 詳解定時器的輸入捕獲功能
詳解定時器的輸入捕獲功能
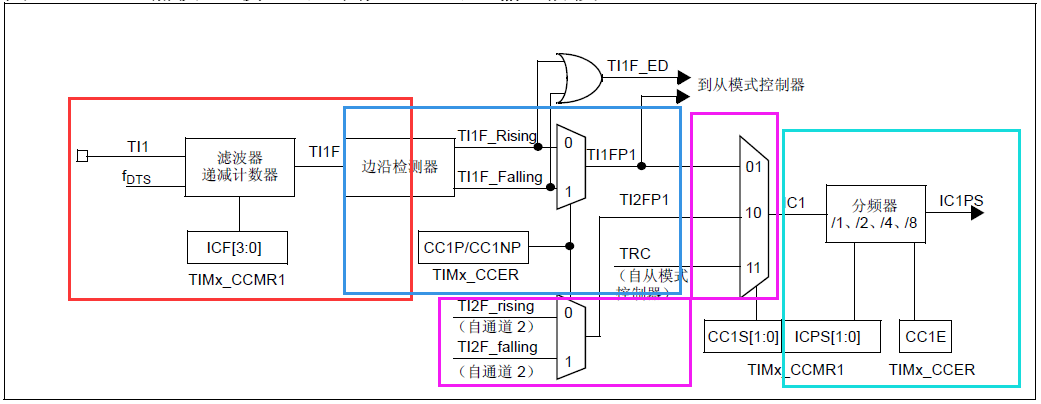
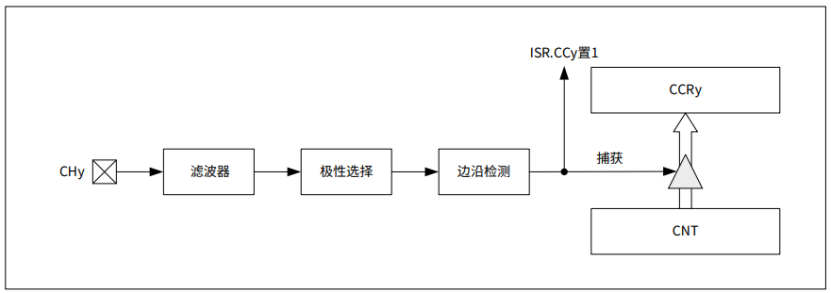
輸入捕獲就是用定時器檢測引腳上的電平時間,可以檢測高電平時間和低電平時間,然后可以算引腳上信號的頻率和占空比。
基本思路就是利用定時器的輸入捕獲功能。
定時器捕獲到高電平或低電平就會進入捕獲中斷
例如:
我們要捕獲高電平時間
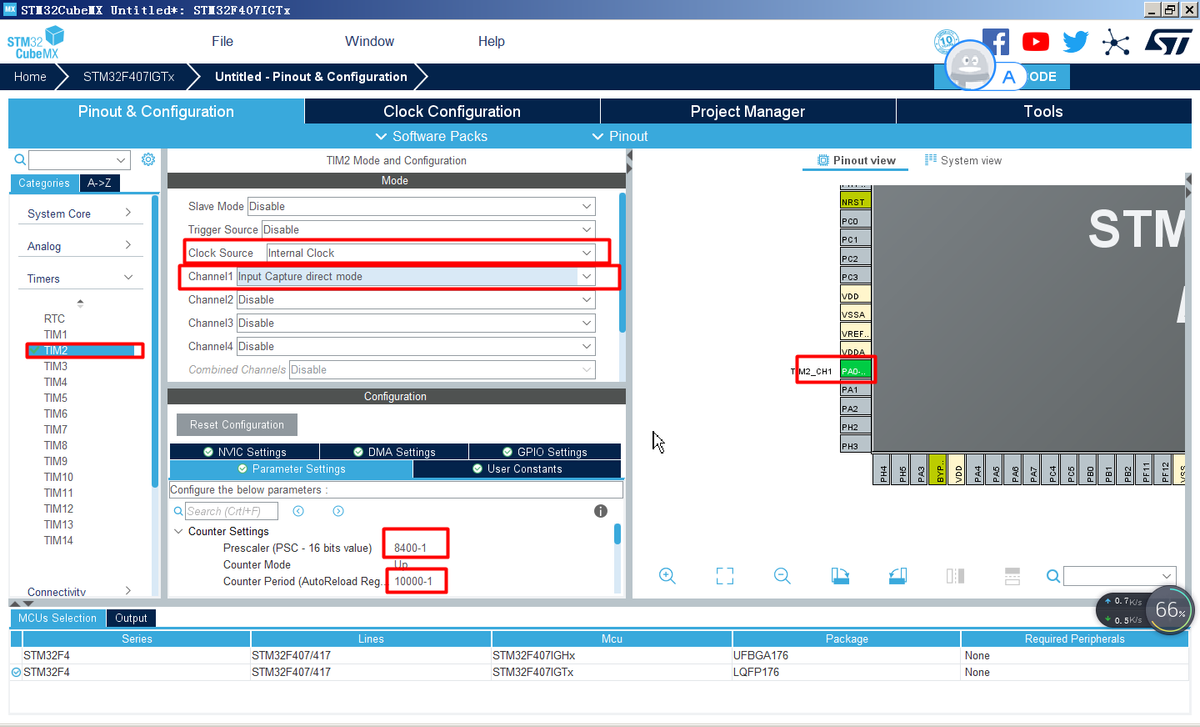
0 設置定時器計數頻率和裝載值,一般設置1MHz,65535
1 設置定時器捕獲為高電平捕獲
2 進入捕獲中斷后,獲取CNT計數值或CCRx值,定時器捕獲到電平后會把CNT的值保存到CCRx。
設置成低電平捕獲。
3 再次進入捕獲中斷,獲取CNT計數值-上次的CNT值=總高電平時間。
設置成高電平捕獲。
4 重復2-3即可完成下一次捕獲。當然還要考慮溢出的情況,代碼里有處理。
下面我寫的一個實例:
1 定時器1 PA8產生PWM信號,可改變占空比,檢測高電平時間
2 捕獲定時器是定時器2,初始化如上例。
3 仿真改變PA8占空比,查看捕獲出的高電平時間。
實測:

duty=1000就是高電平維持1000us,
捕獲時間也是對應的1000us,一點誤差都沒有。
代碼如下:
//高電平標志
u8 gao_flag=0;
//高電平時間
u32 gao_timer=0;
//捕獲成功標志
u8 buhuo_flag=0;
//溢出次數
u8 yichu_c=0;
//定時器 5 中斷服務程序
extern "C" void TIM2_IRQHandler(void)
{
if((TIM2CH1_CAPTURE_STA&0X80)==0)//還未成功捕獲
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) //這個是溢出中斷
{
//如果已經得到高電平了,CNT溢出了
if(gao_flag==1)
{
yichu_c++; //溢出加1
}
}
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)//捕獲 1 發生捕獲事件
{
if(0==gao_flag&&buhuo_flag==0) //說明之前沒有捕獲到高電平
{
gao_timer=TIM2->CCR1; //獲取高電平時間
yichu_c=0; //溢出清零
gao_flag=1; //高電平標志
TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Falling); //改成下降沿捕獲
}
//再一次進入捕獲中斷說明是捕獲到下降沿了
else
{
if(buhuo_flag==0) //判斷是否捕獲成功了,如果捕獲成功了就不在捕獲了
{
gao_timer=TIM2->CCR1-gao_timer; //獲取捕獲到的高電平時間
gao_timer+=yichu_c*65536; //加上溢出時間
TIM2->CNT=0; //計數清零
gao_flag=0; //高電平標志清零
buhuo_flag=1; //標志捕獲成功了
TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Rising); //改成上沿捕獲
}
}
}
}
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1|TIM_IT_Update); //清除中斷標志位
}
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStrue;
TIM_OCInitTypeDef TIM_OCInitStrue;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //使能TIM3和相關GPIO時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);// 使能GPIOB時鐘(LED在BP5引腳),使能AFIO時鐘(定時器3通道2需要重映射到BP5引腳)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_8; // TIM_CH2
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP; // 復用推挽
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz; //設置最大輸出速度
GPIO_Init(GPIOA,&GPIO_InitStrue); //GPIO端口初始化設置
//TIM1->CCMR1&=0xF7F7; //關閉事件更新值
//TIM1->CCMR1|=0x808; //開啟事件更新值
TIM_TimeBaseInitStrue.TIM_Period=50000; //設置自動重裝載值
TIM_TimeBaseInitStrue.TIM_Prescaler=71; //預分頻系數
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //計數器向上溢出
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //時鐘的分頻因子,起到了一點點的延時作用,一般設為TIM_CKD_DIV1
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStrue); //TIM3初始化設置(設置PWM的周期)
TIM_OCInitStrue.TIM_OCMode=TIM_OCMode_PWM2; // PWM模式2:CNT>CCR時輸出有效
TIM_OCInitStrue.TIM_OCPolarity=TIM_OCPolarity_Low;// 設置極性-有效為高電平
TIM_OCInitStrue.TIM_OutputState=TIM_OutputState_Enable;// 輸出使能
TIM_OCInitStrue.TIM_Pulse=100;
TIM_OC1Init(TIM1,&TIM_OCInitStrue); //TIM3的通道2PWM 模式設置
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable); //使能預裝載寄存器
TIM_Cmd(TIM1,ENABLE); //使能TIM3
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM1->CCMR1&=0xF7F7; //關閉事件更新值
}
void capture_init(u16 arr,u16 psc)
{
TIM_OCInitTypeDef TIM2_OCInitStructure;
TIM_ICInitTypeDef TIM2_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能 TIM2 時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能 GPIOA 時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前設置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉
//初始化定時器 2 TIM2
TIM_TimeBaseStructure.TIM_Period = arr; //設定計數器自動重裝值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //預分頻器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //設置時鐘分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上計數
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //初始化 TIMx 的時間基數單位
//初始化 TIM2 輸入捕獲參數
TIM2_ICInitStructure.TIM_Channel = TIM_Channel_1; //選擇輸入端 IC1 映射到 TI1 上
TIM2_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕獲
TIM2_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM2_ICInitStructure.TIM_ICPrescaler = TIM_CKD_DIV1; //配置輸入分頻,不分頻
TIM2_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置輸入濾波器 不濾波
TIM_ICInit(TIM2, &TIM2_ICInitStructure);
//中斷分組初始化
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2 中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占優先級 2 級
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //從優先級 0 級
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化外設 NVIC 寄存器
TIM_ITConfig(TIM2,TIM_IT_Update|TIM_IT_CC1,ENABLE);
TIM_Cmd(TIM2,ENABLE ); //使能定時器3
}
u16 duty=1000;
int main(void)
{
serial_init(115200); //串口初始化為 9600
TIM1_PWM_Init(1000,71); //
PAout(1)=1;
capture_init(0XFFFF,72-1); //以 1Mhz 的頻率計數
printf("initrn");
while(1)
{
//測試位運算和邏輯運算的速度
PAout(1)=1;
TIM1->CCR1=duty;
delay_ms(10);
if(buhuo_flag==1)
{
printf("HIGH1:%d us rn",gao_timer); //打印總的高點平時間
buhuo_flag=0; //重新捕獲
}
PAout(1)=0;
delay_ms(10);
}
}
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
寄存器
+關注
關注
31文章
5336瀏覽量
120232 -
電平
+關注
關注
5文章
360瀏覽量
39883 -
定時器
+關注
關注
23文章
3246瀏覽量
114720
發布評論請先 登錄
相關推薦
STM32 --通用定時器輸入捕獲功能 精選資料推薦
問題:開始的時候沒有搞清楚 定時器時基 于 定時器溢出中斷導致在計算的時候一直有問題。開始并沒有懷疑是配置有問題,因為之前接觸過定時器輸入捕獲
發表于 08-19 06:34
stm32定時器輸入捕獲
不同頻率、不同占空比的方波信號、PWM信號,同時做為輸入捕獲功能時,可以測量脈沖寬度、實現電容按鍵檢測等等。 一、輸入捕獲概念
發表于 10-13 09:13
?2.4w次閱讀
基于STM32定時器捕獲測量脈寬的應用示例
來實現脈寬測量,我們可以選用一個通道、也可以使用兩個通道。使用1個通道時,只需使用定時器基本的輸入捕獲功能結合中斷或DMA即可實現;若使用兩個通道時可以將
stm32定時器輸入捕獲配置步驟及實例筆記
輸入捕獲的一般配置步驟:初始化定時器和通道對應IO的時鐘。初始化IO口,模式為輸入:GPIO_Init(); GPIO_InitStructure.GPIO_Mode = GPIO_M
發表于 11-23 18:21
?42次下載






 工商網監
工商網監
評論