 PID整定相關的專業知識講解
PID整定相關的專業知識講解
如何獲得PID控制器的最佳參數是很多儀表工還沒真正掌握的技能,為了方便大家深入了解PID整定,在本文整理PID整定相關的專業知識供大家學習。
1、PID整定參數
這三個字母是什么意思?它們如何影響你的工廠行為?
PID是比例、積分和導數的首字母縮寫。這些參數可以單獨或集體使用、調整和控制。例如,您可以使用P控制器、PI控制器或PID控制器。每個參數都可以單獨調整整定和控制,每個參數都可以用于特定目的。
PID參數表示為通用PID控制算法或ISA算法的參數:

u(t)為PID控制器輸出;u0為初始PID控制器輸出;Kc為總增益;TI為積分時間或重置時間;TD為微分時間;e(t)為設定值和過程值得偏差
1.1 什么是PID整定參數
常規PID回路由三項組成:
①偏差或PV的比例作用
②偏差的積分作用
③偏差或PV的微分作用
選擇正確的方程和最佳參數值是實現最佳整定的本質。
1.2 PID參數
①比例參數(P)描述
P作用與偏差或PV成正比。偏差(或PV)乘以比例增益并添加到控制器輸出。P動作使輸出朝正確方向“踢”。如果偏差值為零,則P動作為零。這意味著只有P動作的控制器需要非零偏差才能有非零輸出。因此,僅使用P控制不可能實現精確跟蹤。
②積分參數(I)描述
考慮PV和SP之間的偏差隨時間的變化曲線。在數學中,偏差的“積分”可以解釋為曲線和x軸之間以及y軸和當前時刻之間的曲面。每走一步,曲面都會向右延伸一點。如果此時偏差為零,則曲面不會增加,積分保持不變。
如果偏差為正,偏差曲線下方的曲面將增加,從而產生更高的控制器輸出。當偏差變為負值時,I動作將減小。
通常情況下,與比例動作相比,I動作的動作要慢得多。然而,它最終會使偏差為零,這是比例作用所不能做到的。所以基本上,積分動作會回顧過去,檢查偏差是否達到設定值。如果不是,它會作用于輸出。它將操縱方向盤,直到你朝著預定的方向前進。
③微分參數(D)描述
積分不可能預測偏差的行為。微分作用通過預測偏差的未來行為來解決這個問題。所以,微分作用就是偏差的變化。它會根據偏差的變化向輸出添加一個貢獻。當偏差為正,但開始減少D動作時,它將降低控制器的輸出。是制動器試圖避免超調。
它減少了其他兩個動作引起的振蕩。它可以將控制器加速到您想要達到的設定值。
它減少了其他兩個動作引起的振蕩。它可以將控制器加速到您想要達到的設定值。然而,微分作用在PID調節中并不常用。問題是它會放大噪音。如果偏差信號非常嘈雜,PID控制器輸出往往會大幅振蕩。這可能會對泵和閥門等設備的使用壽命產生負面影響。
2、什么是PID整定
PID控制是一種通用的控制方法,也是自動化領域的一項工作:99%的自動化控制回路都是PID。在開始研究方法和算法之前,有必要知道要采取哪些PID整定步驟以及為什么要采取這些步驟。因此,您將能夠充分利用PID整定,提高工廠性能。
2.1 PID整定是什么意思?
PID整定是指根據所用PID算法、開環過程行為和所需閉環行為的工程規范來確定PID參數的工作流程。
最優PID整定
高效地找到理想的P、I和D參數集就是我們所說的最優PID整定。在搜索參數的大范圍內,只有一組能夠獲得最佳性能。根據您使用的PID方法,計算出的參數可能更接近或更遠離此最佳設置。
過程行為
在PID整定中,過程行為是關鍵。只有在掌握正確的過程行為時,才能執行最佳整定。大多數方法將過程簡化為非常簡單的一階行為,盡管有許多過程不能用這些簡單的模型來描述。例如,蒸汽鍋爐汽包、過熱器、長延遲過程、(給水)間歇反應器和液位控制器。
工程規范
最后,您不應該忘記所需過程行為的工程規范。當設定值跟蹤是關鍵時,將其作為最優性的標準。當干擾抑制是關鍵時,關注這一點。當兩者都需要時,嘗試使用前饋。如果不允許超調(由于產品質量下降),則整定控制器以避免超調,或者如果實際工廠確實如此,則整定控制器以在非常寬的工作范圍內工作。
換句話說,PID整定意味著控制回路有一個特定的目標,通過使用正確的P、I和D參數可以實現該目標。因此,您將實現最佳的工廠優化。
2.2 為什么進行PID整定
為了獲得所需的閉環控制,PID整定是必要的。例如,如果想要控制溫度,則需要整定PID控制器,以將溫度保持在設定值。
整定的最低要求是,過程可以在閉環中穩定運行。
再進一步,PID整定將通過減少振蕩來控制設備。例如,這將導致更少的警報和更少的操作干預。
再往前走一步,你就會明白,由于優化了PID整定,工廠效率可以提高,比能耗可以降低,穩定性可以提高,警報和操作員干預的數量可以降到最低。
2.3 整定的關鍵
PID整定可以帶來很多好處。當您花時間將PID參數整定到最佳值時,可以獲得數周、數小時甚至數分鐘的回報。按照以下關鍵步驟第一次PID整定:
①了解你想要控制的過程的行為,例如通過使用(多)階躍測試。
②使用正確的系統辨識方法。
③檢查DCS PID算法,并在適當時進行更改
④制作自己的工程愿望清單,在其中選擇最佳跟蹤和/或最佳干擾抑制。不要忘記魯棒性和高頻增益。
④計算最佳參數,實施這些參數,并在實際設備上檢查結果。
⑤跟蹤并記錄您所做的更改。
3、PID整定方法
選擇正確的整定方法以運行穩定的生產過程
如何快速有效地整定PID控制器?這是一個讓許多工程師感到困惑的問題。
盡管PID整定的概念很簡單,但支持PID控制的數學基礎卻很復雜。一旦為問題選擇了最佳控制器配置,就必須整定參數。實現最佳性能需要為P、I和D選擇一組理想的數值。
概括地說,有三種方法可以確定這些設置的最佳組合:啟發式整定、基于規則的整定和基于模型的整定。每種方法都有其優缺點。盡管許多人可能認為試湊法是免費的,但它們往往非常昂貴。
3.1 什么是啟發式整定
啟發式整定方法是一種遵循一般規則以獲得近似或定性結果的方法。世界上大多數PID回路都采用這種方法進行整定,無論是好是壞。試湊法是啟發式整定的一個例子。
試湊法
試湊法是一種相對簡單的方法,一旦你對PID參數有了清晰的了解。從比例到積分再到微分,它在整個系統中循序漸進。通常從現有的一組參數開始,從中執行小調整整定以改善響應。對于新的PID回路,您可以從粗略而安全的初始猜測開始。
基本上,人們認為:
①引入P-動作以提高響應速度。過度的P作用會導致振蕩。
②引入I-動作以獲得所需的穩態響應。缺點是較長時間內振蕩響應較高。
③引入D-作用是為了阻尼。缺點是高頻振蕩的可能性更大,加上對噪聲的敏感性。
基于規則的PID整定方法假定某個過程響應,以獲得簡單的數學公式,從而實現PID控制器的調節。過程特性可以通過簡單的實驗得出,并用于計算PID參數。
請注意,此類整定方法對假設過程響應的差異(例如,一階線性延遲模型)非常敏感。特別是,與假定的過程時滯的較大偏差將極大地降低實際PID性能。此外,定義自己控制目標的可能性非常有限或不存在。
Lambda整定方法
Lambda整定方法的名字來源于希臘字母Lambda(λ)。它規定了控制器允許在穩定時間上花費的時間。Lambda整定方法假設的響應與Ziegler-Nichols方法相同。
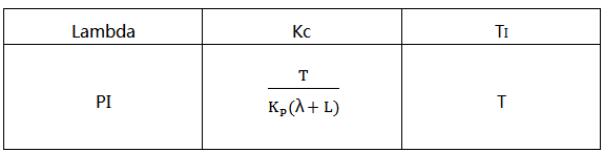
典型λ=max(L,T)(非常穩定)減少λ獲得更快響應。
3.3 什么是基于模型的整定?
基于模型的整定或基于優化的PID整定允許您使用系統模型以最佳方式獲得P、I和D參數。考慮了閉環行為的工程規范。
基于模型的PID整定是一種方法,允許您根據結構化整定過程進行工作,該過程考慮了您的過程行為和控制需求。啟發式和基于規則的調整需要一個迭代過程。ZieglerNichols等方法在許多(簡單)情況下給出了合理的結果,但無法提供與基于模型的PID調節相同的結構化過程和生產結果。
基于模型的調整方法可能看起來更耗時,但一旦為PID回路設置了正確的參數,您就會立即看到好處。這些好處將長期存在。在第一次將PID控制器設置正確后,您不必再次查看它,除非過程中發生了變化。
-
控制器
+關注
關注
112文章
16398瀏覽量
178525 -
PID
+關注
關注
35文章
1472瀏覽量
85605 -
模型
+關注
關注
1文章
3265瀏覽量
48921
發布評論請先 登錄
相關推薦
顯示器驅動版專業名詞介紹
接口測試理論、疑問收錄與擴展相關知識點

FUTEK傳感器在人形機器人中的應用
連接器相關基礎知識大講解
【實操文檔】在智能硬件的大模型語音交互流程中接入RAG知識庫
第九章-PID整定方法 STM32PID驅動編碼器 STM32PID控制電機轉速

第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析

斷路器整定電流怎么調整

尋找一個能夠PID調節的仿真軟件
淺談PID回路整定的兩種方法






 工商網監
工商網監
評論