") ZYNQ:使用PL將任務(wù)從PS加載到PL端
ZYNQ:使用PL將任務(wù)從PS加載到PL端
之前的幾篇文章主要集中在 Zynq SoC 的處理系統(tǒng) (PS) 方面,包括:
然而,從設(shè)計角度來看,Zynq SoC 真正令人興奮的方面是創(chuàng)建一個使用 Zynq 可編程邏輯 (PL) 的應(yīng)用程序。使用 PL 將任務(wù)從 PS 加載到 PL 端,為其他任務(wù)回收處理器帶寬從而加速任務(wù)。此外,PS 端可以控制 PL 端在經(jīng)典的片上系統(tǒng)應(yīng)用中執(zhí)行的操作。使用 Zynq SoC 的 PL 端可以提高系統(tǒng)性能、降低功耗并為實時事件提供可預(yù)測的延遲。
簡介
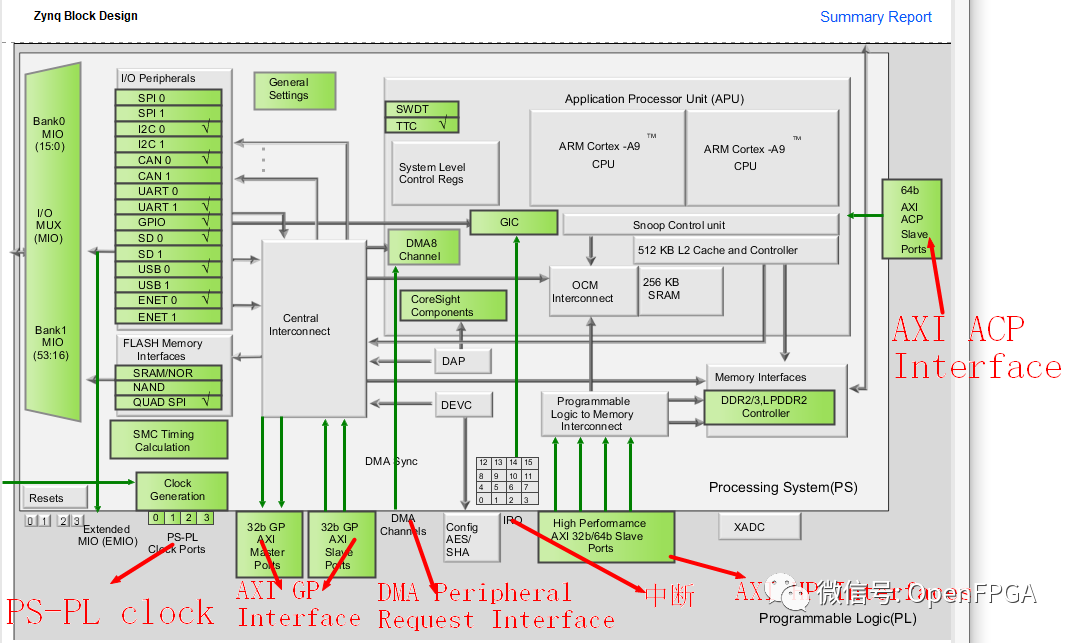
Zynq PS 和 PL 通過以下接口互連:
- 兩個 32 位主 AXI 端口(PS 主)
- 兩個 32 位從 AXI 端口(PL 主)
- 四個 32/64 位從機高性能端口(PL 主機)
- 1 個 64 位從加速器一致性端口 (ACP)(PL 主控)
- 從 PS 到 PL 的四個時鐘
- PS 到 PL 中斷
- PL 到 PS 中斷
- DMA 外設(shè)請求接口
以下是說明這些不同接口點的框圖:
ARM 的 AXI 是一種面向突發(fā)的協(xié)議,旨在提供高帶寬同時提供低延遲。每個 AXI 端口都包含獨立的讀寫通道。要求不高的接口使用的 AXI 協(xié)議的一個版本是 AXI4-Lite,它是一種更簡單的協(xié)議,可用于寄存器式控制/狀態(tài)接口。例如,Zynq XADC 使用 AXI4-Lite 接口連接到 Zynq PS。有關(guān) AXI 協(xié)議的更多信息,請訪問:
http://www.arm.com/products/system-ip/amba/amba-open-specifications.php
Zynq SoC 支持三種不同的 AXI 傳輸類型,可以使用它們來連接PS到設(shè)備的PL端:
- AXI4 Burst transfers
- AXI4-Lite for simple control interfaces
- AXI4-Streaming for unidirectional data transfers
下表定義了每個接口的理論帶寬:

必須使用 Zynq SoC 的 DMA 控制器才能達到上表中列出的最大速度。作為一個額外的好處,當(dāng) PS 是主機時,DMA 控制器減少了 Zynq SoC 的 ARM Cortex-A9 MPCore 處理器的負載。在不使用 DMA 控制器的情況下,從 PS 到 PL 端的最大傳輸速率為 25Mbytes/sec。
總而言之,在 PS 和 PL 之間使用了驚人的 14.4Gbytes/sec(115.2Gbits/sec)的理論帶寬!
創(chuàng)建AXI外設(shè)
這一節(jié)將使用 AXI 接口在 Zynq SoC 的可編程邏輯結(jié)構(gòu)中創(chuàng)建外設(shè)。
第一步
第一步是打開 Vivado 設(shè)計并從工具選項下選擇“創(chuàng)建和封裝 IP”選項-create and package IP。
這將打開一個對話框,允許創(chuàng)建 AXI4 外設(shè)。對話框的第一個實際頁面提供了許多選項,用于創(chuàng)建新 IP 或?qū)?dāng)前設(shè)計或目錄轉(zhuǎn)換為 IP 模塊。
選擇“創(chuàng)建新的 AXI4 外設(shè) - Create new AXI4 peripheral”選項并將其指向預(yù)定義的 IP 位置。可以使用 Vivado 主頁上的管理 IP 部分創(chuàng)建新的 IP 位置。

然后,該對話框允許輸入要用于新外圍設(shè)備的庫、名稱、描述和公司 URL。對于這個非常簡單的示例(稍后我將對其進行擴展)。
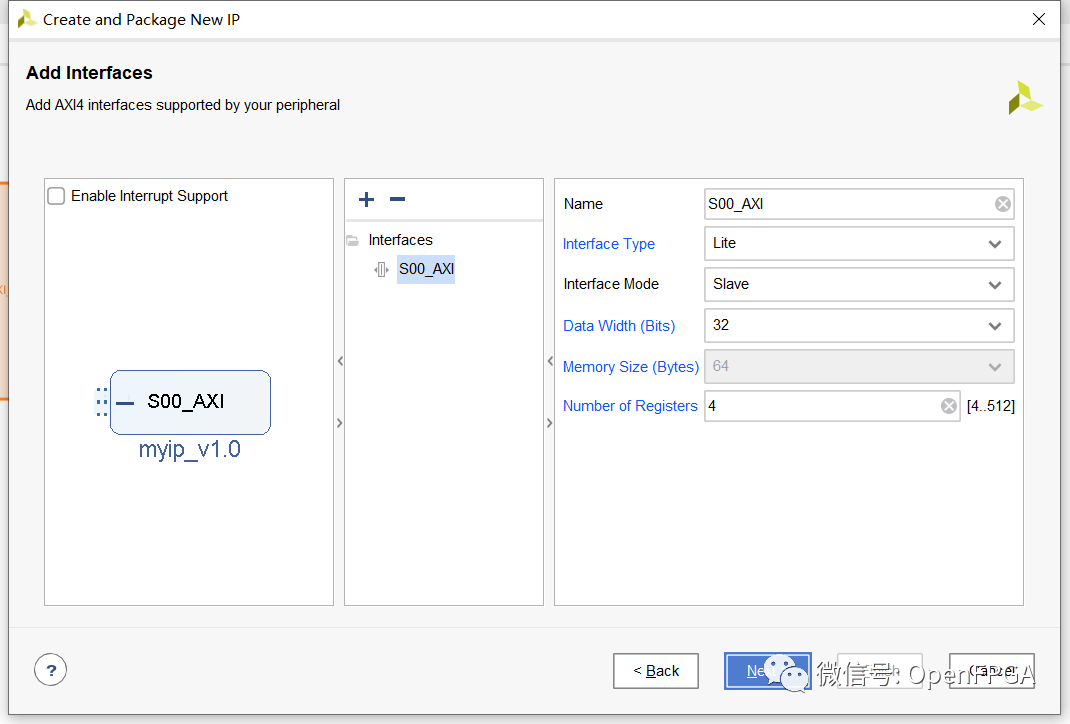
下面的對話框是一個功能強大的對話框,我們可以在其中定義我們希望指定的 AXI4 接口類型:
- 主或從
- 接口類型 – Lite、Streaming 或 Burst
- 總線寬度 32 或 64 位
- 內(nèi)存大小
- 寄存器數(shù)量
這個初始示例非常簡單,以便我可以演示創(chuàng)建外設(shè)所需的流程,在 Vivado 中實現(xiàn)它,然后將其導(dǎo)出到 SDK。出于這個原因,我將只有四個寄存器的 AXI4-L ite 接口,然后我們可以使用軟件對其進行尋址。這些寄存器可用于控制設(shè)計的可編程邏輯方面的功能操作。
最后的“創(chuàng)建外圍設(shè)備-create peripheral”對話框允許選擇一個選項來為新外圍設(shè)備生成驅(qū)動程序文件。這是一個重要的步驟,因為它將使外設(shè)與 SDK 的使用更加簡單。
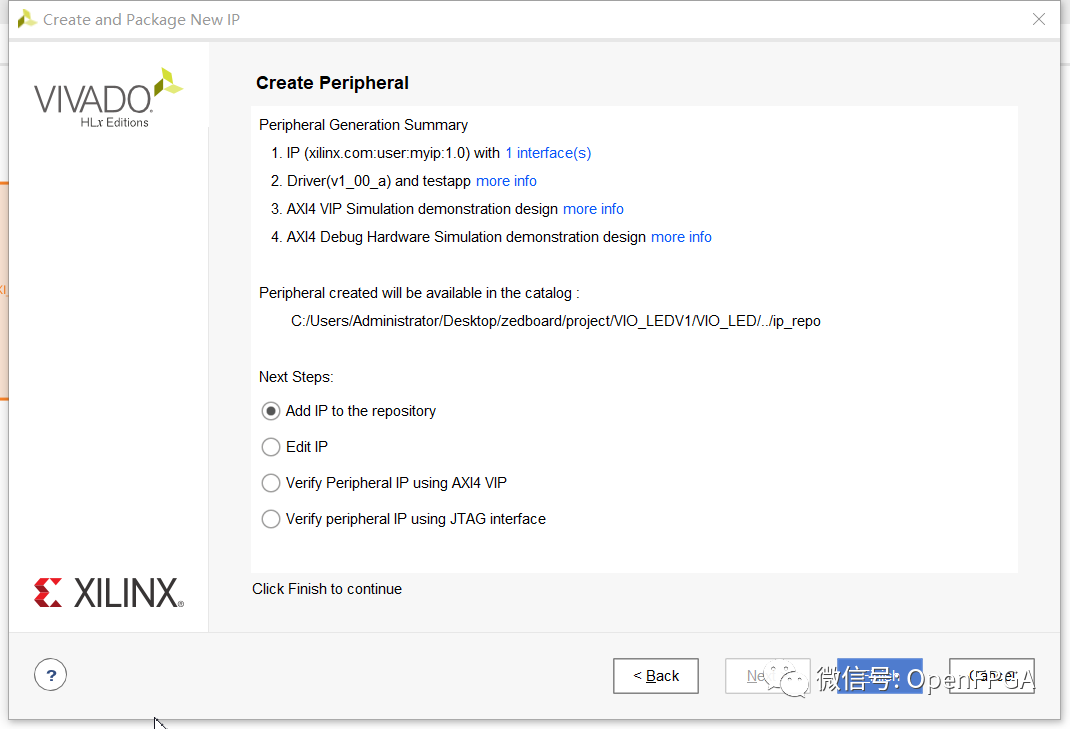
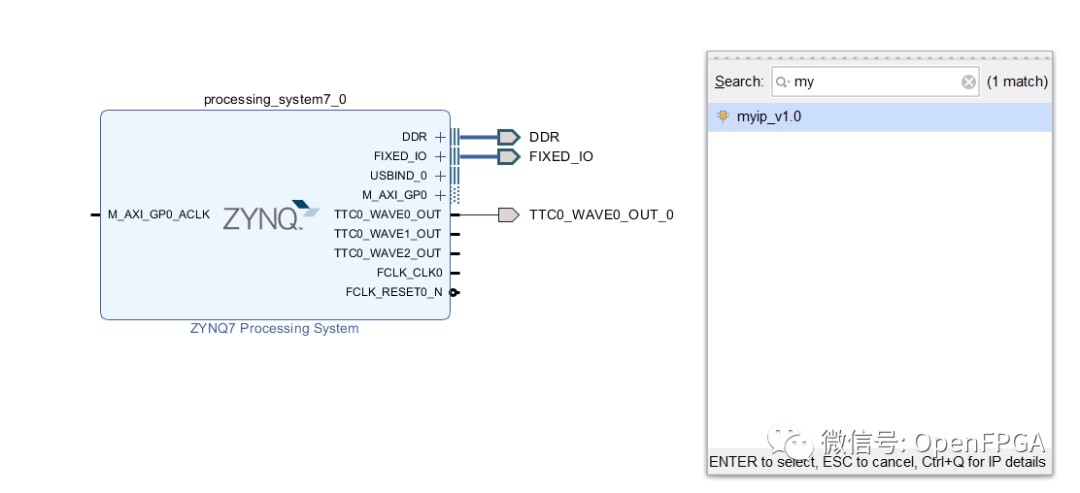
一旦“Create Peripheral”向?qū)шP(guān)閉,可以打開創(chuàng)建的 VHDL 文件并添加自定義硬件設(shè)計以在 PL 中執(zhí)行想要的功能。我將只使用我們創(chuàng)建的四個寄存器,因此可以不編輯文件。創(chuàng)建了外圍設(shè)備后,我們希望在 Vivado 設(shè)計中連接和使用它。這樣做非常簡單。我們打開系統(tǒng)框圖并從左側(cè)菜單中選擇添加 IP 選項。應(yīng)該能夠找到在此菜單中創(chuàng)建的外圍設(shè)備。可用外圍設(shè)備按字母順序列出。
第二步
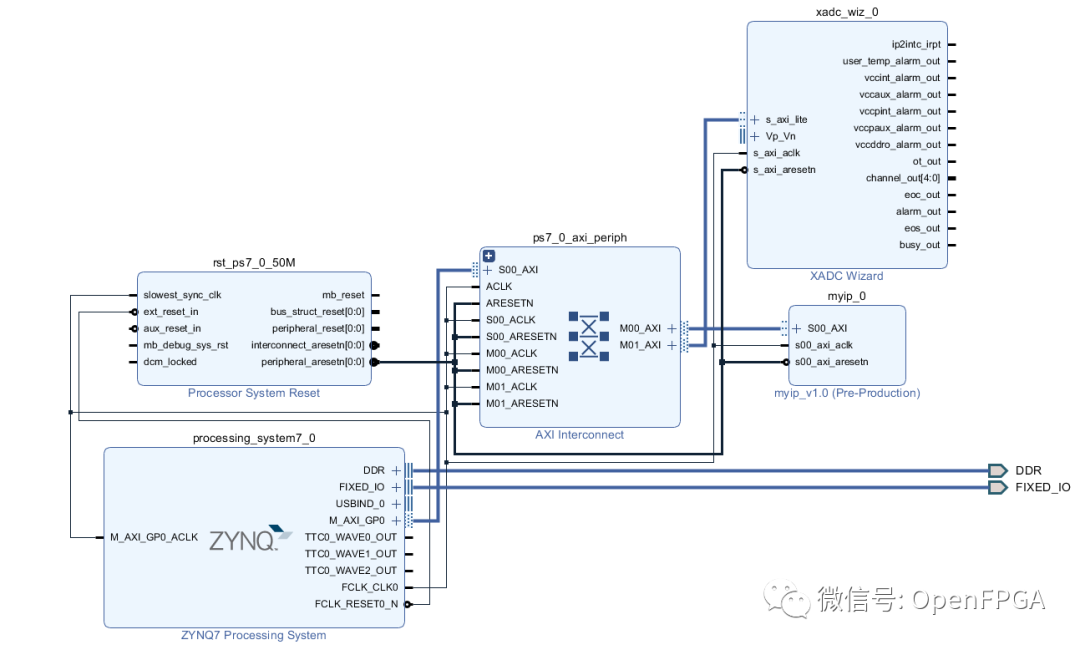
將此 IP 模塊拖入設(shè)計中,然后將其連接到 AXI GP 總線,其中 Vivado 提供運行連接自動化工具。
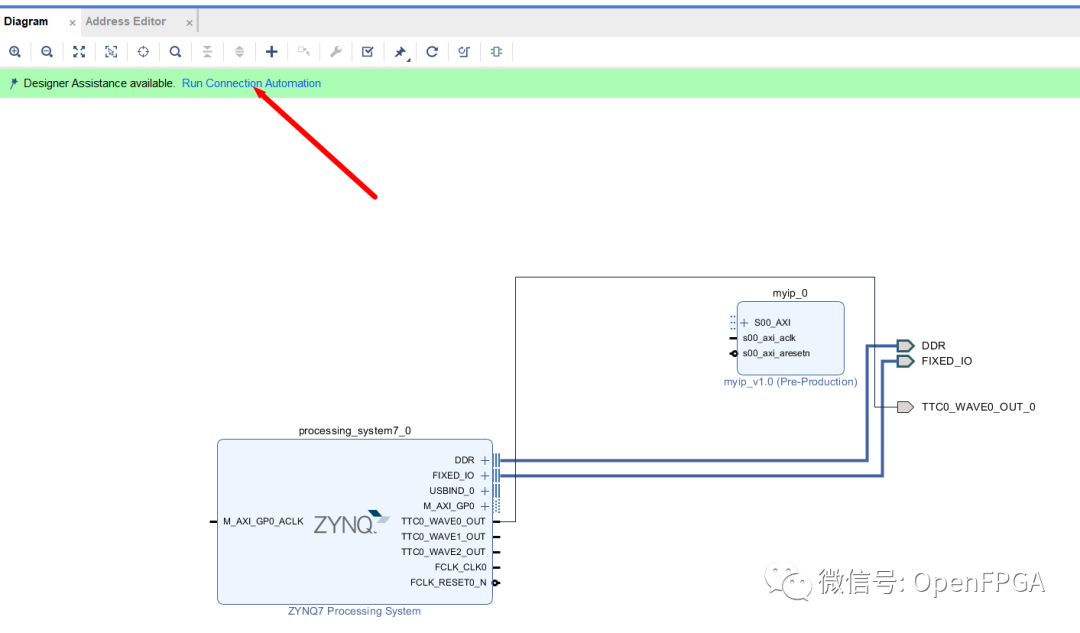
運行該工具會產(chǎn)生我們可以實施的設(shè)計。
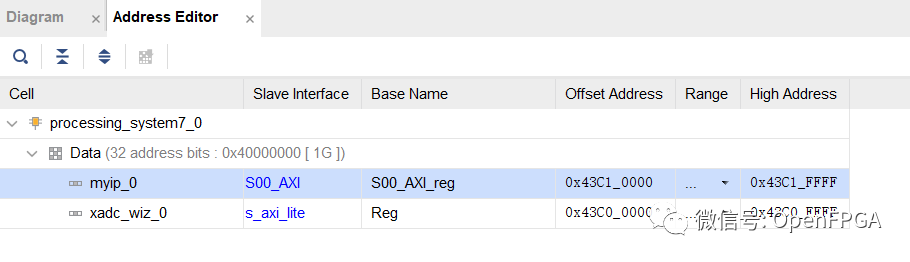
可以通過單擊地址編輯器選項卡來修改外設(shè)的地址范圍。請注意,4k 地址空間是允許的最小地址空間,這對于我們的 4 寄存器示例來說過于慷慨了。幸運的是,Zynq SoC 中的 ARM Cortex-A9 MPCore 處理器擁有大量的地址空間。
一旦 Vivado 自動完成連接及地址空間分配完畢,如下圖所示,我們就可以實現(xiàn)設(shè)計并將其導(dǎo)出到 SDK。然后我們就可以開始使用我們的外圍設(shè)備了。
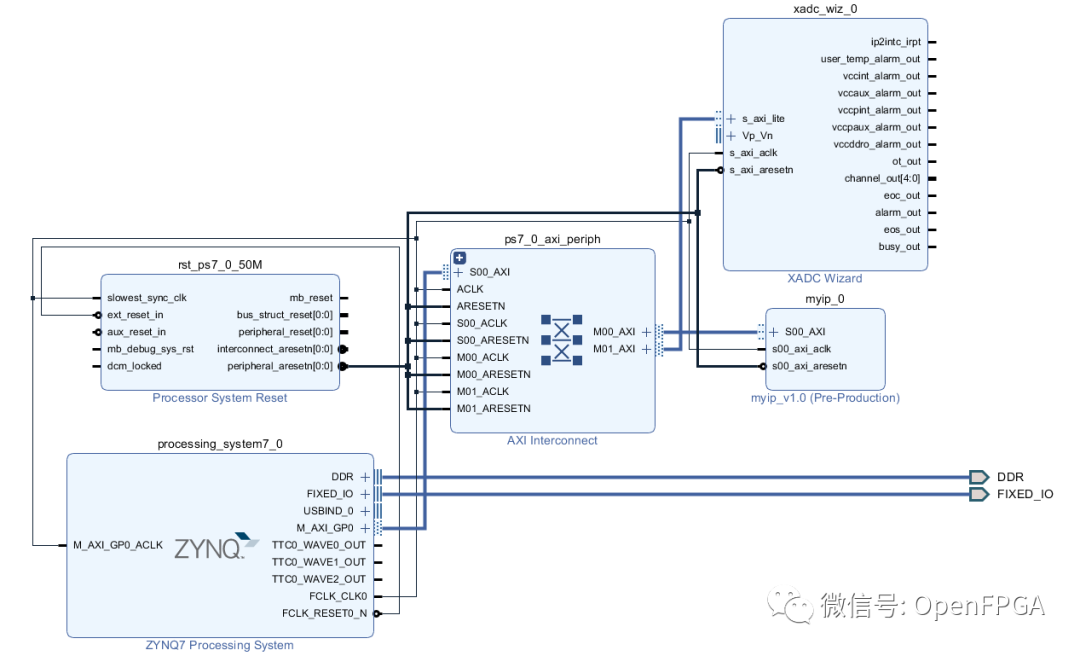
注意,可以檢查實施報告以確保包含已創(chuàng)建的外圍設(shè)備。
驗證
上面我們已經(jīng)產(chǎn)生了一個AXI外設(shè),接下來就是在SDK中驗證這個外設(shè)的正確性。
使用 Vivado 創(chuàng)建 AXI4 外設(shè)并生成BIN文件。
創(chuàng)建了設(shè)計的硬件組件后,我們現(xiàn)在需要將其導(dǎo)出到我們的 SDK 設(shè)計中,以便我們可以編寫軟件來驅(qū)動它。第一步是在 Vivado 中打開當(dāng)前工程,編譯生成BIN文件,然后將硬件導(dǎo)出到 SDK。(如果嘗試導(dǎo)出硬件時,SDK 已在使用中,則會收到警告。)如果不將硬件導(dǎo)出到 SDK,則下次打開 SDK 時,需要將硬件定義和板級支持包更新,否則將無法使用它們。還需要更新設(shè)計中定義的存儲庫,以包括包含外圍設(shè)備的 IP 存儲庫。
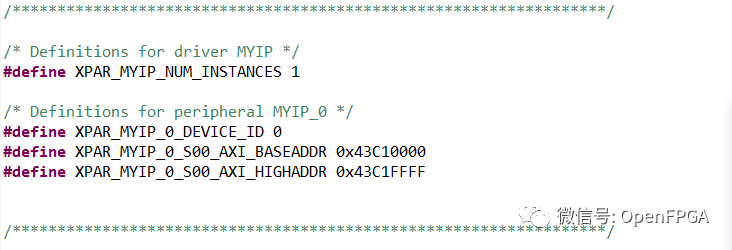
打開 xparameters.h 文件(在 BSP 包含文件中)以查看專用于新 AXI4 外設(shè)的地址空間:
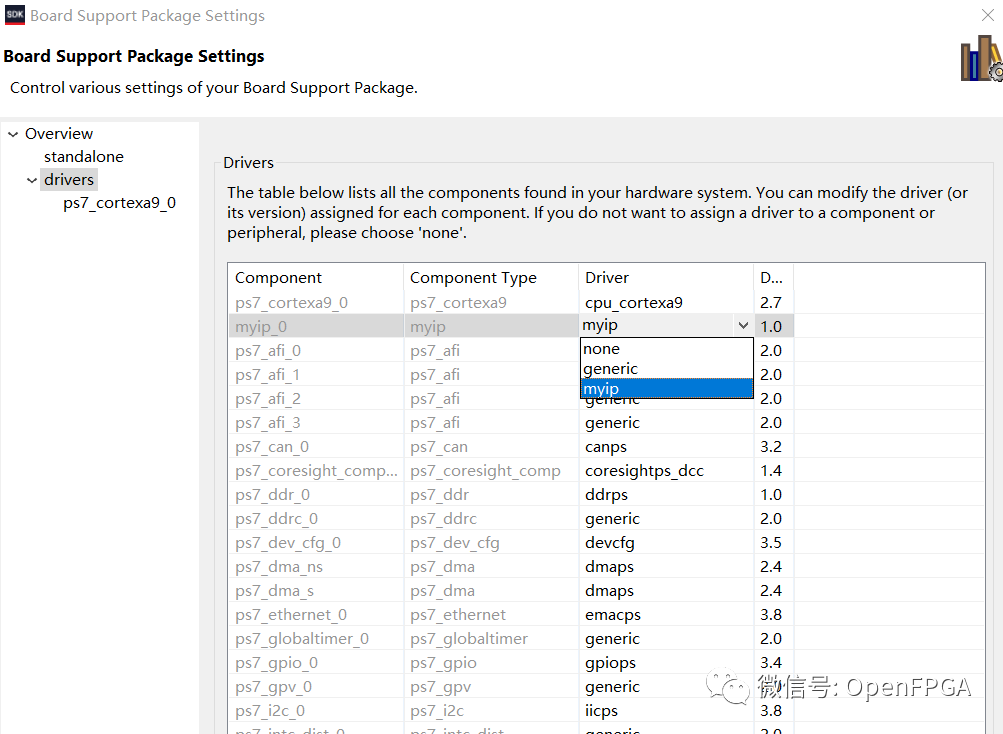
下一步是打開 System.MSS 文件并自定義要使用的 BSP在外設(shè)創(chuàng)建過程中生成的驅(qū)動程序而不是通用驅(qū)動程序。
重新構(gòu)建項目可確保將驅(qū)動程序文件加載到 BSP 中。這是一個非常有用的步驟,因為這些文件還包含一個簡單的自檢程序,可以使用該程序來測試外設(shè)的軟件接口是否正確,然后再開始使用它進行更高級的操作。使用此測試程序還表明我們已在 Vivado 中正確實例化了硬件。
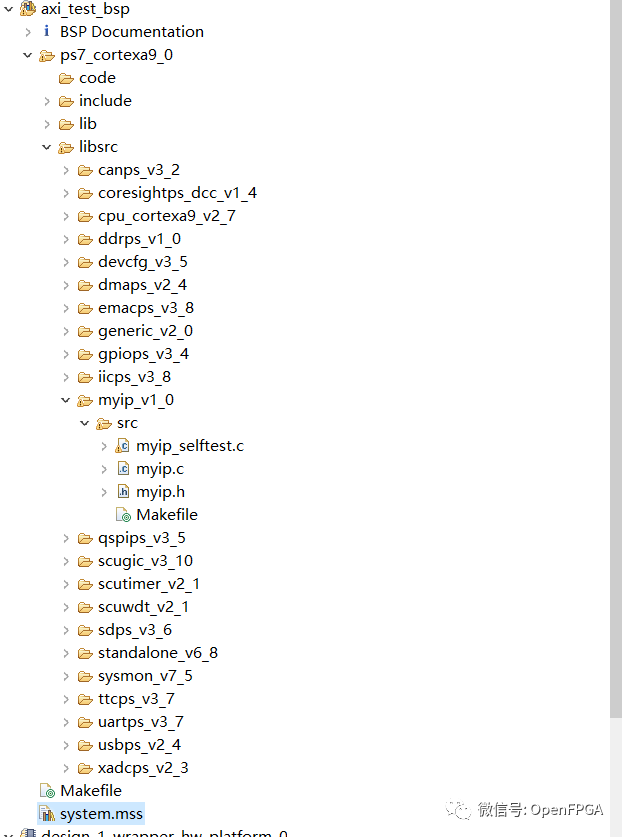
在 BSP 下 libsrc 中,將看到許多新 AXI4 外設(shè)的文件。這些文件允許像使用原生外圍設(shè)備(例如 XADC 和 GPIO)一樣讀取和寫入外圍設(shè)備,我們之前在其他文章中一直在使用它們。
對于這個簡單的示例,文件 myip.h 包含我們可以用來驅(qū)動新外設(shè)的三個函數(shù)。
-
MYIP_mReadReg(BaseAddress, RegOffset)
-
MYIP_mWriteReg(BaseAddress, RegOffset, Data)
-
XStatus MYIP_Reg_SelfTest( void * baseaddr_p);
除自檢功能外,讀取和寫入功能都映射到通用函數(shù) Xil_In32 和 Xil_Out32,它們在 Xil_io.h 中定義。然而,使用創(chuàng)建的函數(shù)可以使代碼更具可讀性,因為被尋址的外設(shè)非常清晰。
對于這個例子,我們在外設(shè)中只有四個寄存器,所以我們將只使用自檢,它將寫入和讀取所有寄存器并報告通過或失敗。這個測試讓我們相信我們已經(jīng)獲得了正確的硬件和軟件環(huán)境,一旦我們在外圍模塊中定義了它們,我們就可以繼續(xù)使用更高級的功能。在下一篇文章中,我們將研究如何使用 HDL 代碼向外設(shè)添加一些功能,以從處理系統(tǒng)中卸載功能并提高系統(tǒng)性能。
利用XADC進行復(fù)雜運算
假設(shè)我們想在 Zynq 中執(zhí)行更復(fù)雜的計算,例如針對工業(yè)控制系統(tǒng)。通常,這些系統(tǒng)將具有多個模擬輸入(通過 ADC),由熱敏電阻、熱電偶、壓力傳感器、鉑電阻溫度計 (PRT) 等傳感器驅(qū)動。
很多時候,來自這些傳感器的數(shù)據(jù)需要傳遞函數(shù)來將來自 ADC 的原始數(shù)據(jù)值轉(zhuǎn)換為可用于進一步處理的數(shù)據(jù)。一個很好的例子是 Zynq XADC,它在 XADCPS.h 中包含許多函數(shù)/宏,用于將原始 XADC 值轉(zhuǎn)換為電壓或溫度。但是,這些轉(zhuǎn)換非常簡單。假如這些計算變得越復(fù)雜,則需要 Zynq 處理時間就越多。如果使用 Zynq SoC 的可編程邏輯 (PL) 端來執(zhí)行這些計算,則可以大大加快計算速度。附帶的好處是,處理器還可以騰出時間來執(zhí)行其他軟件任務(wù),因此可以通過使用 PL 進行計算來提高處理帶寬。
傳遞函數(shù)越復(fù)雜,計算結(jié)果所需的處理器時間就越多。我們可以使用以millibars為單位的大氣壓力轉(zhuǎn)換為以米(meters)為單位的高度的示例來演示這種轉(zhuǎn)換。下面的傳遞函數(shù)給出了壓力在 0 到 10 millibars之間的海拔高度:
使用 Zynq SoC 的處理系統(tǒng) (PS) Zynq 實現(xiàn)這個傳遞函數(shù)非常簡單,使用下面的代碼行,其中“結(jié)果-result”是一個浮點數(shù);a、b 和 c 是上述傳遞函數(shù)中定義的常數(shù);i 是輸入值
result=((float)a*(i*i))+((float)b*(i))+(float)c;
對于這個例子,我將使用嵌套在“for”循環(huán)中的代碼來模擬上面輸入值中的步驟。代碼通過 STDOUT 輸出結(jié)果。因為我要計算執(zhí)行這個計算所需的時間,我將使用私有計時器來確定這個時間,如下:
for(i=0.0;i<10.0;?i?=?i?+0.1?){
???????XScuTimer_LoadTimer(&Timer,?TIMER_LOAD_VALUE);
???????timer_start?=?XScuTimer_GetCounterValue(&Timer);
???????XScuTimer_Start(&Timer);
???????result?=?((float)a*(i*i))+((float)b*(i))+(float)c;
XScuTimer_Stop(&Timer);
timer_value=XScuTimer_GetCounterValue(&Timer);
printf("%f,%f,%lu,%lu,
",i,result,timer_start,timer_value);
}
雖然此代碼可能無法提供最準(zhǔn)確的時序參考,但足以證明我們研究的原理。在Zynq板上運行上述代碼,在終端窗口中獲得了以下結(jié)果。注意:
對此輸出進行一些簡單的分析表明,計算結(jié)果平均需要 25 個 CPU_3x2x 時鐘周期。。使用 666MHz 處理器時鐘,此計算需要 76 ns。我相信很多人會看到ADC輸出不是浮點數(shù)而是一個定點數(shù)。使用整數(shù)數(shù)學(xué)重寫函數(shù)代碼導(dǎo)致時鐘周期的平均數(shù)非常相似。但是我認為對于這個例子,浮點數(shù)會更容易使用,并且不需要解釋定點數(shù)系統(tǒng)背后的原理。
在確定了 Zynq 的 PS 端執(zhí)行中等復(fù)雜度傳遞函數(shù)需要多長時間的基準(zhǔn)之后,我們下一次可以看看當(dāng)我們將相同的函數(shù)轉(zhuǎn)移到設(shè)備的 PL 端時,我們能以多快的速度計算這個函數(shù)。
定點數(shù)工作原理
上一節(jié)我們使用PS計算了一個公式,接下來我們將使用PL端加速這一公式計算,但是PL端的特點是只能進行定點計算,所以這一小節(jié)我們將說明一下定點數(shù)工作原理。
在數(shù)字系統(tǒng)中有兩種表示數(shù)字的方法:定點或浮點。定點表示將小數(shù)點保持在固定位置,這就大大簡化了算術(shù)運算。如圖所示,定點數(shù)由稱為整數(shù)和小數(shù)部分的兩部分組成:數(shù)字的整數(shù)部分在隱含小數(shù)點的左側(cè),小數(shù)部分在右側(cè)。

上述定點數(shù)能夠使用二進制補碼表示表示介于 0.0 和 255.9906375 之間的無符號數(shù)或介于 –128.9906375 和 127.9906375 之間的有符號數(shù)。
浮點數(shù)分為指數(shù)和尾數(shù)兩部分。浮點表示允許小數(shù)點根據(jù)值的大小在數(shù)字內(nèi)浮動。定點表示的主要缺點是要表示更大的數(shù)字或使用小數(shù)獲得更準(zhǔn)確的結(jié)果,需要更多的位。雖然 FPGA 可以同時支持定點數(shù)和浮點數(shù),但大多數(shù)應(yīng)用程序都采用定點數(shù)系統(tǒng),因為它們比浮點數(shù)系統(tǒng)更易于實現(xiàn)。
在設(shè)計中,我們可以選擇使用無符號或有符號數(shù)字。通常,選擇受到正在實施的算法的限制。無符號數(shù)可以表示 0 到 2n – 1 的范圍,并且始終表示正數(shù)。有符號數(shù)使用補碼數(shù)系統(tǒng)來表示正數(shù)和負數(shù)。二進制補碼系統(tǒng)允許通過簡單地將兩個數(shù)字相加來從另一個數(shù)字中減去一個數(shù)字。補碼數(shù)可以表示的范圍是:- (2n-1) ~ + (2n-1 – 1)
表示定點數(shù)內(nèi)整數(shù)位和小數(shù)位之間分割的正常方式是 x,y,其中 x 表示整數(shù)位的數(shù)量,y 表示小數(shù)位的數(shù)量。例如 8,8 代表 8 個整數(shù)位和 8 個小數(shù)位,而 16,0 代表 16 個整數(shù)和 0 個小數(shù)位。
在許多情況下,整數(shù)和小數(shù)位數(shù)將在設(shè)計時確定,這個時間通常在算法從浮點轉(zhuǎn)換之后。由于 FPGA 的靈活性,我們可以表示任意位長的定點數(shù);我們不僅限于 32、64 甚至 128 位寄存器。FPGA 對 15 位、37 位或 1024 位寄存器同樣適用。
所需整數(shù)位的數(shù)量取決于該數(shù)字需要存儲的最大整數(shù)值。小數(shù)位數(shù)取決于最終結(jié)果的所需精度。要確定所需的整數(shù)位數(shù),我們可以使用以下等式:

例如,表示 0.0 到 423.0 之間的值所需的整數(shù)位數(shù)是:
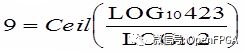
我們需要 9 個整數(shù)位,允許表示 0 到 511 的范圍.
兩個定點操作數(shù)的小數(shù)點必須對齊才能加、減或除這兩個數(shù)字。也就是說,一個 x,8 數(shù)字只能添加到、減去或除以同樣在 x,8 表示形式中的數(shù)字。要對不同 x,y 格式的數(shù)字執(zhí)行算術(shù)運算,我們必須首先對齊小數(shù)點。請注意,對齊除法的小數(shù)點并不是絕對必要的。但是,實現(xiàn)定點除法需要仔細考慮,以確保在這種情況下得到正確的結(jié)果。
同樣,兩個定點數(shù)相乘時,小數(shù)點也不需要對齊。例如,將兩個定點數(shù)相乘,格式為 14,2 和 10,6,結(jié)果為 24,8(格式為 24 個整數(shù)位和 8 個小數(shù)位)。對于除以固定常數(shù),我們當(dāng)然可以通過計算常數(shù)的倒數(shù)然后將該常數(shù)結(jié)果用作乘數(shù)來簡化設(shè)計。
PL加速PS端計算
上一節(jié)簡單說了PL端實現(xiàn)定點計算的一些基礎(chǔ)知識,接下來就是專注于在系統(tǒng)中實現(xiàn)PL端加速的工作。
在我們開始切割代碼之前,我們需要確定我們將在這個特定實現(xiàn)中使用的比例因子(小數(shù)點的位置)。在此示例中,輸入信號的范圍在 0 到 10 之間,因此我們可以將 4 個十進制位和 12 個小數(shù)位打包成一個 16 位輸入向量。
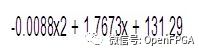
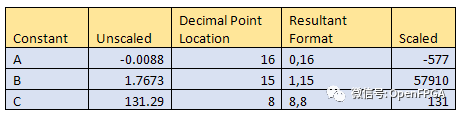
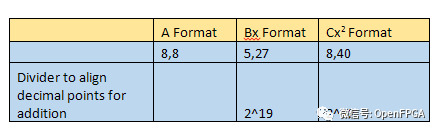
上面的公式就是我們要實現(xiàn)的,它具有三個常數(shù) A、B 和 C:A = -0.0088 B = 1.7673 C =131.29。我們需要在實現(xiàn)中處理(縮放)這些常數(shù)。在 FPGA 中這樣做的好處在于,我們可以對每個常數(shù)進行不同的縮放以優(yōu)化性能,如下表所示:
當(dāng)我們實現(xiàn)上述等式時,我們需要考慮合成向量的擴展,對于術(shù)語 Ax^2和 Bx 定義如下:
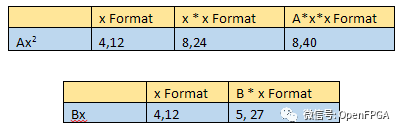
要使用常數(shù) C 執(zhí)行最終加法,我們需要對齊小數(shù)點。因此,我們需要將結(jié)果和 Ax^2和 Bx 除以 2 的冪,以將小數(shù)點與 C 對齊。result也將被格式化為這個值,即 8,8。
計算完上述內(nèi)容后,我們就準(zhǔn)備好在前幾節(jié)創(chuàng)建的 Vivado 外設(shè)工程中實施設(shè)計。
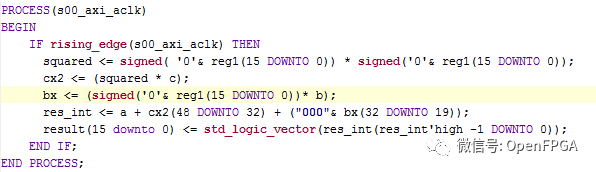
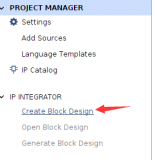
第一個實現(xiàn)步驟是在 Vivado 中打開框圖視圖,右鍵單擊IP,然后選擇“Edit in IP Packager”。一旦 IP Packager 在頂層文件中打開,我們就可以輕松實現(xiàn)一個簡單的過程,在多個時鐘周期內(nèi)執(zhí)行計算。(本示例中為五個時鐘,盡管可以進一步優(yōu)化。)
現(xiàn)在我們可以在將更新的硬件導(dǎo)出到 SDK 之前,在 Vivado 中重新打包和重建項目(記得更新版本號)。
在 SDK 中,我們可以使用與以前相同的方法,除了現(xiàn)在使用定點數(shù)字系統(tǒng)而不是前面示例中使用的浮點系統(tǒng):
for(i=0;i<2560;?i?=?i+25?){
???????XScuTimer_LoadTimer(&Timer,?TIMER_LOAD_VALUE);
???????timer_start?=?XScuTimer_GetCounterValue(&Timer);
???????XScuTimer_Start(&Timer);
???????ADAMS_PERIHPERAL_mWriteReg(Adam_Low,?4,?i);
???????result?=?ADAMS_PERIHPERAL_mReadReg(Adam_Low,?12);
???????XScuTimer_Stop(&Timer);
???????timer_value?=?XScuTimer_GetCounterValue(&Timer);
??????printf("%d,%lu,%lu,%lu,
",i,result,timer_start,timer_value);
}
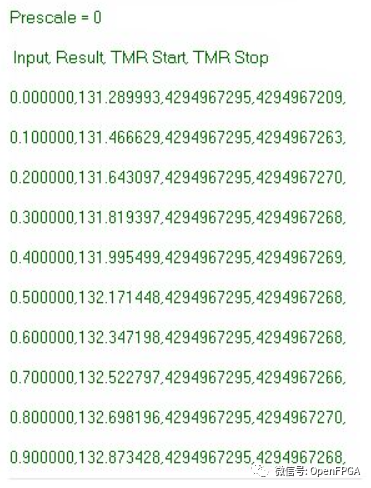
當(dāng)上面的代碼在ZYNQ板上運行時,我們在串行鏈路上看到以下結(jié)果輸出:
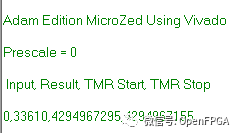
33610 的結(jié)果等于 131.289 除以 2^8 時,這是正確的并且符合浮點計算。盡管數(shù)值結(jié)果相同,但最大的區(qū)別在于執(zhí)行計算所需的時間。雖然外圍設(shè)計的實際計算只需要 5 個時鐘,但生成結(jié)果需要 140 個時鐘或 420ns,而在 Zynq SoC 的 PS 側(cè)使用 ARM Cortex-A9 處理器則需要 25 個 CPU 時鐘。
為什么會出現(xiàn)差異?PL端不應(yīng)該更快嗎?主要原因時外圍 I/O 時間開銷。在使用 PL 端時,我們必須考慮 AXI 總線上的總線延遲和 AXI 總線頻率,在此應(yīng)用中為 142.8MHz(請求為 150MHz)。AXI 總線開銷導(dǎo)致計算時間長于預(yù)期。然而,一切都沒有錯。錯的是我做錯了方向:因為這種 I/O 開銷時間,將任務(wù)轉(zhuǎn)移到 Zynq SoC 的 PL 并不是以這種方式使用的。
那么如果我們要采取更合理的方法,需要怎么做?DMA
下一篇文章我們將使用DMA來搬運數(shù)據(jù),看下結(jié)果是不是我們要的~~
本文部分源文件:
https://gitee.com/openfpga/zynq-chronicles/blob/master/VHDL_part24.vhd

審核編輯 :李倩
-
可編程邏輯
+關(guān)注
關(guān)注
7文章
515瀏覽量
44083 -
Zynq SoC
+關(guān)注
關(guān)注
0文章
6瀏覽量
3639
原文標(biāo)題:ZYNQ從放棄到入門(八)-PS和PL交互
文章出處:【微信號:Open_FPGA,微信公眾號:OpenFPGA】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
使用BQ76PL102系列電量計進行BQ78PL114的快速入門指南

bq78PL114系統(tǒng)設(shè)計指南
PICO-IMX8PL和SRG-IMX8PL:共創(chuàng)您的物聯(lián)網(wǎng)集成網(wǎng)關(guān)

復(fù)旦微PS+PL異構(gòu)多核開發(fā)案例分享,基于FMQL20SM國產(chǎn)處理器平臺
PL7518v1
FM20S用戶手冊-PS + PL異構(gòu)多核案例開發(fā)手冊
FM20S用戶手冊-PL端案例開發(fā)手冊
有關(guān)PL端利用AXI總線控制PS端DDR進行讀寫(從機wready信號一直不拉高)
簡談Xilinx Zynq-7000嵌入式系統(tǒng)設(shè)計與實現(xiàn)
AMD Versal AI Edge自適應(yīng)計算加速平臺之體驗ARM,裸機輸出(7)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論