") 毫米波雷達(dá)系統(tǒng)工作過(guò)程
毫米波雷達(dá)系統(tǒng)工作過(guò)程
毫米波雷達(dá)目前是車(chē)用探測(cè)雷達(dá)中最為主要的探測(cè)器件,但目前的毫米波雷達(dá)是進(jìn)行二維掃描平面掃描,如何進(jìn)行立體掃描是毫米波使用的重要研究方向,文章利用波束集中及 3D MIMO 計(jì)算實(shí)現(xiàn)了立體點(diǎn)云掃描。
目前的汽車(chē)領(lǐng)域智能駕駛中,車(chē)輛駕駛的安全性能,自動(dòng)駕駛能力,探測(cè)精度,功能性能越來(lái)越受到消費(fèi)者的關(guān)注。
毫米波雷達(dá)圖對(duì)比其他車(chē)用傳感器,具有顯著優(yōu)點(diǎn),工作頻率極高,波長(zhǎng)短,能夠具有較高的分辨率,同時(shí)具備全天候測(cè)量的能力,對(duì)比天氣影響因素較小,雨雪天線情況下依然能夠正常使用,特別適用于車(chē)輛使用。
毫米波雷達(dá)系統(tǒng)工作過(guò)程
傳統(tǒng)毫米波雷達(dá)通過(guò)輻射的毫米波利用對(duì)探測(cè)物的反射波進(jìn)行定位與回波顯示,其工作的過(guò)程主要是:
雷達(dá)通過(guò)射頻系統(tǒng)輻射電磁波對(duì)被探測(cè)物體進(jìn)行電磁波的檢測(cè)與掃描,利用反射回來(lái)的電磁波,進(jìn)行放大與信號(hào)解析計(jì)算,可以計(jì)算出物體的遠(yuǎn)近距離以及結(jié)合不同的方位角計(jì)算出物體的左右間距離。利用多普勒效應(yīng)在最終計(jì)算出移動(dòng)物體探測(cè)的速度,方位等。
雷達(dá)系統(tǒng)通過(guò)輻射電磁波和接收物體反射電磁波對(duì)目標(biāo)進(jìn)行檢測(cè)和定位,其工作過(guò)程主要為:
雷達(dá)通過(guò)天線發(fā)射特定波形的電磁波,在有效輻射范圍內(nèi)被目標(biāo)截獲,目標(biāo)反射電磁波到很多方向上, 其中一部分能量返回至天線處被雷達(dá)接收,并通過(guò)放大,信號(hào)處理等過(guò)程最終計(jì)算出目標(biāo)相對(duì)雷達(dá)的位置,移動(dòng)速度,方位等信息。
圖1 車(chē)載前置毫米波雷達(dá)
現(xiàn)階段毫米波雷達(dá)主要應(yīng)用于車(chē)輛前部,進(jìn)行車(chē)輛前部碰撞預(yù)警,主要波束的工作模式為連續(xù)波和雷達(dá)的脈沖波束,工作模式為連續(xù)的波束,主要波形為 LMCW,CW,F(xiàn)SK。
車(chē)載毫米波雷達(dá)系統(tǒng)包含射頻模塊,信號(hào)處理模塊,以及總體電路部分,目前的毫米波雷達(dá)俯仰角一般為平行于水平面±2 度,形成低俯仰角平面波束,對(duì)前方車(chē)輛能夠進(jìn)行位置速度的測(cè)量。
車(chē)載毫米波雷達(dá)數(shù)據(jù)處理方式研究對(duì)比
目前的車(chē)載毫米波雷達(dá)對(duì)于探測(cè)到的回波數(shù)據(jù)直接使用平面探測(cè)數(shù)據(jù),或者進(jìn)行毫米波數(shù)據(jù)探測(cè)計(jì)算,根據(jù)車(chē)輛運(yùn)動(dòng)的特征情況,形成毫米波雷達(dá)報(bào)警信號(hào),目前報(bào)警信號(hào)分為兩種:
一種為閾值報(bào)警,當(dāng)達(dá)到一定的距離時(shí),信號(hào)進(jìn)行報(bào)警,此種報(bào)警方式較為簡(jiǎn)單,同時(shí)存在誤報(bào)及預(yù)測(cè)不足的可能性。
另一種為系統(tǒng)內(nèi)部計(jì)算的校驗(yàn),毫米波雷達(dá)內(nèi)部存有芯片,當(dāng)收到多目標(biāo)的掃描信號(hào)后,對(duì)信號(hào)進(jìn)行分析,分析出自主的影響較大的主目標(biāo)信號(hào),排除雜繞信號(hào),再將主副信號(hào)進(jìn)行速度及距離的聯(lián)合計(jì)算,形成低級(jí)別的報(bào)警及信號(hào)預(yù)測(cè)。
基于點(diǎn)跡進(jìn)行報(bào)警處理,數(shù)據(jù)處理相對(duì)較為簡(jiǎn)單,主要步驟為對(duì)信號(hào)處理產(chǎn)生的原始點(diǎn)跡數(shù)據(jù)先進(jìn)行單點(diǎn)報(bào)警處理, 對(duì)滿(mǎn)足單點(diǎn)報(bào)警的目標(biāo)點(diǎn)跡進(jìn)行滑窗統(tǒng)計(jì),當(dāng)滿(mǎn)足滑窗規(guī)則 n/m(m 為滑窗最大門(mén)限,n 為報(bào)警點(diǎn)跡數(shù)量)時(shí)形成雷達(dá)報(bào)警。
由于數(shù)據(jù)處理相對(duì)簡(jiǎn)單,所以雷達(dá)報(bào)警響應(yīng)更快。若信號(hào)處理產(chǎn)生點(diǎn)跡質(zhì)量不高,則需進(jìn)行較多虛警處理,以提高雷達(dá)報(bào)警準(zhǔn)確率。在虛警處理時(shí)需要更多考慮目標(biāo)的運(yùn)動(dòng)特征。
分析數(shù)據(jù)之間的關(guān)聯(lián)性,及目標(biāo)數(shù)據(jù)在滑窗期間的變化規(guī)律。此種數(shù)據(jù)處理方式主要應(yīng)用在級(jí)別較低的駕駛輔助系統(tǒng),對(duì)盲區(qū)內(nèi)目標(biāo)數(shù)量不做具體要求,當(dāng)目標(biāo)處于盲區(qū)滿(mǎn)足報(bào)警規(guī)則即可形成雷達(dá)報(bào)警。
雷達(dá)航跡處理主要步驟:雷達(dá)數(shù)據(jù)處理系統(tǒng)在獲取信號(hào)處理產(chǎn)生的點(diǎn)跡數(shù)據(jù)后, 主要進(jìn)行航跡數(shù)據(jù)關(guān)聯(lián)、航跡起始、航跡濾波與預(yù)測(cè)、航跡管理與維持。
航跡處理的輸入是經(jīng)過(guò)坐標(biāo)轉(zhuǎn)換和點(diǎn)跡凝聚處理的一批原始點(diǎn)跡, 然后所有點(diǎn)跡與已有航跡進(jìn)行相關(guān)處理,落入航跡的相關(guān)波門(mén)的點(diǎn)跡,即與航跡相關(guān)成功, 通過(guò)航跡濾波與預(yù)測(cè)選擇是該航跡目標(biāo)點(diǎn)的概率最大的點(diǎn)跡,若找到該點(diǎn)跡,對(duì)航跡進(jìn)行更新處理;
若出現(xiàn)沒(méi)有和所有航跡相關(guān)的點(diǎn)跡,則可能是新航跡點(diǎn),若是新航跡點(diǎn),利用航跡起始算法進(jìn)行航跡起始,若不是新航跡點(diǎn)又不是已有航跡的目標(biāo)點(diǎn),則可能是還未起始成功的舊航跡目標(biāo)點(diǎn),航跡重現(xiàn)輸出;若上述所有情況都不是,則把該點(diǎn)跡作為“ 非關(guān)聯(lián)點(diǎn)跡”緩存到航跡數(shù)據(jù)庫(kù),進(jìn)行下一步判斷。
航跡處理的基本功能是循序漸進(jìn)的,是對(duì)雷達(dá)當(dāng)前觀測(cè)周期點(diǎn)跡的歸屬進(jìn)行分類(lèi), 其中的關(guān)鍵技術(shù)主要是點(diǎn)跡與航跡相關(guān)、航跡濾波與預(yù)測(cè)及航跡起始。
毫米波二維像的生成
目前現(xiàn)行的毫米波雷達(dá)頻段為 77Ghz-81Ghz,較高的頻率能夠使毫米波雷達(dá)獲得更高的分辨率,利用毫米波對(duì)于 X向回波的信號(hào)解析,測(cè)算出準(zhǔn)確的目標(biāo)距離,精度可以在10cm 以?xún)?nèi)。
同時(shí)利用毫米波雷達(dá)左右兩側(cè)的雷達(dá)回波天線,形成左右側(cè)回波差,回波差經(jīng)過(guò)計(jì)算得出相位差,利用相位差可以得到左右側(cè)距離差,即角分辨率。同時(shí)利用探測(cè)物運(yùn)動(dòng)形成的多普勒效應(yīng),可以準(zhǔn)確計(jì)算出物體的移動(dòng)速度。形成多普勒像,最終得到物體的運(yùn)行速度,分布圖像。
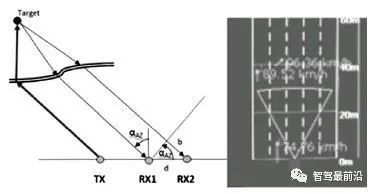
圖2 二維毫米波雷達(dá)成像效果
高級(jí)的毫米波雷達(dá)輔助駕駛系統(tǒng)要求車(chē)載毫米波雷達(dá)同時(shí)跟蹤道路上多個(gè)范圍內(nèi)目標(biāo),同時(shí)前向毫米波雷達(dá)需要跟蹤車(chē)輛正前方不同的目標(biāo)物,并對(duì)不同狀態(tài)的目標(biāo)物進(jìn)行標(biāo)記與跟蹤,所以目前的毫米波雷達(dá)都是使用平面掃描模式,平面掃描也會(huì)導(dǎo)致適用范圍受限,無(wú)法還原 3 維的點(diǎn)云效果,同時(shí)無(wú)法進(jìn)一步提升傳感器的使用范圍。
三維圖像掃描原理
目前的毫米波雷達(dá)已經(jīng)不能滿(mǎn)足于二維平面的掃描,現(xiàn)在車(chē)用的的雷達(dá)傳感器希望能夠掃描三維的點(diǎn)云數(shù)據(jù),但基于現(xiàn)有的收發(fā)系統(tǒng)多進(jìn)多出(MIMO)是為極大地提高信道容量,在發(fā)送端和接收端都使用多根天線,在收發(fā)之間構(gòu)成多個(gè)信道的天線系統(tǒng)。
MIMO 系統(tǒng)的一個(gè)明顯特點(diǎn)就是具有極高的頻譜利用效率,在對(duì)現(xiàn)有頻譜資源充分利用的基礎(chǔ)上通過(guò)利用空間資源來(lái)獲取可靠性與有效性?xún)煞矫嬖鲆妫浯鷥r(jià)是增加了發(fā)送端與接收端的處理復(fù)雜度。
使用 MIMO 技術(shù)可以利用天線有效提高頻譜掃描效率。利用現(xiàn)有的毫米波射頻芯片,可采用 MiMO 陣列天線原理,利用 X,Y.Z 平面不同射頻天線,回波相位差實(shí)現(xiàn) 3D 數(shù)據(jù)掃描。
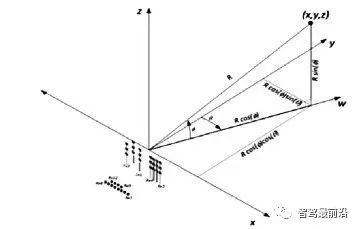
圖3 3D毫米波雷達(dá)掃描示意圖
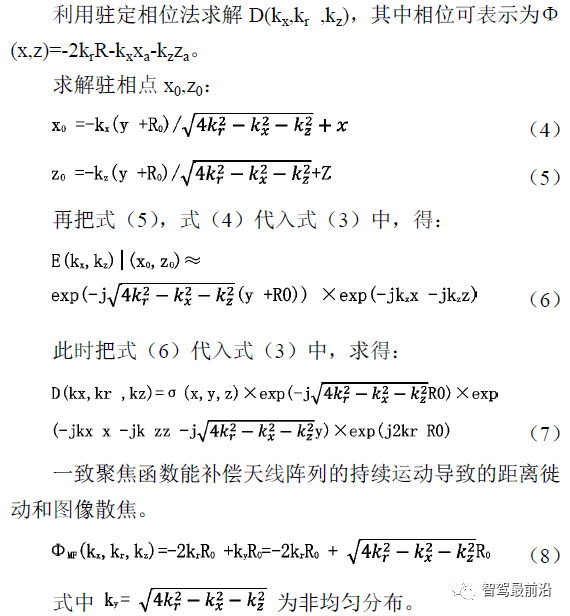
近場(chǎng)毫米波成像算法
假設(shè)目標(biāo)點(diǎn)(x,y,z) 的發(fā)射系數(shù)為σ(x,y,z),則在掃描范圍內(nèi)的信號(hào)散射信息可表示為:

式中

二維頻域波數(shù)與頻率的關(guān)系是 f = ckr/2π,c 代表光速;exp(j2krR0)表示對(duì)接收到的數(shù)據(jù)在距離為 R0 的平面內(nèi)進(jìn)行鄰近聚焦,即數(shù)據(jù)預(yù)處理。
為了計(jì)算方便,可以忽略考慮自由空間傳播和天線陣列模式中的能量損失。對(duì)(1)式進(jìn)行 二維傅里葉變換(FFT)為 D(kx,kr ,kz) :

近場(chǎng)毫米波成像算法主要依賴(lài)快速傅里葉變換(FFT),其中變量 x,y 的 FFT 空間波數(shù)域?yàn)?kx 和 kz。
假設(shè)對(duì)式(2)中的積分如下:

波束優(yōu)化控制
利用超材料介質(zhì)層,利用超材料介質(zhì)層形成更好的波束匯聚效果。同等口徑雷達(dá)加載超材料波束對(duì)比 3dB 波束寬度收窄 35%,完成了新型毫米波雷達(dá)天線加載超材料的設(shè)計(jì),具體為采用十字形超材料單元結(jié)構(gòu)。
毫米波雷達(dá)天線加載超材料帶寬為 76-82GHz,完全可以覆蓋毫米波雷達(dá)的工作頻段。加載超材料后,在φ=90o方向和φ=0o方向,天線的柵瓣減小了,可以有效提高系統(tǒng)的信噪比,同時(shí)天線增益提高了。同時(shí)將完成的超材料樣件放置于車(chē)輛天線前部,形成透鏡天線效果。
仿真與試驗(yàn)結(jié)果
4D 雷達(dá)結(jié)合 MiMO 天線技術(shù),利用電磁超材料對(duì)毫米 波傳輸?shù)木珳?zhǔn)有序調(diào)控,使雷達(dá)能夠測(cè)量目標(biāo)物體的 3D 坐標(biāo)+1D 速度。
最終可滿(mǎn)足全天候工作,長(zhǎng)距離探測(cè),立體空間掃描等功能,除具備傳統(tǒng)毫米波雷達(dá)平面掃描功能外還可以實(shí)現(xiàn) 16 線激光雷達(dá)立體點(diǎn)云成像效果。
最終成品造價(jià)約為目前 8-16 線激光雷達(dá)的5-10%,并可在任何天氣環(huán)境情況下工作,同時(shí)長(zhǎng)距離掃描(》150m),車(chē)規(guī)級(jí)耐用度等方面均具有明顯優(yōu)勢(shì)。
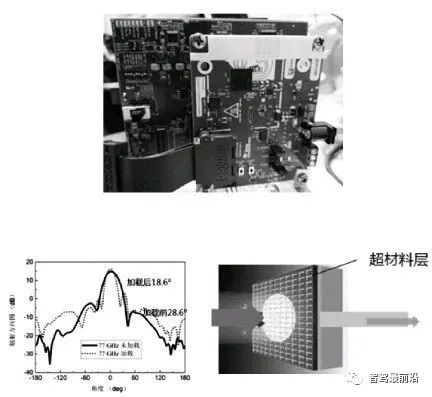
圖4 加載超材料樣機(jī)照片
核心技術(shù)特點(diǎn):傳統(tǒng)毫米波雷達(dá)天線提升波束質(zhì)量,需增加天線等效口徑尺寸。而現(xiàn)階段同樣口徑天線,加載超材料后,波束寬度收窄 35%,有效提升了信噪比及輸出環(huán)境點(diǎn)云圖質(zhì)量,同時(shí)可進(jìn)行動(dòng)態(tài)目標(biāo)跟蹤檢測(cè)。
配套完成 4D 雷達(dá)成像軟件開(kāi)發(fā),可實(shí)現(xiàn) 4D 點(diǎn)云成像每幀的信息傳送同時(shí)還可搭配速度傳感器等相關(guān)位置傳感器,實(shí)現(xiàn)場(chǎng)景點(diǎn)云的建模。
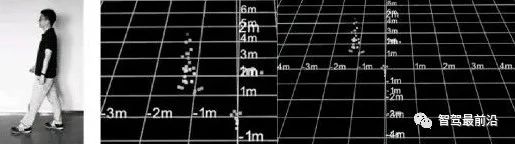
圖5 4D雷達(dá)點(diǎn)云掃描示意圖
車(chē)用智能駕駛輔助系統(tǒng),在車(chē)載自動(dòng)駕駛中占有非常重要的作用,同時(shí)車(chē)載毫米波雷達(dá)作為其中最重要的傳感器之一,目前由于其全天候,低成本,多功能的優(yōu)異性能越來(lái)越引起相關(guān)研發(fā)與應(yīng)用部門(mén)的關(guān)注,同時(shí)將 2D 毫米波雷達(dá)擴(kuò)展成為 3D 掃描毫米波雷達(dá),以及將毫米波雷達(dá)進(jìn)一步研發(fā)形成高分辨率毫米波雷達(dá)等相關(guān)研究方向越來(lái)越成為主流。本文中將毫米波雷達(dá)波束進(jìn)一步優(yōu)化,再進(jìn)行 3D 數(shù)據(jù)掃描,實(shí)現(xiàn)毫米波雷達(dá)的多能應(yīng)用。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2552文章
51219瀏覽量
754620 -
電磁波
+關(guān)注
關(guān)注
21文章
1457瀏覽量
53870 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1048瀏覽量
64420
原文標(biāo)題:一文讀懂毫米波立體成像雷達(dá)
文章出處:【微信號(hào):Zidonjiashi,微信公眾號(hào):Zidonjiashi】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
毫米波雷達(dá)信號(hào)的傳輸特性
毫米波雷達(dá)的基頻和調(diào)制技術(shù) 毫米波雷達(dá)在機(jī)器人導(dǎo)航中的應(yīng)用
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)與激光雷達(dá)比較 毫米波雷達(dá)在自動(dòng)駕駛中的作用
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型

毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別是什么
毫米波雷達(dá)與多普勒雷達(dá)區(qū)別是什么
簡(jiǎn)述毫米波雷達(dá)的結(jié)構(gòu)、原理和特點(diǎn)
毫米波雷達(dá)具有哪些特點(diǎn)和優(yōu)勢(shì)
激光雷達(dá)VS毫米波雷達(dá),一文讀懂!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論