯示為不同顏色)來檢測曲面目標的偏移與旋轉(zhuǎn)。識別全圓形物體可能。
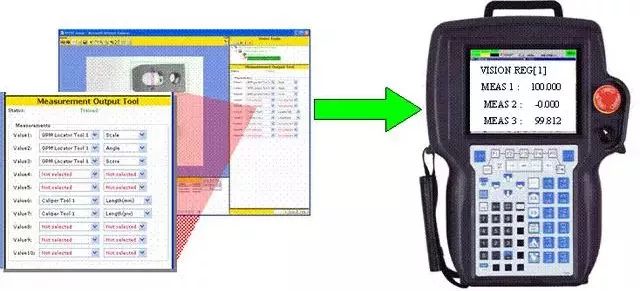
iRVision 計測輸出功能
(Measurement Output Tool)
輸出測量數(shù)值(Locator tool中的”Score/分值“、”Size/比例“,Caliper tool中的”Length/長度“等)至視覺寄存器VR。這些數(shù)據(jù)可以復制至機器人數(shù)據(jù)寄存器R并在TP程序中自由調(diào)用。
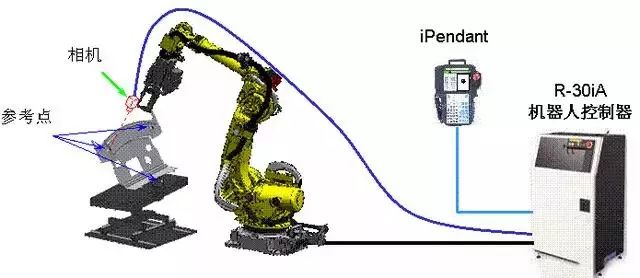
iRVision 視覺替換功能
( Vision Shift)
通過視覺程序調(diào)整機器人TP程序以對應實際的工件位置,只需在機器人手爪端添加一臺相機即可執(zhí)行此功能。固定工件上的3處任意的參考點的位置數(shù)據(jù)將被自動檢測并計算出補償數(shù)據(jù)。在離線編程或機器人系統(tǒng)搬遷后,使用此功能可極大減少機器人重新示教的時間。
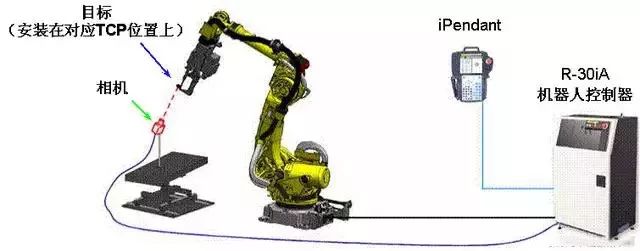
iRVision 視覺零位功能
( Vision Mastering)
通過視覺程序補償機器人J2~J5軸的零位數(shù)據(jù),只需在機器人手爪端添加一臺相機即可執(zhí)行此功能。機器人變換不同的姿態(tài),相機與確定目標點間的相對位置數(shù)據(jù)將被自動檢測并計算補償數(shù)據(jù)。此功能可應用于提升機器人TCP示教準確性,Vision shift 離線編程和其他視覺應用。
iRVision 視覺坐標系設(shè)置功能_1
( Vision Frame Set)
通過視覺程序設(shè)置機器人TCP,只需在機器人手爪端TCP對應位置添加一臺相機即可執(zhí)行此功能。機器人變換不同的姿態(tài),基于對應用戶坐標系下相機與目標點間的相對位置數(shù)據(jù)將被自動檢測并計算機器人對應TCP。此功能可提升TCP示教的速度和精確性。
iRVision 視覺坐標系設(shè)置功能_2
( Vision Frame Set)
坐標系設(shè)置的另一種功能:通過視覺設(shè)置一個與視覺標定板對等的用戶坐標系。通過裝置在機器人手爪末端的相機,用戶坐標系UF設(shè)置在視覺標定板的原點位置(四點法),或當視覺標定板裝置在機器人手爪末端,則工具坐標系UT設(shè)置在視覺標定板的原點位置(六點法)。 5、智能工廠對機器視覺需求 機器視覺在智能工廠中扮演著重要的角色,可以有效增加產(chǎn)能、提升產(chǎn)品合格率。 在選擇機器視覺系統(tǒng)時,傳統(tǒng)工業(yè)智能視覺設(shè)備的優(yōu)勢是體積小、集成度高、便于開發(fā)使用;嵌入式機器視覺系統(tǒng)的優(yōu)勢則在于其配置的彈性特征,具備較高的拓展性。在智能工廠的建設(shè)過程中,對機器視覺系統(tǒng)的要求是,既要降低成本,還要滿足快速變化的視覺應用需求。 智能工廠對機器視覺有啥需求? 性能與處理能力。如何提升產(chǎn)能,系統(tǒng)性能與處理能力(throughput)扮演著關(guān)鍵的角色。就一般機器視覺系統(tǒng)而言,高分辨率與高幀率(每秒顯示幀數(shù))就像魚與熊掌一樣,不可兼得。在一般實際的應用中,通常是高分辨率但低幀率或低分辨率但高幀率的應用組合。如果想要兩者兼得,惟一的出路就是使用高端CPU處理器來補足分辨率與幀率加乘出來的結(jié)果。如何以合理的成本,取得最佳的處理性能,是系統(tǒng)開發(fā)人員所關(guān)心的。 產(chǎn)線環(huán)境。工廠的環(huán)境通常是較為惡劣的,例如在飲料生產(chǎn)包裝的產(chǎn)線,系統(tǒng)可能會直接接觸到液體。而在工具機加工的環(huán)境中,則是充滿切削工件的惡劣環(huán)境。如果機器視覺系統(tǒng)必須就近配置在嚴苛的產(chǎn)線環(huán)境中,那么選擇具備防水、防塵能力的產(chǎn)品才能達到該需求。 多組生產(chǎn)工作站。在工廠環(huán)境中,一個成品的上市,從組件的制造、半成品的取放、質(zhì)量的檢驗到出貨的包裝,必須要經(jīng)過層層不同的工作站。舉例來說,CNC機臺負責組件的車削加工,通過工業(yè)機器人的取件,通過工業(yè)相機讓工件定位后,才開始進行工件的切割;完成后進入到檢測的站臺,進行缺陷檢測;過關(guān)的成品在包裝區(qū)進行出貨條形碼的掃讀。多組生產(chǎn)工作站之間,如何讓系統(tǒng)之間容易整合與溝通,是工廠是否智能化的一大關(guān)鍵。 軟件開發(fā)環(huán)境。軟件解決方案開發(fā)的難易度與整合度,是所有導入智能化系統(tǒng)的工程人員心中的一大擔憂,也往往是決定項目成敗的最重要因素。如何縮短開發(fā)時間,降低系統(tǒng)開發(fā)成本,是重要的關(guān)鍵。 我國機器視覺發(fā)展現(xiàn)狀 我國機器視覺行業(yè)的起步比較晚,集中度也不是很高,最開始主要是代理國外品牌。近幾年,很多的經(jīng)銷商開始自主開發(fā)產(chǎn)品,但在行業(yè)分布、渠道分銷以及成熟的自動化產(chǎn)品等方面還是和國外有一定差距。國內(nèi)機器視覺的相對成熟的自動化產(chǎn)品質(zhì)量以及技術(shù)含量偏低,市場也遠遠沒有飽和。 機器視覺企業(yè)大體可以分為層開發(fā)廠商、二次開發(fā)廠商和產(chǎn)品代理商。國內(nèi)機器視覺企業(yè)主要為國外機器視覺產(chǎn)品代理商和系統(tǒng)二次開發(fā)廠商。目前進入我國機器視覺市場的國外品牌有100多家,我國本土的企業(yè)負責銷售代理的企業(yè)有200多家,專業(yè)的系統(tǒng)集成商超過50家。我國真正的專業(yè)機器視覺底層廠商鳳毛麟角,本土機器視覺系統(tǒng)廠商和機器視覺系統(tǒng)元器件生產(chǎn)商存在缺失。 我國機器視覺的發(fā)展趨勢 工業(yè)4.0離不開智能制造,智能制造離不開機器視覺。機器視覺是實現(xiàn)工業(yè)自動化和智能化的必要手段,相當于人類視覺在機器上的延伸。機器視覺具有高度自動化、高效率、高精度和適應較差環(huán)境等優(yōu)點,將在我國工業(yè)自動化的實現(xiàn)過程中產(chǎn)生重要作用。 視覺圖像技術(shù)需要重點構(gòu)建四大核心能力: 第一,智能識別。海量信息快速收斂,從大量信息中找到關(guān)鍵特征,準確度和可靠度是關(guān)鍵。 第二,智能測量。測量是工業(yè)的基礎(chǔ),要求精準度。 第三,智能檢測。在測量的基礎(chǔ)上,綜合分析判斷多信息多指標,關(guān)鍵點上是基于復雜邏輯的智能化判斷。 第四,智能互聯(lián)。圖像的海量數(shù)據(jù)在多節(jié)點采集互聯(lián),同時將人員、設(shè)備、生產(chǎn)物資、環(huán)境、工藝等等數(shù)據(jù)互聯(lián),衍生出深度學習、智能優(yōu)化、智能預測等等創(chuàng)新能力,真正展示出工業(yè)4.0的威力。 機器視覺的相關(guān)產(chǎn)品 一個典型的工業(yè)機器視覺系統(tǒng)包括:光源、鏡頭、相機(包括CCD相機和COMS相機)、圖像處理單元(或圖像捕獲卡)、圖像處理軟件、監(jiān)視器、通訊/輸入輸出單元等。 (一)機器視覺核心部件: 智能相機:黑白智能相機、線掃描智能相機、彩色智能相機、CMOS智能相機、ID讀碼器等; 板卡:黑白采集卡、圖像壓縮/解壓板卡、彩色采集卡等; 軟件包:圖像處理軟件、機器視覺工具軟件; 配件:工業(yè)相機、CMOS相機、CCD相機、面陣相機、行掃描相機、紅外相機、1394接口相機; 工業(yè)鏡頭:FA鏡頭、高分辨率鏡頭、圖像掃描鏡頭、聚光透鏡、遠心鏡頭等; 光源:LED光源、紫外照明系統(tǒng)、紅外光源、光纖照明系統(tǒng)等; 輔助產(chǎn)品:傳感器、標定塊、光柵、墊圈、連線及連接器、電源、底板。 (二)機器視覺輔件: 圖像處理系統(tǒng):光學文字、識別系統(tǒng)、自動化/機器人技術(shù)、紅外圖像系統(tǒng); 機器視覺集成:字符處理和識別系統(tǒng)、自動化/機器人技術(shù)、紅外圖像系統(tǒng)、煙草、印鈔、電子組裝、質(zhì)量檢測、自動識別(OCR/OCV)、測量、智能視覺、表面檢測、印刷、包裝、復雜工業(yè)對象視覺在線、汽車制造、車牌、智能交通、生物特征識別、監(jiān)控、醫(yī)療檢測、光學檢查等系統(tǒng)。 由于機器視覺系統(tǒng)可以快速獲取大量信息,而且易于自動處理,也易于同設(shè)計信息以及加工控制信息集成,因此,在現(xiàn)代自動化生產(chǎn)過程中,人們將機器視覺系統(tǒng)廣泛地用于工況監(jiān)視、成品檢驗和質(zhì)量控制等領(lǐng)域。 但是機器視覺技術(shù)比較復雜,最大的困難在于人的視覺機制尚不清楚。人可以用內(nèi)省法描述對某一問題的解題過程,從而用計算機加以模擬。但盡管每一個正常人都是“視覺專家”,卻不可能用內(nèi)省法來描述自己的視覺過程。因此建立機器視覺系統(tǒng)是十分困難的任務(wù)。 可以預計的是,隨著機器視覺技術(shù)自身的成熟和發(fā)展,它將在現(xiàn)代和未來制造企業(yè)中得到越來越廣泛的應用。
6、FANUC 位置補正設(shè)置
FANUC.ROBOT

審核編輯 :李倩
-
機器人
+關(guān)注
關(guān)注
211文章
28565瀏覽量
207712 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5452瀏覽量
172187 -
通信
+關(guān)注
關(guān)注
18文章
6049瀏覽量
136220
原文標題:硬菜!FANUC機器人通信
文章出處:【微信號:AMTBBS,微信公眾號:世界先進制造技術(shù)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
EtherNetIP轉(zhuǎn)Profinet網(wǎng)關(guān)連接發(fā)那科機器人配置實例解析

PLC多種通訊方式匯總學習~

工業(yè)機器人控制方式有幾種
工業(yè)機器人常用的編程方式
六軸焊接機器人多久檢修一次
ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
工業(yè)機器人、PLC與自動化之間的關(guān)系
ABB機器人與西門子PLC的Profinet通訊設(shè)置
PLC與機器人之間如何通訊
如何使用PLC控制機器人
PLC與PLC之間如何通訊
PLC連接電腦的多種方式
西門子PLC與FANUC機器人如何實現(xiàn)EtherNet/IP通信






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論