") 如何快速搭建整車模型用于整車仿真、底盤控制和自動駕駛
如何快速搭建整車模型用于整車仿真、底盤控制和自動駕駛
MATLAB 在基于模型設(shè)計上的應(yīng)用已經(jīng)廣受認可。從 2016 年開始 MATLAB 推出了 Powertrain Blockset 用于車輛縱向動力學(xué)仿真,2018 年推出了 Vehicle Dynamic blockset 用于車輛整車動力學(xué)建模仿真,幫助工程師快速搭建整車模型,并結(jié)合整車、底盤控制器以及自動駕駛場景、算法,完成了構(gòu)建虛擬整車模型的工具鏈。
下面我們將以模型案例講解如何快速搭建整車模型用于整車仿真、底盤控制和自動駕駛?以及在建模過程中各個組件的參數(shù)含義。
比如,我們需要驗證一個純電動汽車 AEB 功能的模型。這就需要一個能體現(xiàn)純電動汽車整車動力學(xué)性能的模型。如何搭建車輛的物理模型呢?同時又要如何搭建整車 VCU 模型呢?
我們以這個下面鏈接的這個模型來講解如何一步步搭建純電動汽車 AEB 仿真測試模型。
本系列會分為 5 個步驟:
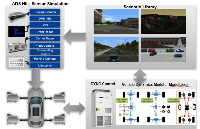
Step1:
基于 Reference Application,選取合適的整車模型,為接下來自定義打下框架。
Step2:
自定義車輛傳動系統(tǒng)模型及整車能量管理策略。
Step3:
構(gòu)建車輛車體、輪胎、懸架模型完成 14 自由度的整車模型。
Step4:
根據(jù)需求增加車輛底盤控制器模型,如 ABS 控制器。并進行整車仿真。
Step5:
自定義自動駕駛運行場景,如 AEB 法規(guī)場景,查看車輛的系統(tǒng)響應(yīng)。
MATLAB
Step3
——自定義車輛車體、輪胎、懸架模型——
自定義車輛傳動系統(tǒng)及控制器模型后,Reference Applications中的雙移線模型已經(jīng)被改成了純電動汽車雙移線的模型。
為了深度理解車輛動力學(xué)響應(yīng),我們需要查看車輛底盤、懸架、轉(zhuǎn)向等模塊的建模原理及參數(shù)設(shè)置。
不同于車輛縱向動力學(xué),只有一個自由度的車身,車輛整體動力學(xué)需要體現(xiàn)車輛的縱向、垂向和側(cè)向動力學(xué)特性。建模難度也大幅增高。
整車建模方法總體上可以分為兩類,
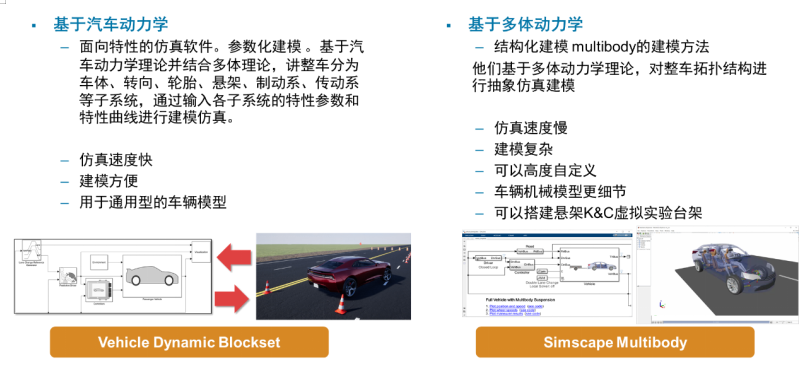
一類是參數(shù)化建模,基于汽車動力學(xué)方程。一類是結(jié)構(gòu)化建模,基于多體動力學(xué)方程。
對于這兩種方法,MATLAB 都提供相應(yīng)的工具箱支持。
基于多體動力學(xué)進行整車建模,需要輸入車輛懸架、轉(zhuǎn)向、輪胎準確的幾何位置信息,基于拓撲結(jié)構(gòu)進行抽象建模。過程比較復(fù)雜。但是更適合于懸架設(shè)計相關(guān)的工作。
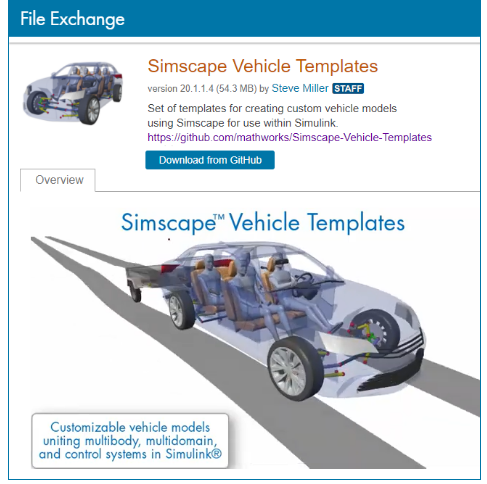
Mathworks的Simscape Multibody 推出了 Vehicle Template 模型,可以大大簡化這一過程。用戶可以在模型中設(shè)定的用戶界面上進行參數(shù)化設(shè)定,即可搭建懸架、車身模型等。
以下鏈接下載 Vehicle Template 模型:
https://www.mathworks.com/matlabcentral/fileexchange/79484-simscape-vehicle-templates
仿真結(jié)果的 3D 顯示如下
由于參數(shù)化車輛模型運算速度快、建模方便等特點,更適合用于整車建模并支持 HIL ,我們接下來重點講解參數(shù)化車輛建模的過程。
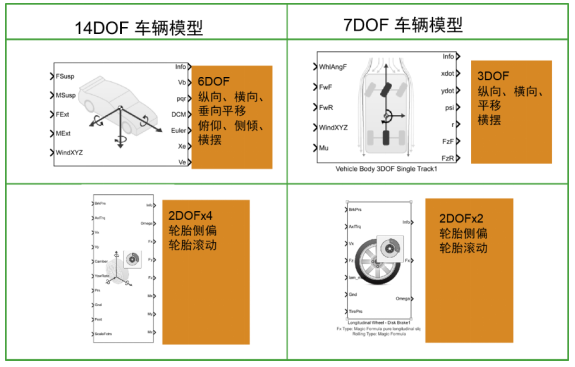
要點1. 整車模型
Vehicle Dynamic Bloicket 提供的整車模型有兩個選擇。一個是 14 自由度車輛模型,一個是 7 自由度車輛模型。其中 7 自由度車輛模型自行車模型,包含 3 個自由度的車體模型(縱向、橫向、轉(zhuǎn)向),以及 2 個自由度的輪胎模型(滾動、側(cè)偏)。該車輛模型不能體現(xiàn)車輛的垂向特性,不含懸架模型。可以用于車輛橫向動力學(xué)仿真的場景,如自動駕駛、底盤控制等。
14 自由度車輛模型更為完整地反映出車輛完整的動力學(xué)特性,包含車輛的垂向特性,車體含 6 個自由度,輪胎依然是2自由度輪胎。
要點2.傳動系統(tǒng)部件的建模
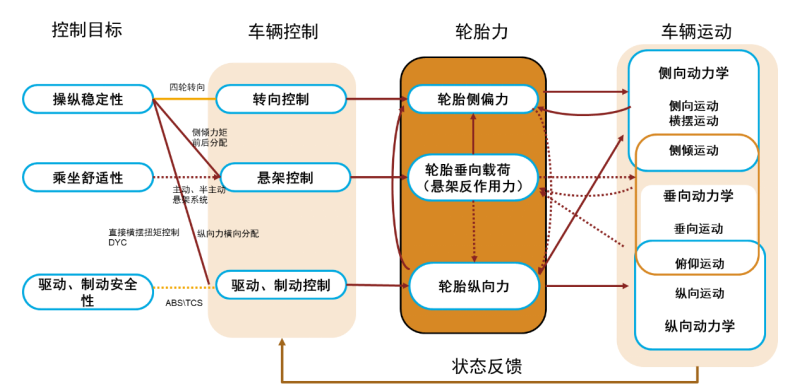
輪胎作為車輛與路面保持唯一接觸的部件,提供了車輛運行的除空氣阻力外的所有外力。是車輛運動的基礎(chǔ)。
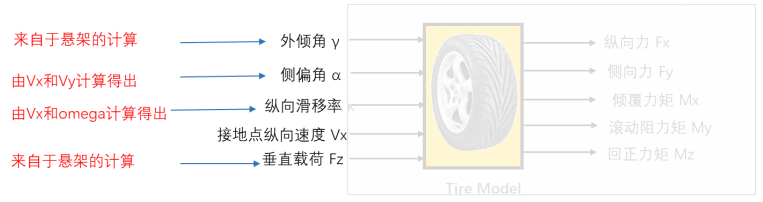
輪胎建模的核心是根據(jù)輪胎當(dāng)前狀態(tài)計算出輪胎受到的外力,也即車輛受到的除空氣阻力外的所有外力。
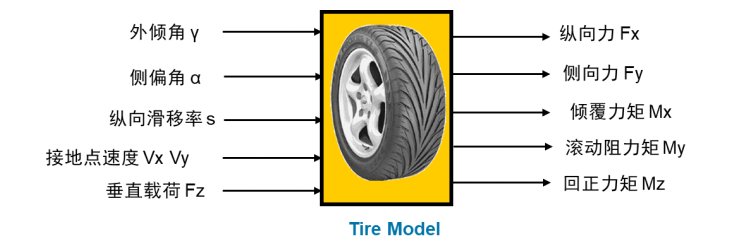
由于車輛是 6 個自由度,因此輪胎相應(yīng)的也要計算出 6 個自由度對應(yīng)的力、力矩,即輪胎六分力。這些力與輪胎的狀態(tài)參數(shù),外傾角、側(cè)偏角、滑移率、垂直載荷等狀態(tài)有關(guān)。這個關(guān)系即輪胎建模的模型公式。Vehicley Dynamic Blockset 提供魔術(shù)公式輪胎模型,以及 Fiala 輪胎模型。
以魔術(shù)公式輪胎模型為例,通過以下公式表達六分力與狀態(tài)參數(shù)之間的數(shù)值擬合關(guān)系。簡單的可以表現(xiàn)為以下形式。
Y(x)=Dsin{C arctan[Bx-E(Bx-arctan(Bx))]}
? 系數(shù) B,C,D 依次由輪胎的垂直載荷和外傾角確定;
? B 為剛度因子; C 為形狀因子; D 為峰值因子; E 為曲率因子。C 為曲線形狀因子,決定曲線是側(cè)向力、縱向力還是回正力矩;
? Y 為輸出變量,可以是縱向力 Fx ,側(cè)向力 Fy, 回正力矩 M;
? x 為輸入變量,在不同的情況下分別表示輪胎的側(cè)偏角 α 或縱向滑移率 κ;
注意:B、C、D 是隨著載荷、車速等不同而變化,而非常量。
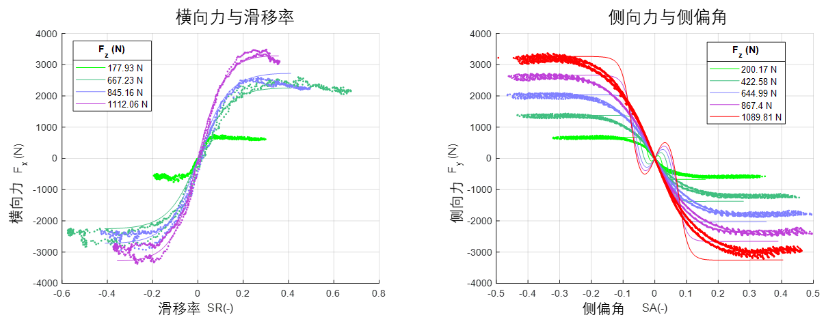
其中的參數(shù)可以從輪胎實驗的測量數(shù)據(jù)進行擬合。
下圖中就是按照魔術(shù)公式擬合處的輪胎模型(實線)與輪胎測試數(shù)據(jù)(點)之間的對比。
因此建立輪胎模型可以按照以下步驟生成:
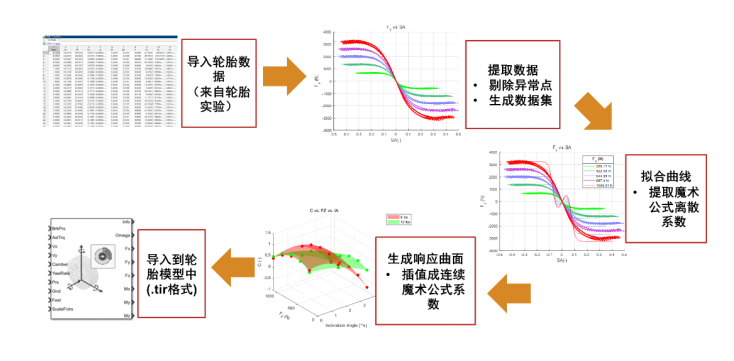
Vehicle Dynamic Blockset 中的輪胎模型還支持 .tir 格式的輪胎模型導(dǎo)入。也提供一些常用輪胎模型的選擇。
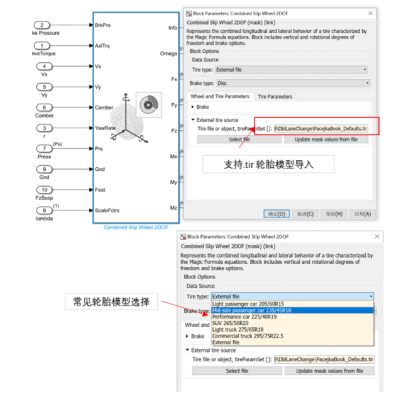
這里有個額外的小問題,魔術(shù)公式模型中輸入的參數(shù)如何獲得?其中,外傾角和垂直載荷來自于懸架模型的計算,側(cè)偏角、縱向滑移率則是來自于車速 (Vx, Vy) 和輪速 (omega) 的計算。
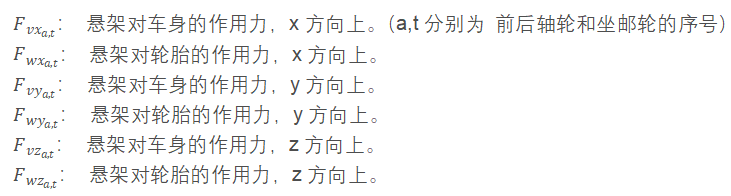
要點3. 懸架模型
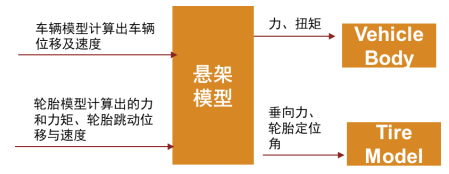
懸架模型連接車身與輪胎 ,一方面?zhèn)鬟f輪胎力和力矩給車身,另一方面根據(jù)車身狀態(tài)計算出輪胎的定位參數(shù),傳遞給輪胎。
懸架結(jié)構(gòu)較為復(fù)雜,很多桿件結(jié)構(gòu)組成的多剛體,此外還有非線性的彈簧阻尼原件。如果需要對懸架進行細節(jié)動力學(xué)建模,需要借助多體動力學(xué)仿真工具,如 Simscape Multibody。而在參數(shù)化車輛模型中,懸架模型可以簡化成等效的彈性、阻尼原件來表達其動力學(xué)特性,進而建立動力學(xué)微分方程。同時懸架對輪胎定位參數(shù)的影響可以通過查表得方式獲得。
簡化成彈性、阻尼原件得等效懸架模型示意圖如下:
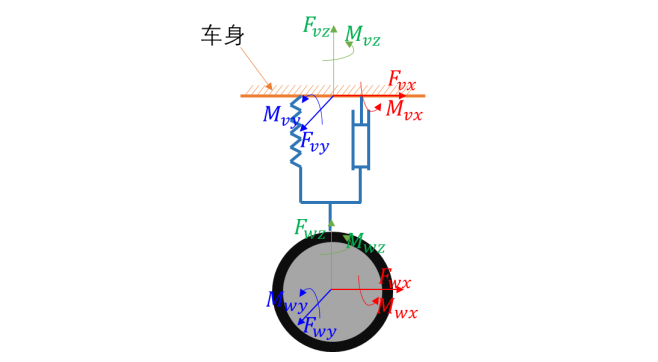
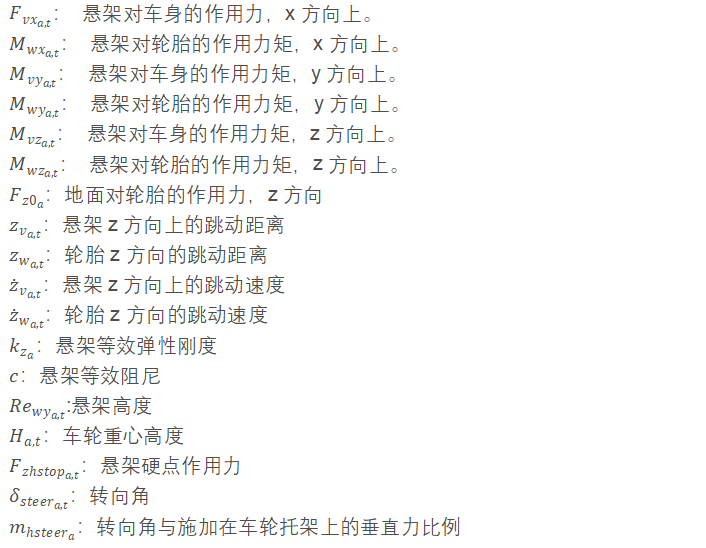
等效懸架模型中彈簧和阻尼只作用于 z 方向上。因此,對于輪胎傳過來的六分力中,x、y 方向的力以及 z 方向的轉(zhuǎn)矩直接傳遞給車身的,z 方向上,傳遞的力要受懸架彈簧阻尼原件的影響。
而同時由于四個輪胎對應(yīng)的等效懸架可能處在不同的跳動位移中,因此,x,y 方向的扭矩會考慮懸架側(cè)傾的問題等問題。
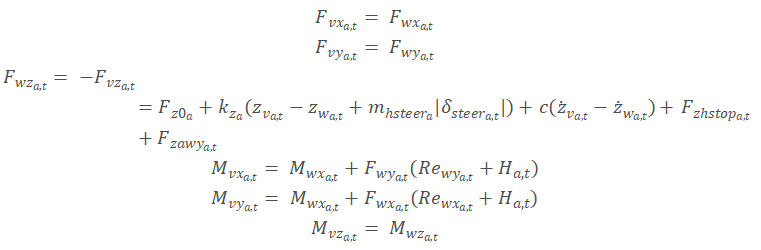
向下滑動查看完整公式
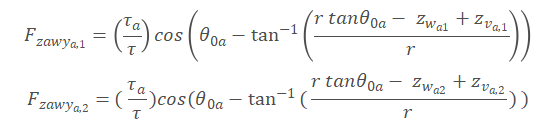
懸架連接還有橫向穩(wěn)定桿 (Anti-sway bar) 又稱防傾桿,是汽車懸架中的一種輔助彈性元件。當(dāng)車身側(cè)傾時,兩側(cè)懸架跳動不一致,橫向穩(wěn)定桿發(fā)生扭轉(zhuǎn),桿身的彈力成為阻礙側(cè)傾的阻力,從而起到橫向穩(wěn)定的作用。體現(xiàn)在模型上就是將懸架的抗側(cè)傾力修正為以下公式:
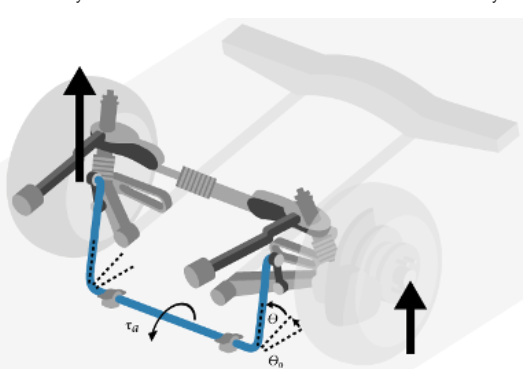
抗側(cè)傾扭矩
抗側(cè)傾扭矩

抗側(cè)傾力
懸架的動態(tài)系統(tǒng)等效模型雖然可以簡化為以上公式,但是有時難以得到等效剛度和阻尼的大小。
一般參數(shù)化建模可以直接通過懸架 K&C 實驗獲得。其中動力學(xué)特性就是將懸架對車身的力和力矩做成對懸架跳動和車輪定位參數(shù)的查表。這個查表數(shù)據(jù)既可以來自于懸架 K&C 特性始線,也可以來自于多體動力學(xué)工具搭建的復(fù)雜的懸架模型。
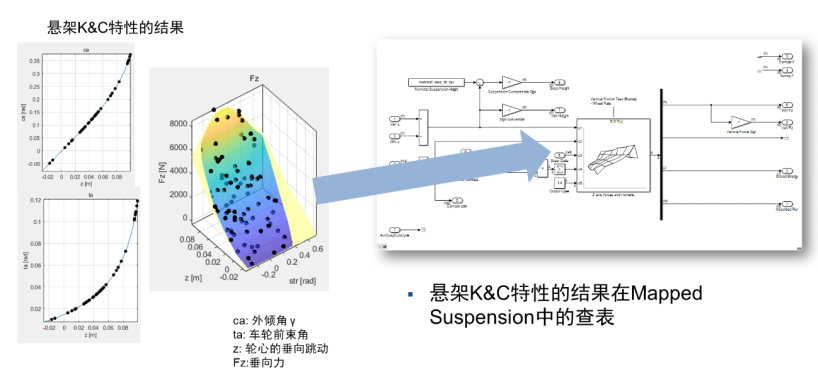
懸架模型的另一個重要內(nèi)容就是計算輪胎的定位參數(shù),外傾角 ξa,t、后傾角 ηa,t 和前束角 ζa,t。這部分的內(nèi)容叫做懸架的 K 特性,也可以從 K&C 結(jié)果查表得出。

車輪轉(zhuǎn)向角也受 K 特性影響

除了通過 K&C 實驗查表獲得這些參數(shù),也可以通過集合計算得出,例如麥弗遜懸架的參數(shù)可由以下公式得出

備注:從輪胎建模角度上來說,只有內(nèi)傾角和車輪轉(zhuǎn)向角對魔術(shù)公式輪胎模型有意義
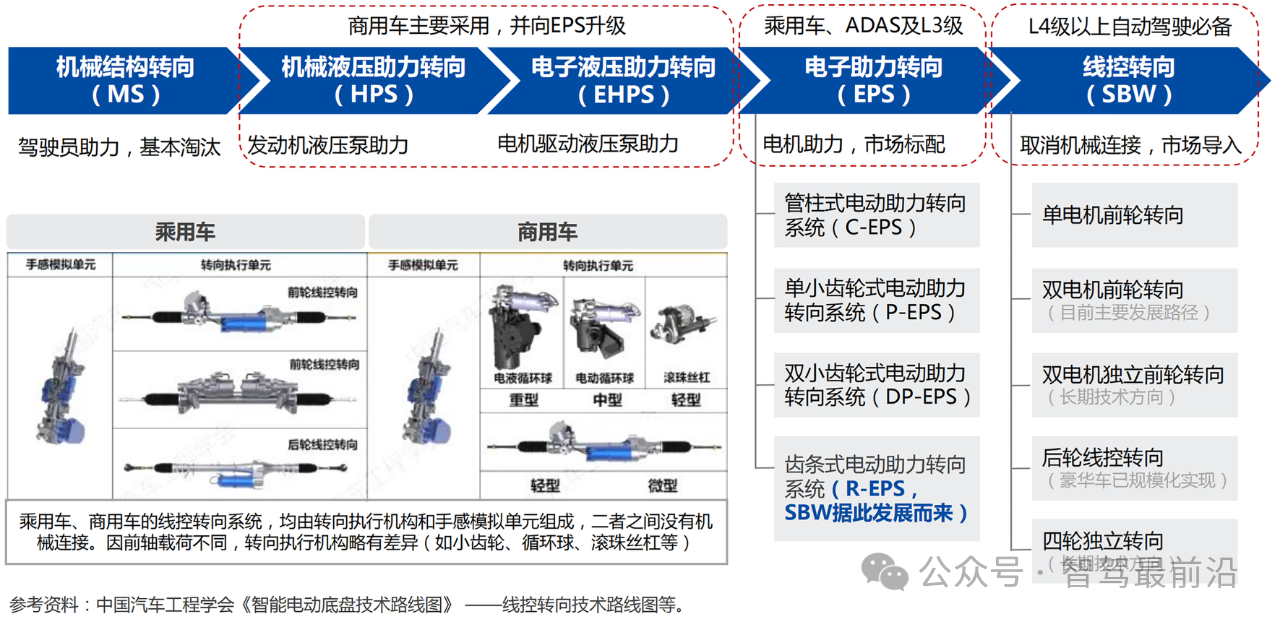
要點4. 轉(zhuǎn)向模型
轉(zhuǎn)向模型是根據(jù)當(dāng)前的方向盤轉(zhuǎn)角計算左右車輪的轉(zhuǎn)角。Vehicle Dynamic Blockset 提供的運動學(xué)模型可以通過幾何參數(shù)計算。以下是阿克曼轉(zhuǎn)向模型的計算公式及其示意圖:
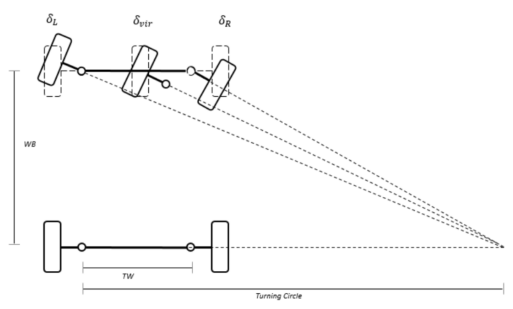
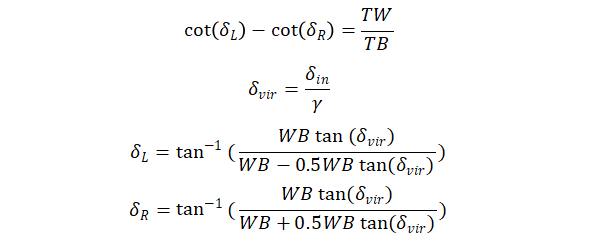
向下滑動查看完整公式
γ 是轉(zhuǎn)向比
如果需要集成 EPS 算法到整車模型中,則需要選擇動力學(xué)轉(zhuǎn)向模型模塊。
至此車輛本體模型已經(jīng)搭建完成。
結(jié)論
完整的能夠反應(yīng)車輛三個方向運動的車輛模型復(fù)雜程度非常高。我們既可以選用基于車輛動力學(xué)建模的整車模型也可以選用基于多體動力學(xué)建模的整車模型。就底盤控制、整車 HIL 測試,以及后續(xù)自動駕駛仿真需求而言,我們傾向于前者。后者更適合于高度自定義車輛,比如火星車、或者用于復(fù)雜的懸架設(shè)計及調(diào)教等。
這一部分的內(nèi)容基于車輛動力學(xué)相關(guān)的課程。深度理解車輛建模原理可以幫助同學(xué)們設(shè)計底盤控制算法。
原文標(biāo)題:MATLAB 手把手 | 五步教你玩轉(zhuǎn)整車建模和自動駕駛仿真 (Step 3)
文章出處:【微信公眾號:MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
審核編輯:湯梓紅
-
matlab
+關(guān)注
關(guān)注
185文章
2979瀏覽量
230662 -
仿真
+關(guān)注
關(guān)注
50文章
4102瀏覽量
133739 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13877瀏覽量
166618
原文標(biāo)題:MATLAB 手把手 | 五步教你玩轉(zhuǎn)整車建模和自動駕駛仿真 (Step 3)
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于SOA自動駕駛整車及運營系統(tǒng)架構(gòu)
基于SOA自動駕駛整車及運營系統(tǒng)架構(gòu)
智能駕駛整車在環(huán)實驗室SYNO解決方案
線控底盤如何讓自動駕駛加速奔跑?
重塑線控底盤技術(shù):自動駕駛的未來支柱
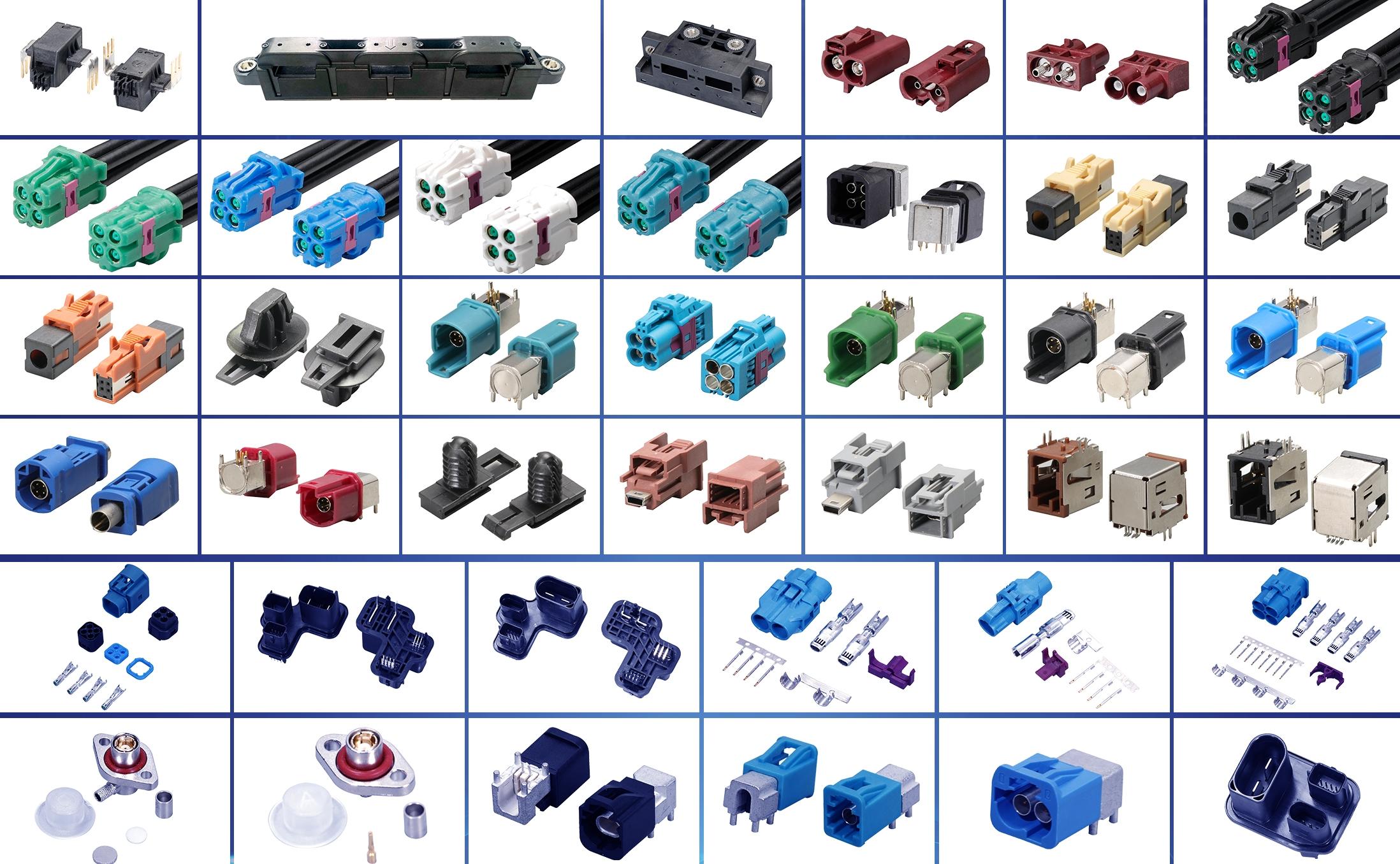
自動駕駛演變下,汽車連接器市場如何擴容?
線控底盤,自動駕駛時代的基石?
整車控制器VCU應(yīng)用層算法開發(fā)流程
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
康謀分享 | 自動駕駛聯(lián)合仿真——功能模型接口FMI(四)

康謀分享 | 自動駕駛聯(lián)合仿真——功能模型接口FMI(三)

自動駕駛仿真測試實踐:高精地圖仿真

康謀分享 | 自動駕駛聯(lián)合仿真——功能模型接口FMI(一)

經(jīng)緯恒潤全棧自研底盤域控制器量產(chǎn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論