") 點(diǎn)云數(shù)據(jù)的方位角歸一化方法
點(diǎn)云數(shù)據(jù)的方位角歸一化方法
摘要:點(diǎn)云感知算法是安全魯棒的自動(dòng)駕駛系統(tǒng)中尤為重要的一環(huán)。在CVPR 2022上,地平線-華中科技大學(xué)計(jì)算機(jī)視覺聯(lián)合實(shí)驗(yàn)室發(fā)表了研究成果Azimuth Normalization——以點(diǎn)云特有的徑向?qū)ΨQ性作為先驗(yàn),對(duì)數(shù)據(jù)歸一化,降低從點(diǎn)云中獲取信息的難度。該歸一化方法能與大多數(shù)感知算法結(jié)合,降低對(duì)訓(xùn)練數(shù)據(jù)的需求并提升性能上限,在三維場(chǎng)景感知中有著廣泛的應(yīng)用價(jià)值。
簡(jiǎn)介
從機(jī)器學(xué)習(xí)的角度考慮,數(shù)據(jù)中隱含的對(duì)稱性能夠作為算法的歸納偏置(inductive bias),對(duì)于提升算法精度有很大的幫助。點(diǎn)云是三維場(chǎng)景理解中最重要的表示形式,本工作討論了點(diǎn)云數(shù)據(jù)特有的徑向?qū)ΨQ性(Radial Symmetry),并提出了針對(duì)點(diǎn)云數(shù)據(jù)的方位角歸一化方法(Azimuth Normalization / AziNorm)。Azimuth Normalization采用了一種分而治之(Divide-and-conquer)的策略,靈活地分解全場(chǎng)景點(diǎn)云并在子點(diǎn)云上進(jìn)行歸一化。歸一化后的子點(diǎn)云具有更簡(jiǎn)單的模式(pattern),更容易被下游的感知算法識(shí)別。Azimuth Normalization具有很強(qiáng)的拓展性,能夠應(yīng)用在多種傳感器產(chǎn)生的點(diǎn)云數(shù)據(jù)上(如LiDAR、RADAR、RGB-D camera),能夠與各類感知算法(如檢測(cè)、分割)結(jié)合并且不需要改變具體算法的實(shí)現(xiàn)細(xì)節(jié)和超參數(shù)。Azimuth Normalization能夠顯著提升感知算法的數(shù)據(jù)效率(Data Efficiency),收斂速度和性能上限,如圖1所示,AziNorm與SECOND [1] 檢測(cè)算法結(jié)合提升明顯,僅用10%的數(shù)據(jù)量或迭代次數(shù)就優(yōu)于充分訓(xùn)練的SECOND。
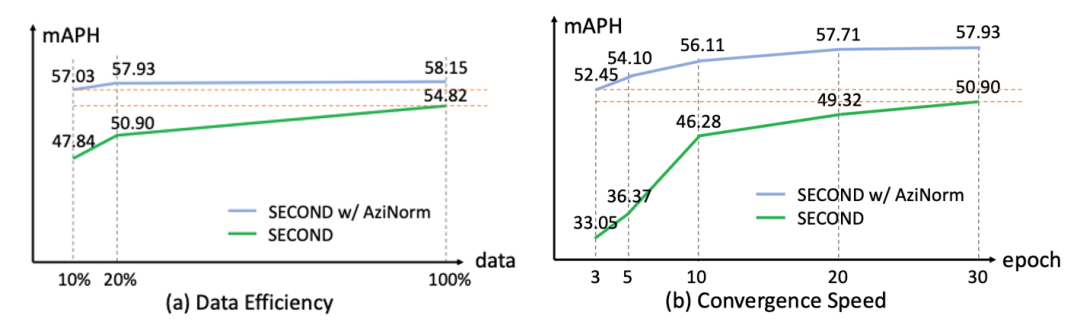
圖1 數(shù)據(jù)效率、收斂速度和性能上限
徑向?qū)ΨQ性
徑向?qū)ΨQ性與產(chǎn)生點(diǎn)云數(shù)據(jù)的傳感器(LiDAR / RADAR /RGB-D camera)的工作原理高度相關(guān)。以LiDAR為例,如圖2,LiDAR始終沿著徑向(法向)方向向各個(gè)方位角發(fā)射電磁波,電磁波觸碰到障礙物表面后反射,沿著徑向方向反射的回波最終被LiDAR接收,形成點(diǎn)云。因此,產(chǎn)生的點(diǎn)云在徑向方向上具有明顯的對(duì)稱性(如圖2中,地面的點(diǎn)云對(duì)稱性明顯)。

圖2 徑向?qū)ΨQ性(Radial Symmetry)
算法流程
Azimuth Normalization采用了分治的策略,具體流程如下(流程圖見圖3):
Patch Splitting:把整個(gè)感知范圍拆分為相互重疊的塊(patch), 把全場(chǎng)景的點(diǎn)云規(guī)則地分解為子點(diǎn)云;
Patch Filtering:濾除不包含點(diǎn)云的patch、只含地面點(diǎn)的patch(點(diǎn)云具有稀疏性、不均勻性),避免不必要的計(jì)算開銷;
Normalization:對(duì)子點(diǎn)云進(jìn)行平移變換、旋轉(zhuǎn)變換(對(duì)每個(gè)點(diǎn)的3D坐標(biāo)進(jìn)行),統(tǒng)一各個(gè)patch的徑向方向;
Patch-wise Perception:在patch level調(diào)用現(xiàn)成的感知算法(point-based、voxel-based、hybrid),不需要改變實(shí)現(xiàn)細(xì)節(jié)和超參數(shù);
Inverse Normalization:把感知結(jié)果逆變換回原本的LiDAR坐標(biāo)系;
Patch Merging:融合各個(gè)patch結(jié)果,對(duì)于不同的感知任務(wù)可以采用不同的融合策略,例如,對(duì)于檢測(cè)采用非極大值抑制(NMS),對(duì)于分割采用逐點(diǎn)平均。
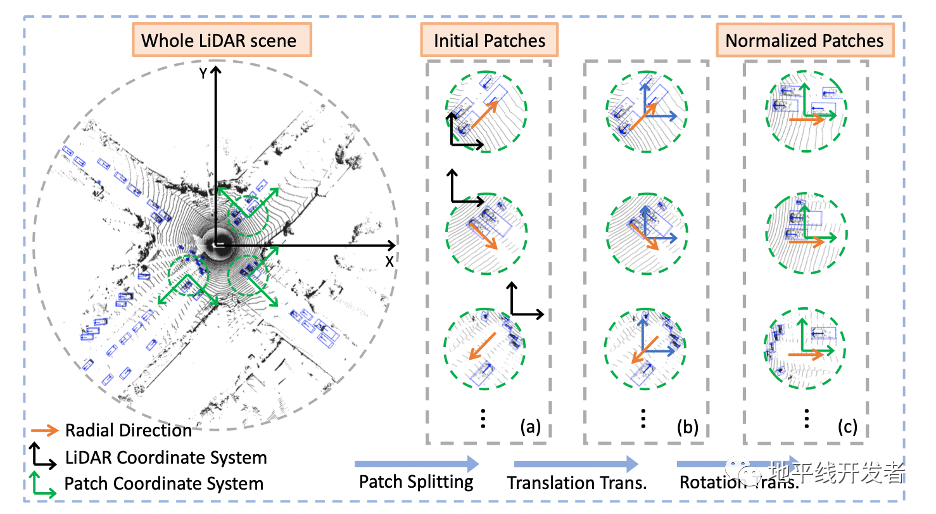
圖3 算法流程
實(shí)驗(yàn)結(jié)果
1. 點(diǎn)云檢測(cè)和點(diǎn)云分割表1和表2是Azimuth Normalization在點(diǎn)云檢測(cè)和分割兩個(gè)感知任務(wù)上的實(shí)驗(yàn)結(jié)果。值得注意的是,對(duì)于檢測(cè)難度大的類別(點(diǎn)稀疏、訓(xùn)練樣本數(shù)量少),如pedestrian和cyclist,Azimuth Normalization能夠帶來更明顯的增益。Azimuth Normalization極大地簡(jiǎn)化點(diǎn)云數(shù)據(jù)中的模式(pattern),消除方位角帶來的差異,在歸一化后,難類別檢測(cè)難度顯著降低。
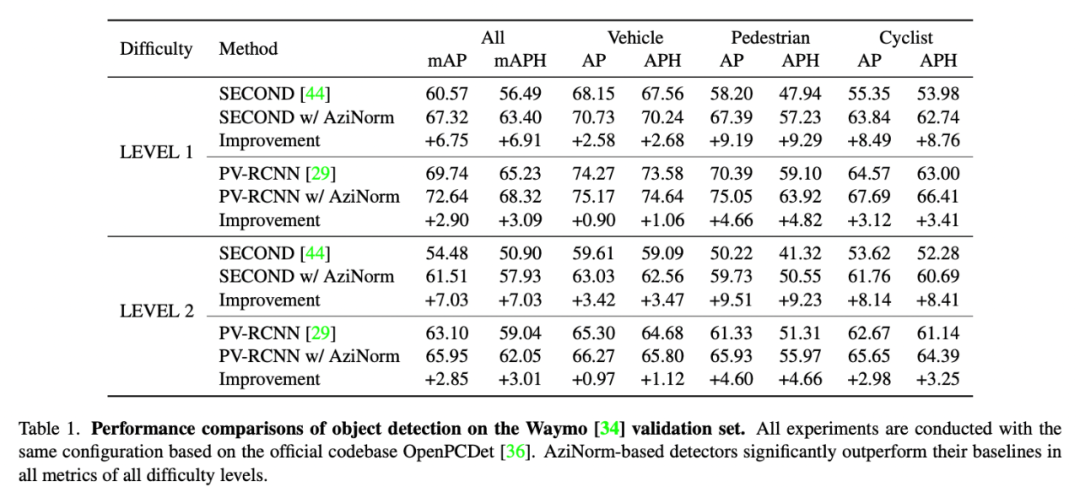
表1 點(diǎn)云檢測(cè)算法SECOND [1] 和PV-RCNN [2] 在Waymo val set上的實(shí)驗(yàn)結(jié)果
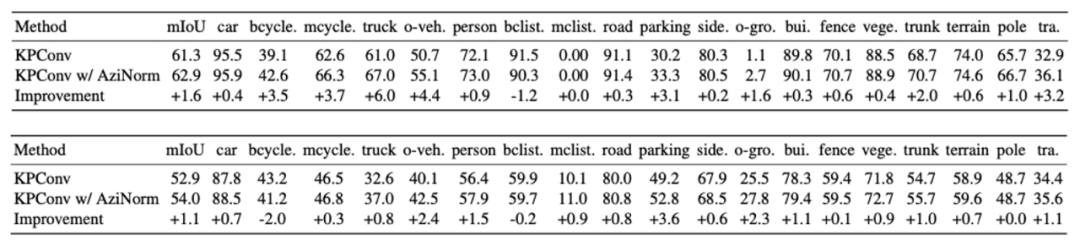
表2 點(diǎn)云分割算法KPConv [3] 在SemanticKitti val set和test set上的實(shí)驗(yàn)結(jié)果
2. 歸一化粒度(Normalization Granularity)圖4展示了另一種分治策略,被稱之為扇形區(qū)域歸一化(Sectorial Normalization)。點(diǎn)云被均勻劃分為扇形區(qū)域,并通過旋轉(zhuǎn)統(tǒng)一徑向方向。表3對(duì)比了Sectorial Normalization和Azimuth Normalization。4- 和8- Sectorial Normalization 把方位角的變化范圍分別縮小到了90o和45o,而Azimuth Normalization的歸一化粒度更小,因此性能提升更明顯。
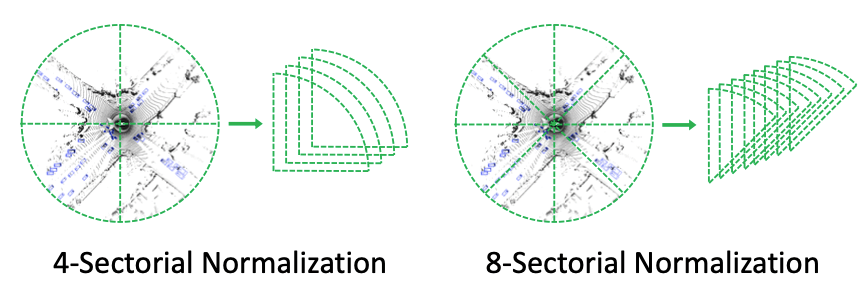
圖4 扇形區(qū)域歸一化(Sectorial Normalization)
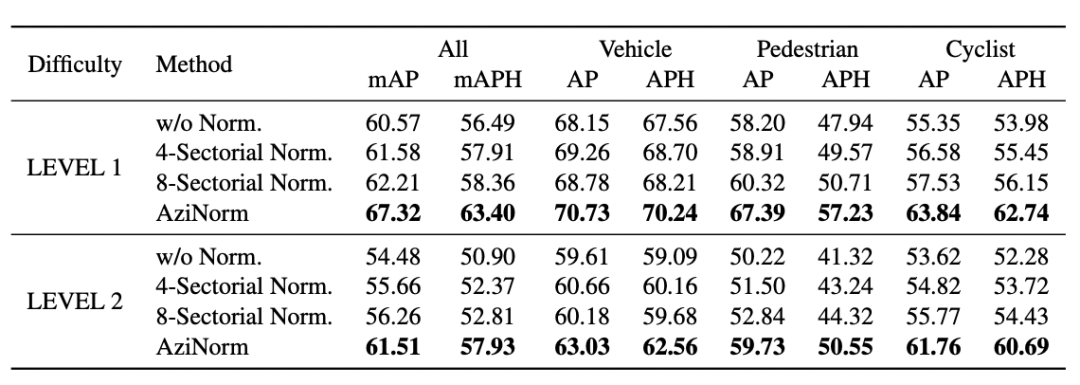
表3 歸一化粒度 (Normalization Granularity)
3. 消融實(shí)驗(yàn)表4是相關(guān)的消融實(shí)驗(yàn),驗(yàn)證了Azimuth Normalization的性能提升主要來自于旋轉(zhuǎn)變換,即對(duì)徑向方向的歸一化,以及Azimuth Normalization對(duì)patch的形狀layout、尺寸radius、間距stride的選擇不敏感。
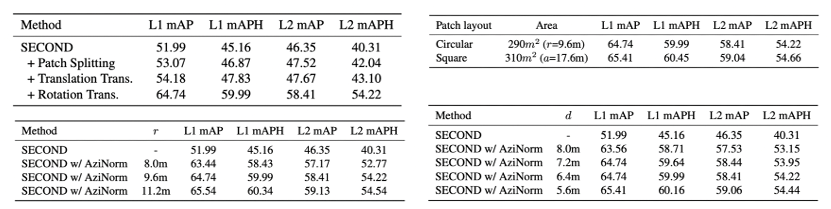
表4 消融實(shí)驗(yàn)
總結(jié)
Azimuth Normalization利用徑向?qū)ΨQ性對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行歸一化,帶來在數(shù)據(jù)效率、收斂速度、性能上限三個(gè)方面的提升,能夠減少感知算法對(duì)于數(shù)據(jù)量的需求,降低標(biāo)注成本,并且在對(duì)感知精度要求高的離線應(yīng)用場(chǎng)景中有較大的應(yīng)用價(jià)值,如自動(dòng)標(biāo)注(Auto Labeling)和生成高精地圖(HD Maps)。
原文標(biāo)題:CVPR 2022 | 基于徑向?qū)ΨQ性和分治策略的點(diǎn)云方位角歸一化
文章出處:【微信公眾號(hào):地平線HorizonRobotics】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
審核編輯:湯梓紅
-
方位角
+關(guān)注
關(guān)注
0文章
4瀏覽量
6758 -
點(diǎn)云數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
13瀏覽量
1528 -
地平線
+關(guān)注
關(guān)注
0文章
354瀏覽量
14994
原文標(biāo)題:CVPR 2022 | 基于徑向?qū)ΨQ性和分治策略的點(diǎn)云方位角歸一化
文章出處:【微信號(hào):horizonrobotics,微信公眾號(hào):地平線HorizonRobotics】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一徑科技引領(lǐng)車路云一體化,激光雷達(dá)賦能智慧交通
分布式云化數(shù)據(jù)庫(kù)有哪些類型
長(zhǎng)三角,如何把數(shù)據(jù)要素變成新長(zhǎng)江?

云數(shù)據(jù)庫(kù)和云主機(jī)哪個(gè)好一點(diǎn)?
基于深度學(xué)習(xí)的三維點(diǎn)云分類方法

什么是三維點(diǎn)云分割
英偉達(dá)推出歸一化Transformer,革命性提升LLM訓(xùn)練速度
一文講清什么是分布式云化數(shù)據(jù)庫(kù)!
輸電線路激光雷達(dá)點(diǎn)云監(jiān)測(cè)裝置的功能特點(diǎn)和技術(shù)參數(shù)介紹
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
【大規(guī)模語(yǔ)言模型:從理論到實(shí)踐】- 每日進(jìn)步一點(diǎn)點(diǎn)
請(qǐng)問對(duì)雷達(dá)獲取的原始數(shù)據(jù)進(jìn)行歸一化處理的具體方法是什么?
康謀分享|aiSim5激光雷達(dá)LiDAR模型驗(yàn)證方法(二)

基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論