 Basic語言如何開發控制器程序
Basic語言如何開發控制器程序
XPLC006E功能介紹
XPLC006E是正運動運動控制器推出的一款多軸經濟型EtherCAT總線運動控制器,XPLC系列運動控制器可應用于各種需要脫機或聯機運行的場合。
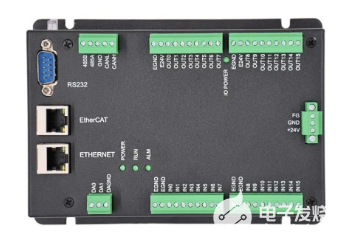
XPLC006E自帶6個電機軸,最多12軸運動控制(含虛擬軸數),支持12軸直線插補、電子凸輪、電子齒輪、同步跟隨、虛擬軸設置等功能。
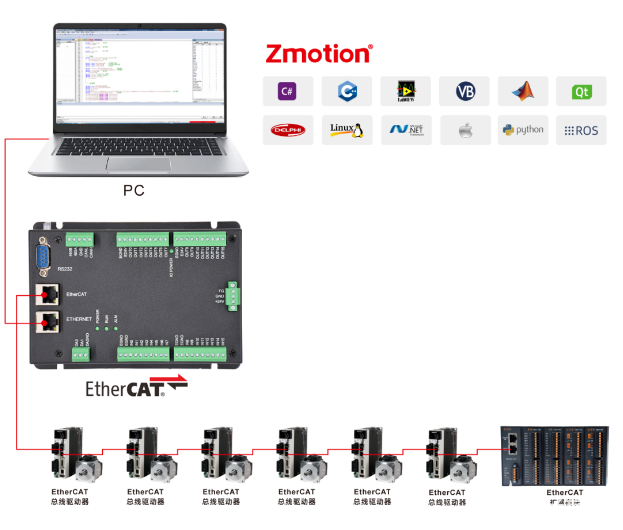
XPLC006E支持多任務同時運行,同時可以在PC上直接仿真運行,編程方式多種可選,支持ZDevelop軟件的Basic/PLC梯形圖/HMI組態和常用上位機軟件編程。
XPLC006E只支持EtherCAT總線軸,不支持脈沖軸和編碼器軸。采用EtherCAT總線與驅動器通訊,1ms的刷新周期。
XPLC006E支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
→此款產品有XPLC004E、XPLC006E、XPLC008E三個不同軸數的型號可選。
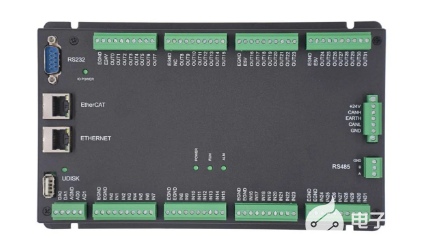
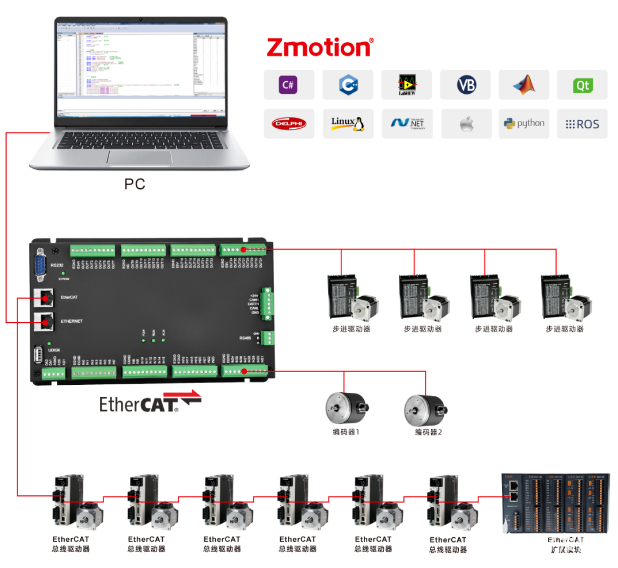
XPLC864E2功能介紹
XPLC864E2在XPLC006E的功能基礎上做了升級(即上節介紹的XPLC006E的功能都支持),部分資源空間優于XPLC006E,使用方法基本一致,不同之處在于XPLC864E2,硬件支持32點輸入、32點輸出、2個ADC、2個DAC,支持脈沖軸和總線軸混合使用,總實軸軸數為8,除了帶EtherCAT接口之外,輸出口硬件上可配置為8個軸的脈沖方向信號輸出,另帶兩路編碼器輸入,可由輸入口配置。
XPLC864E2支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
XPLC系列經濟型EtherCAT總線運動控制器支持多種編程方式,支持使用正運動技術自主研發的ZDevelop開發環境的basic語言和PLC梯形圖,同時還支持市面上常用的上位機開發環境與操作系統,包括不限于C、C++、C#、LabView、Matlab、Linux、ROS等。
本節內容主要講解Basic語言如何開發控制器程序。
一 前期準備工作
在正運動技術官網下載新版編程軟件ZDevelopV3.10.06,準備一臺XPLC系列經濟型EtherCAT總線運動控制器,按照上方的XPLC006E參考架構完成接線。
沒有控制器的場合也可完成ZBasic的開發,程序下載到仿真器運行即可,仿真器是ZDevelop軟件安裝包自帶的。
二 下載Basic程序到控制器
1.新建工程項目,并下載程序文件到控制器運動的流程如下圖。
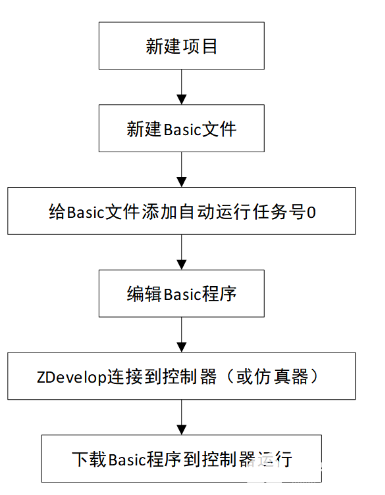
打開已有的項目文件運行,需要打開“.zpj”文件,再連接控制器,下載程序運動。
2.詳細操作流程說明。
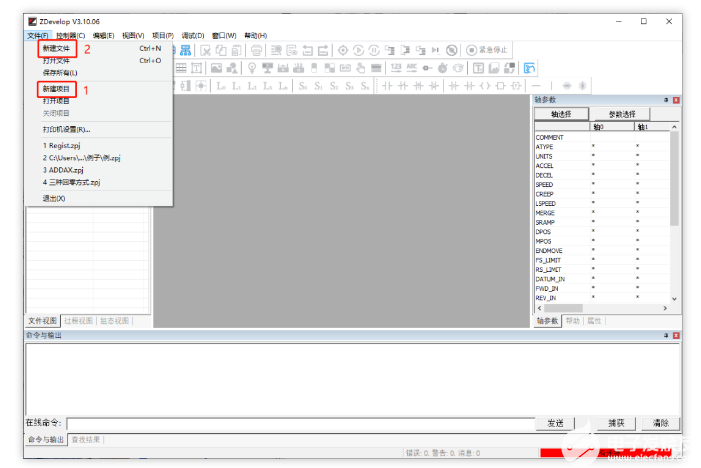
(1)新建項目:菜單欄“文件”--“新建項目”。
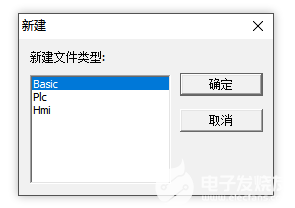
點擊“新建項目”后彈出“另存為”界面,選擇一個文件夾打開,輸入文件名后保存項目,后綴為“.zpj”。(2)新建文件:菜單欄“文件”--“新建文件”。
點擊“新建文件”后,出現下圖彈窗,選擇新建的文件類型為Basic后點擊確認。支持Basic/Plc/Hmi混合編程。
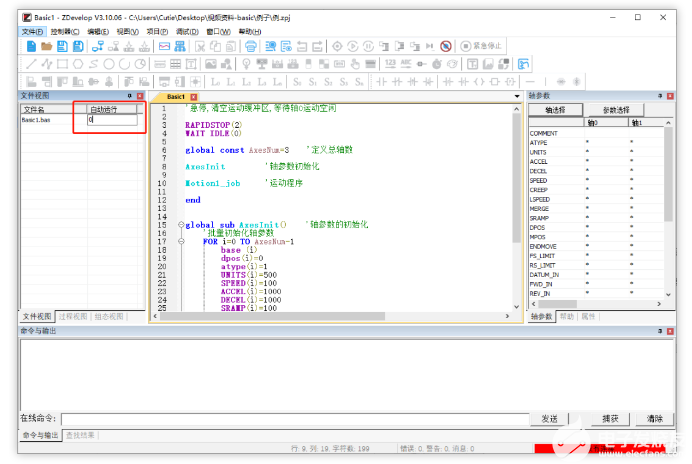
(3)設置文件自動運行:雙擊文件右邊自動運行的位置,輸入任務號“0”。
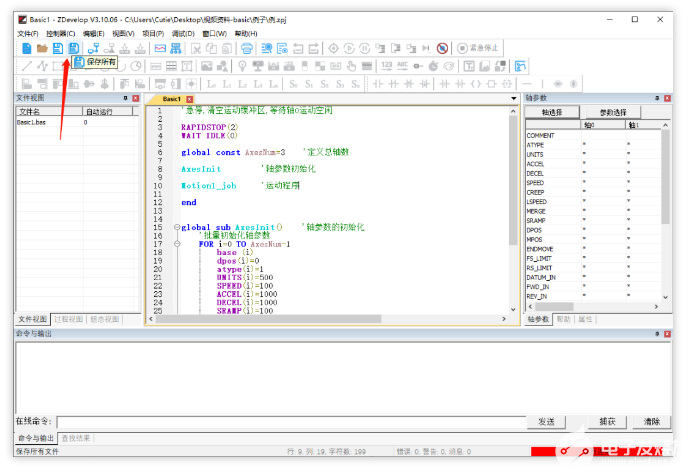
(4)編輯程序:程序編寫完成,點擊保存文件,防止編輯好的代碼丟失,新建的Basic文件會自動保存到項目“.zpj”所在的文件下。
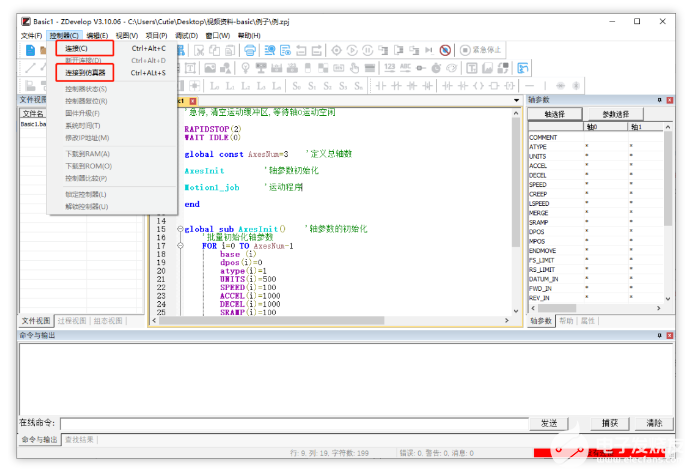
(5)連接到控制器:在程序輸入窗口編輯好程序,點擊“控制器”--“連接”,沒有控制器是可選擇連接到仿真器仿真運行,點擊“連接”--“連接到仿真器”。
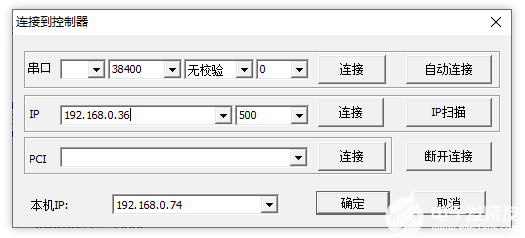
點擊“連接”彈出“連接到控制器”窗口,可選擇串口連接或網口連接,選擇匹配的串口參數或網口IP地址后,點擊連接即可。下圖為網口連接,控制器IP:192.168.0.36。
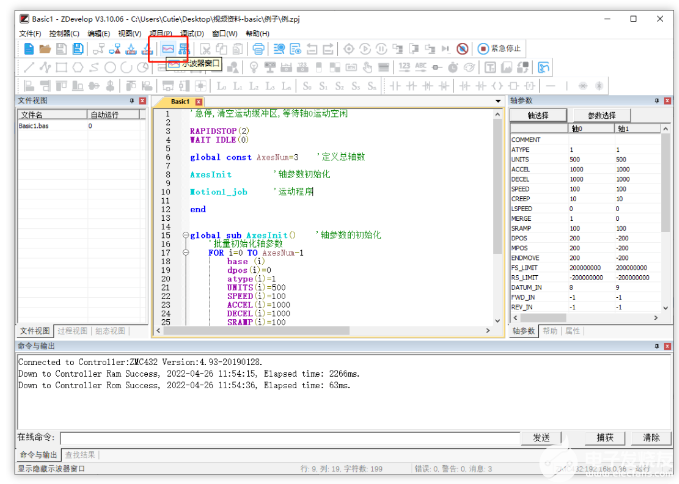
連接成功命令與輸出窗口打印信息:Connected to Controller:ZMC432 Version:4.93-20190128.若是新購買的XPLC006E系列控制器,連接IP填192.168.0.11(出廠默認IP地址),無論哪款控制器,基本操作都是相同的。
(6)下載程序:點擊菜單欄按鈕“下載到RAM”或按鈕“下載到ROM”,下載成功命令和輸出窗口會有提示,同時程序下載到控制器并自動運行。
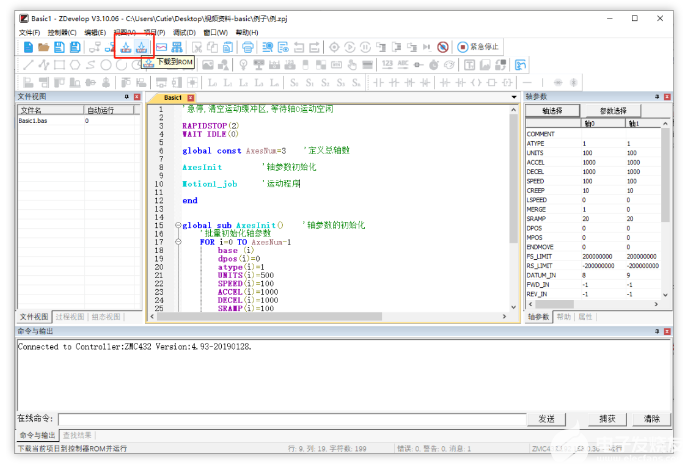
成功下載到RAM和成功下載到ROM的提示信息:
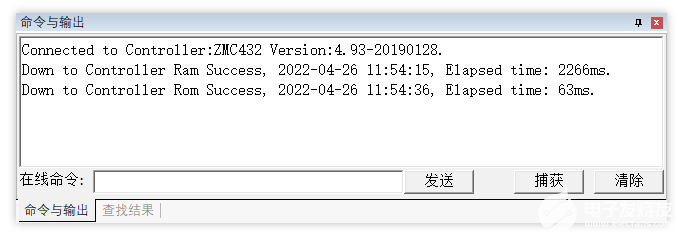
RAM下載掉電后程序不保存,ROM下載掉電后程序保存。下載到ROM的程序下次連接上控制器之后程序會自動按照任務號運行。
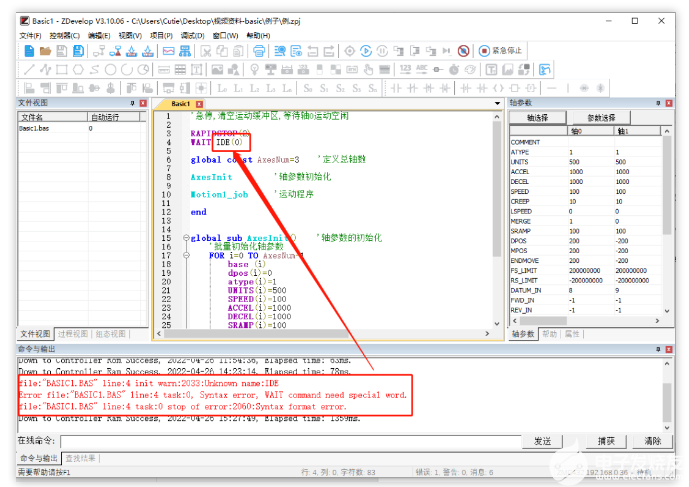
注意:當打印窗口提示紅色報警信息error時,程序無法正常運行,如下圖,指令錯誤報錯。
三 程序運行查看
1.啟動調試:點擊菜單欄“調試”-“啟動/停止調試”調用任務與監視窗口。
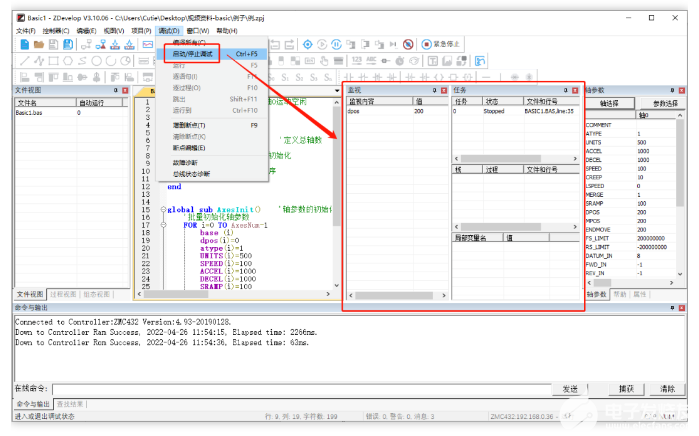
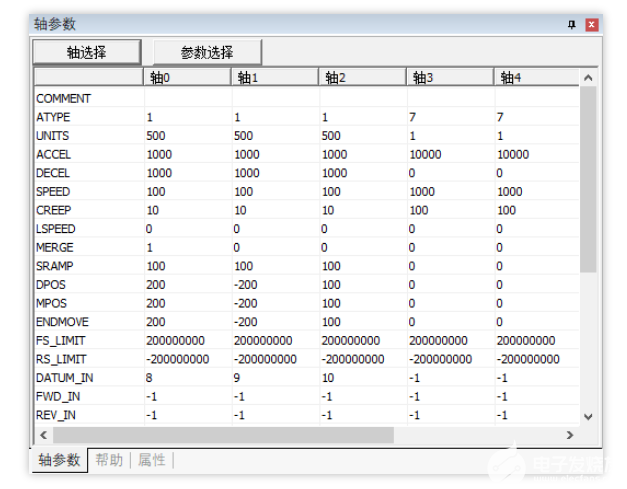
任務窗口用于查看多任務的運行狀態以及任務行號,監視窗口用于監控軸參數、自定義變量、輸入輸出狀態等信息。
2.軸參數查看:軸參數窗口是個非常重要的工具,能幫助用戶快速獲知大量軸參數的當前數據,觀察程序運行是否異常。詳情參見ZDevelop幫助手冊軸參數窗口的描述。
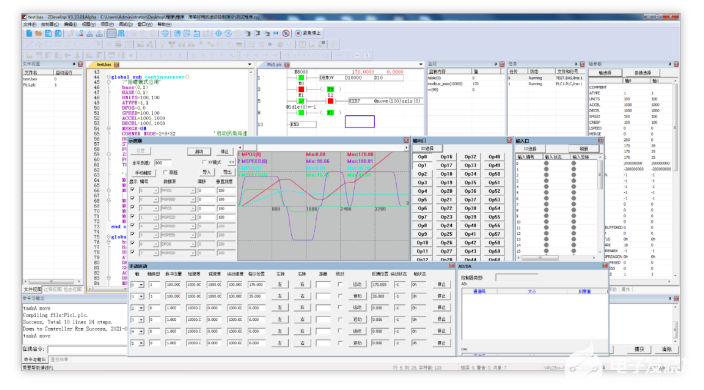
3.示波器采樣:在菜單欄“視圖”
--
“示波器”打開示波器窗口,或快捷按鈕,如下圖。
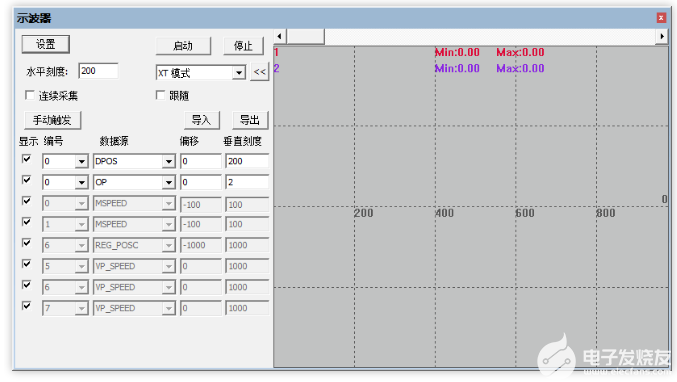
打開“設置”選擇要采集的通道數、深度、間隔等參數后確認,這里選擇采樣三個通道,分別為軸0軸1軸2的DPOS,設置完成點擊“啟動”按鈕。
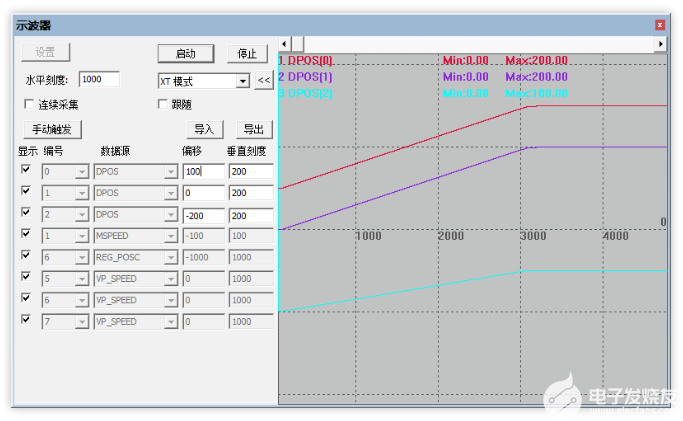
程序中寫入TRIGGER指令觸發示波器采樣(或者點擊手動觸發按鈕),執行運動程序后,采樣出如下波形數據。
(1)波形顯示有三種模式可選
A.XT模式:各個數據源的值隨時間變化的曲線。
B.XY模式(2D模式):兩軸的合成插補軌跡。
C.XYZ模式(3D模式):三軸在空間的合成插補軌跡。
(2)插補功能說明
XPLC006E控制器自帶6個軸,支持2-6軸聯合插補,相對應的需要設置2-6個軸的軸參數,運動前先選擇軸號,再發送插補命令,這樣操作插補命令不會發錯軸。
(3)六軸直線插補
BASE(0,1,2,3,4,5) '選擇軸號,需要哪幾個軸運動就選擇哪幾個
MOVE(200,200,100,80,75,100) '發送直線插補命令
4.進行三軸直線插補運動和監控示波器多種運行模式的軌跡。
(1)編寫三軸直線插補運動程序
'急停,清空運動緩沖區,等待軸0運動空閑
RAPIDSTOP(2)
WAIT IDLE(0)
GLOBAL CONST AxesNum=3 '定義總軸數
AxesInit '軸參數初始化
Motion1_job '運動程序
END '主程序結束
GLOBAL SUB AxesInit() '軸參數的初始化子函數
FOR i=0 TO AxesNum-1 '批量初始化軸參數
BASE(i)
DPOS(i)=0
ATYPE(i)=1
UNITS(i)=500
SPEED(i)=100
ACCEL(i)=1000
DECEL(i)=1000
SRAMP(i)=100
NEXT
END SUB
GLOBAL SUB Motion1_job()
TRIGGER ' 觸發示波器采樣
BASE(0,1,2)
MOVE(200,200,100) '三軸直線插補
END SUB
(2)示波器XT模式下的運行軌跡
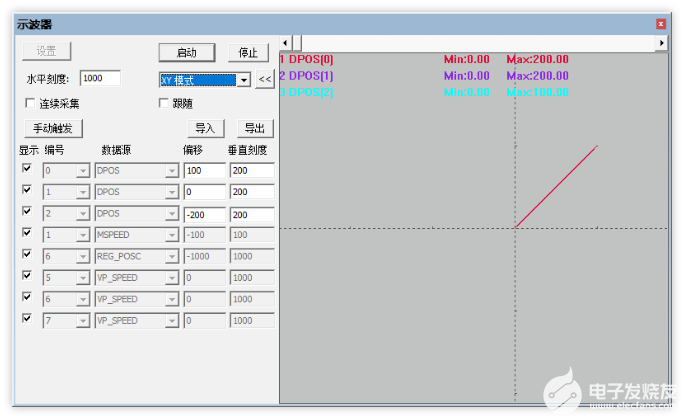
(3)示波器XY模式下的運行軌跡
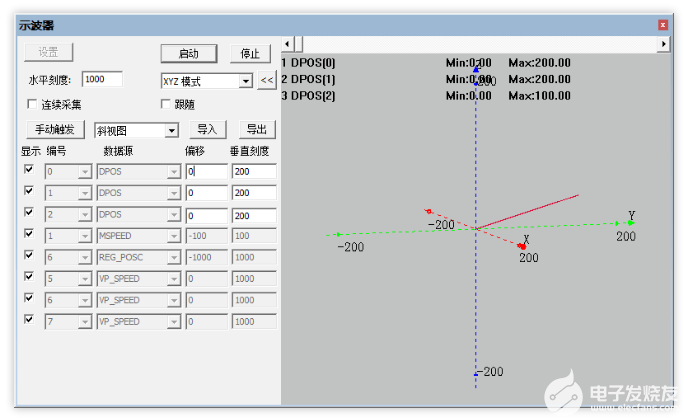
(4)示波器XYZ模式下的運行軌跡
本次,正運動技術經濟型EtherCAT運動控制器(二):ZBasic實現多軸直線插補運動,就分享到這里。
審核編輯:湯梓紅
-
運動控制器
+關注
關注
2文章
401瀏覽量
24706 -
Basics
+關注
關注
0文章
7瀏覽量
10392 -
ethercat
+關注
關注
18文章
686瀏覽量
38677
發布評論請先 登錄
相關推薦
MCU編程語言和開發環境介紹



cpu控制器負責什么運算
cpu控制器的主要作用是什么
cpu控制器的功能是什么
組合邏輯控制器與微程序控制器各有什么特點?
PID控制器與PWM控制器的區別
EtherCAT運動控制器在ROS上的應用開發案例(上)






 工商網監
工商網監
評論