 關于兩種中穎變頻洗衣機的無感FOC方案簡介
關于兩種中穎變頻洗衣機的無感FOC方案簡介
文章主要大綱如下:
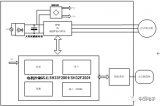
變頻洗衣機無感FOC方案框圖
變頻洗衣機無感FOC方案算法介紹
中穎滾筒BLDC洗衣機方案優勢
中穎波輪DDM洗衣機方案優勢
變頻洗衣機硬件電路
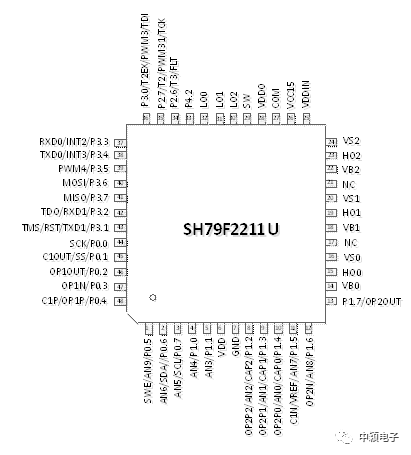
電機主控芯片簡介
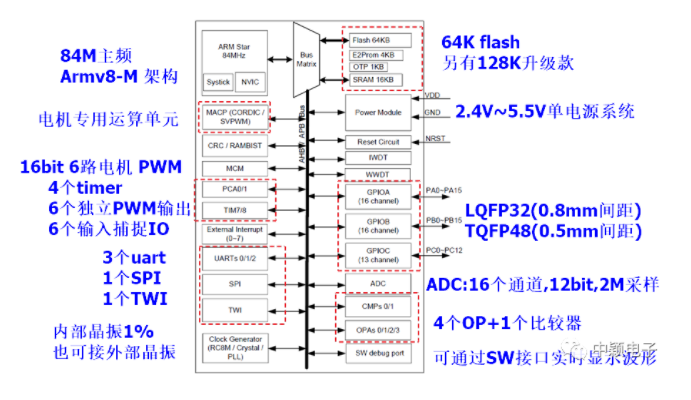
內核:32位ARM Star, ARMv8-M架構,可選浮點和DSP運算
工作頻率:84MHz,內部RC常溫0.2%/全溫度范圍1%精度,可接外部晶振
集成硬件運算單元(MACP):支持三角函數、坐標變換、SVPWM運算等
存儲空間:64K/128K兩種FLASH size,16K字節RAM,核心代碼可加載至RAM
封裝及I/O引腳:LQFP32(0.8mm pitch)29個IO、 TQFP48(0.5mm pitch) 45個IO
電壓及溫度范圍:2.4V~5.5V單電源供電,環境溫度-40℃~+105℃
電機專用PWM模塊:16位timer、上下橋互補輸出、自動死區、硬件觸發AD等功能
ADC: 12bit 、2M采樣率、16個channels及各自獨立的結果寄存器
另有6個timer:2個PCA(可輸出6路獨立的PWM,或用做6路輸入捕捉)、2個16位普通timer、1個獨立的32位timer(QEI模塊內)和1個systick
AMOC:4個OP、1個比較器,或者3個OP、2個比較器
豐富的通訊接口:3個urat、1個SPI、1個TWI,帶FIFO功能
電機調試軟件workbench:可通過仿真口或串口,實時顯示電機波形,方便調試
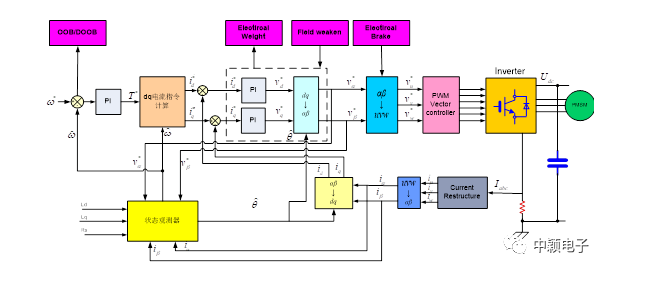
無感FOC控制方案框圖
變頻洗衣機無感FOC方案算法
基本算法
? 空間磁場定向控制(FOC)
? 坐標變換(clarke、park及其逆變換)
? SVPWM空間矢量調制技術
? PID調節器
? 過流保護、電機過溫保護、IPM過溫保護
? 堵轉、缺相、過壓、欠壓等異常檢測
核心算法
? 電機轉子位置和速度觀測器
? 大負載啟動及抗負載突變能力
? 4~5倍的深度弱磁控制
? 電子稱重
? 偏心檢測( OOB )
? 對角偏心檢測(DOOB)
? 恒壓制動和剎車制動
? 電機極低速運行
電機轉子位置和速度觀測器
電機轉子位置和速度觀測用的是滑模觀測器+PLL,滑模觀測器框圖如下:
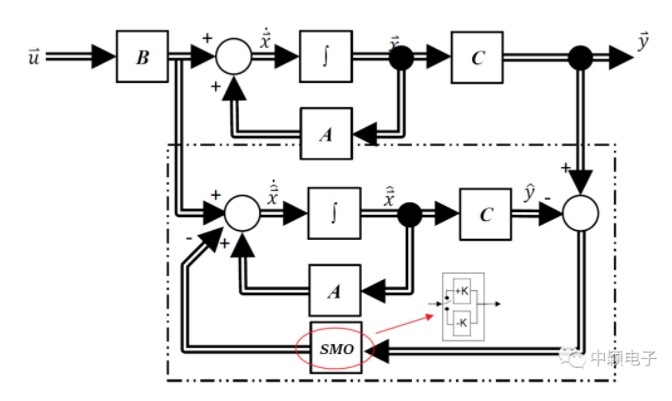
通過滑模觀測器觀測到電機反電動勢信號后,利用鎖相環(PLL)對反電動勢濾波,提取準確的速度和位置信息,提高抗干擾能力。
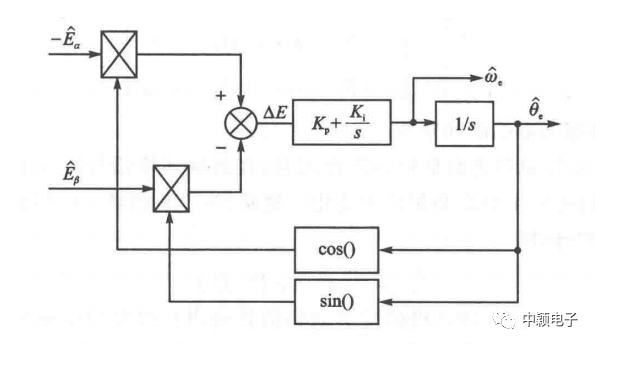
鎖相環(PLL)的結構框圖如下圖所示:
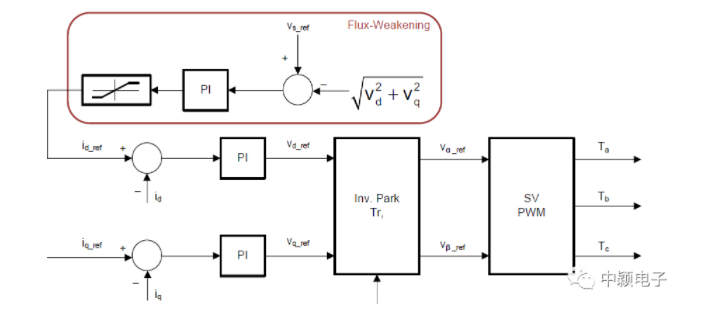
深度弱磁算法
弱磁控制算法的框圖如下:
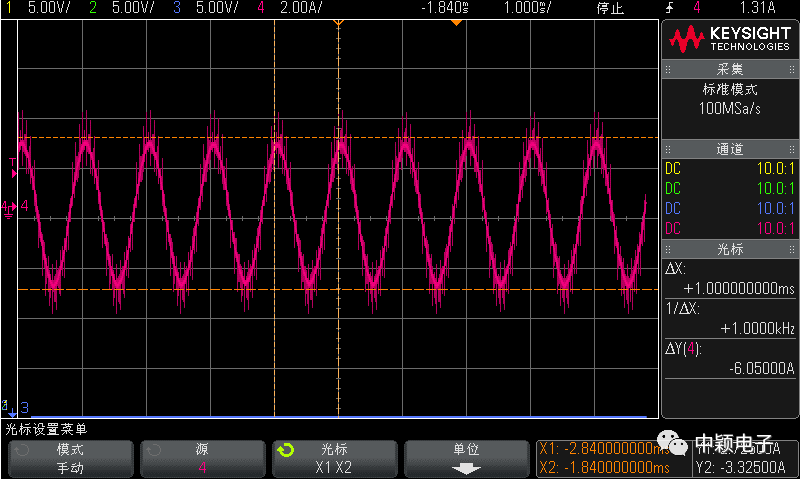
滾筒BLDC方案深度弱磁運行波形
深度弱磁,電頻率1Khz的相電流波形如下:
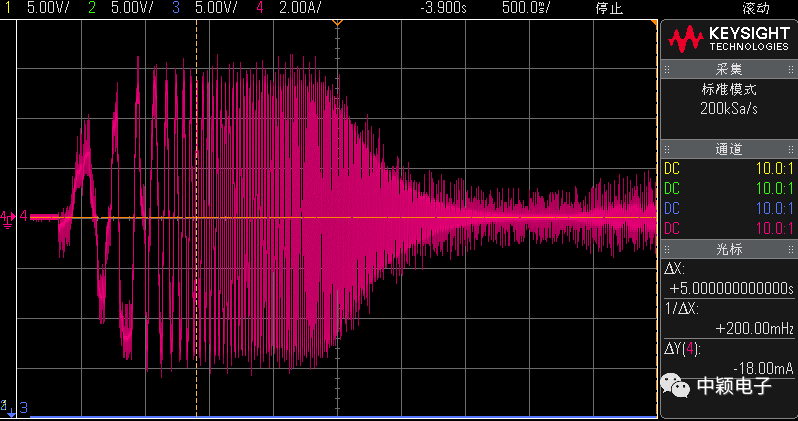
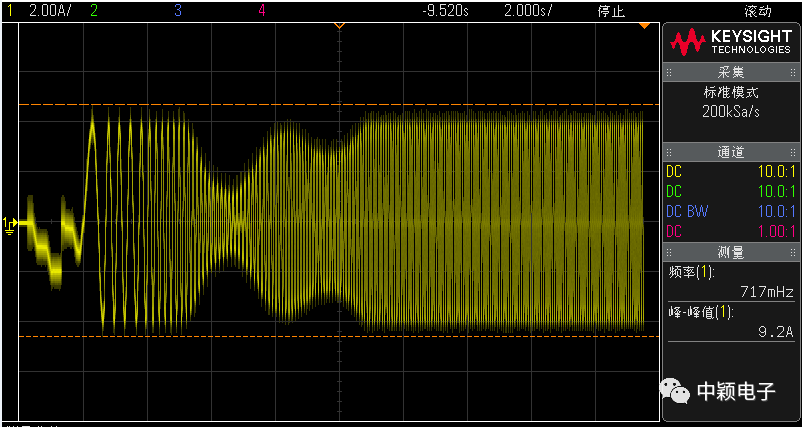
滾筒BLDC方案大負載啟動
大負載時啟動,然后逐漸減小負載,波形如下:
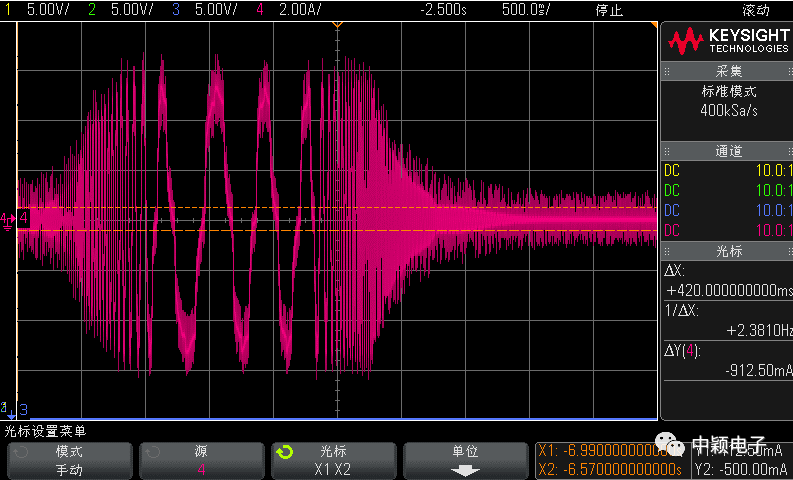
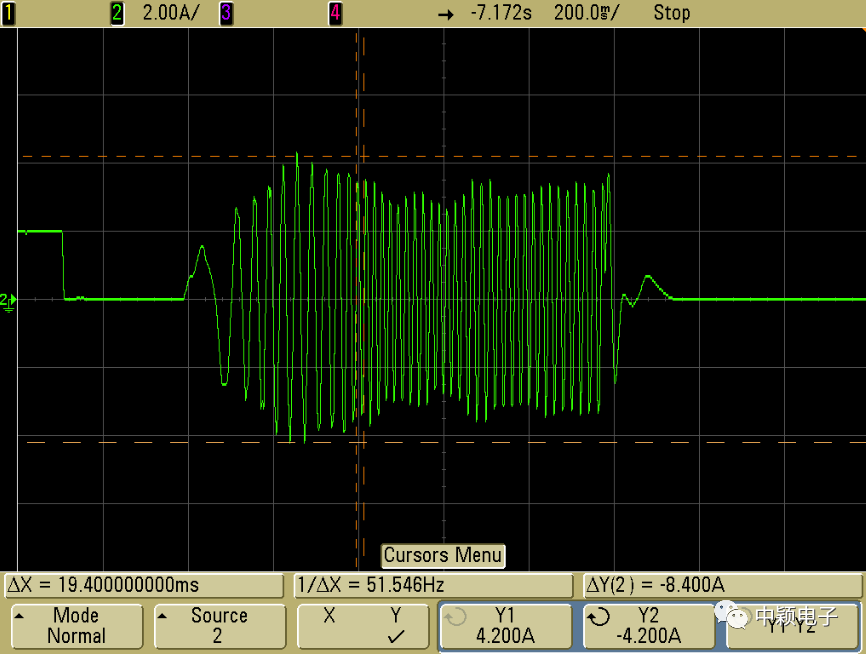
滾筒BLDC方案抗負載突變能力
運行時突然加能夠使電機停止的負載,然后再突然去掉負載:
波輪DDM洗衣機重載洗滌運行
滿載洗滌模式電流波形:
波輪DDM洗衣機滿載甩干運行
滿負載甩干時電流波形:
稱重檢測
質量與功率的關系如下:
當檢測稱重時時,物體重量和功率曲線為:
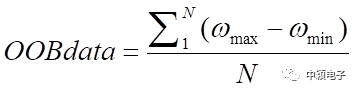
偏心與對角偏心檢測(OOB&DOOB)
偏心示意圖:
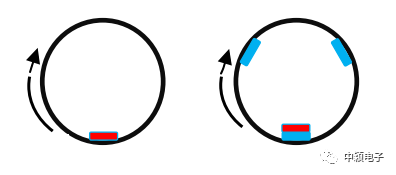
偏心公式:
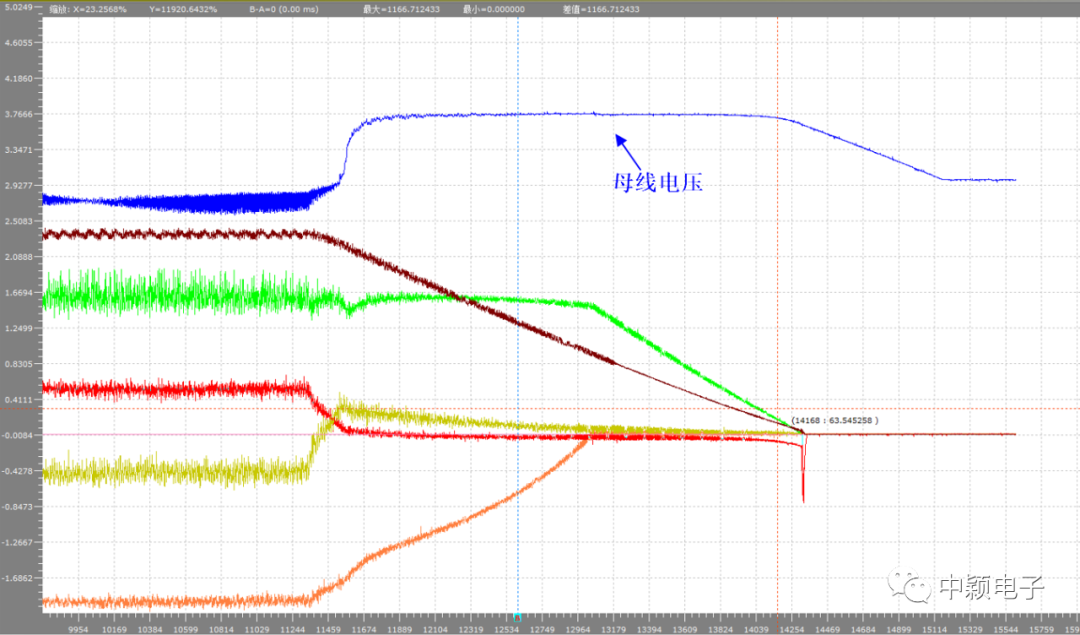
滾筒BLDC洗衣機恒壓制動
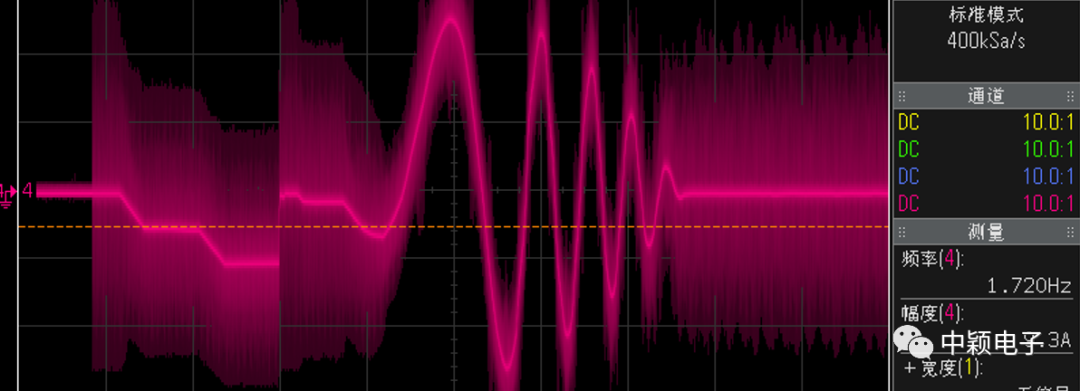
波輪DDM 洗衣機極低速( 3hz )啟動及運行波形
中穎滾筒BLDC洗衣機無感FOC方案優勢
調速范圍寬,電機機械轉速范圍150~18000rpm
啟動轉矩大,抗負載突變能力強
OOB/ DOOB檢測精度高
稱重算法精度高
恒壓制動電壓控制穩定
電機溫度檢測功能
內置高速運放,BOM成本低
最低速運行頻率低,電機電頻率最低可達3hz
啟動轉矩大,抗負載突變能力強
高精度低轉速運行的偏心檢測,可在電機轉速10hz以內完成
稱重算法精度高
電機溫度檢測功能
內置高速運放,BOM成本低
硬件系統—主芯片
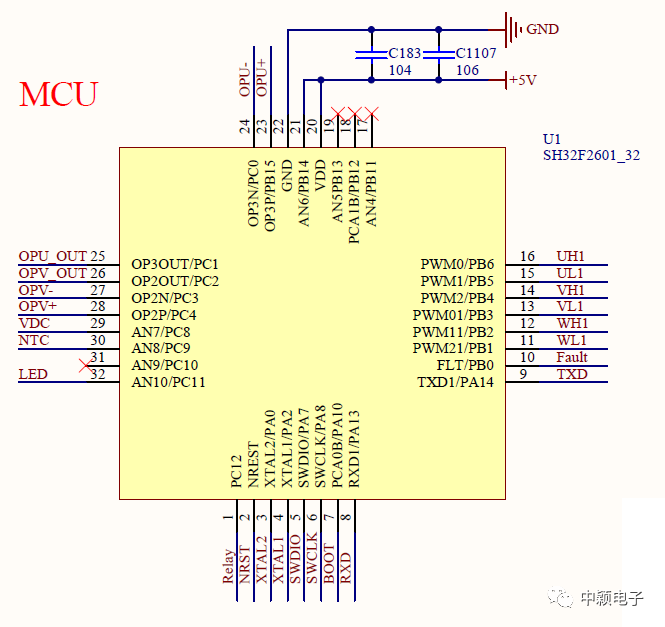
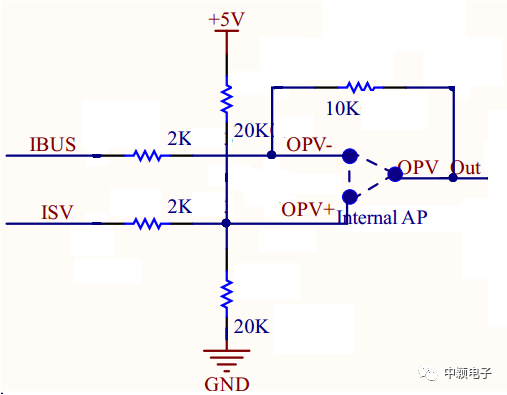
硬件系統—模擬量采樣
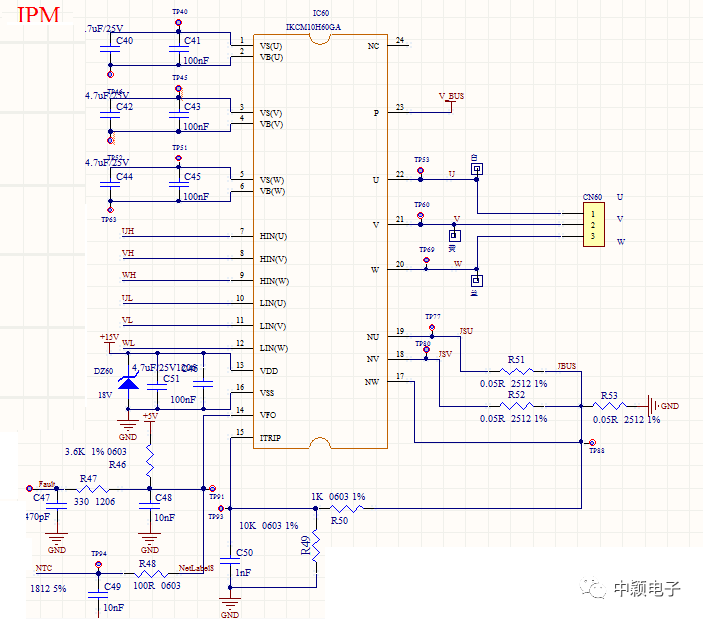
硬件系統—驅動
來源: 中穎電子
-
變頻
+關注
關注
1文章
316瀏覽量
33841 -
洗衣機
+關注
關注
12文章
679瀏覽量
43254 -
FOC
+關注
關注
20文章
322瀏覽量
42798 -
中穎電子
+關注
關注
4文章
174瀏覽量
7434
發布評論請先 登錄
相關推薦
基于中穎SH33F2801變頻主控MCU的波輪和滾筒變頻洗衣機方案
選購洗衣機的方法
FPGA設計洗衣機
如何部署FOC來設計高效、安靜的洗衣機

變頻洗衣機和定頻洗衣機的區別
以下這兩種情況下需要選擇購買波輪洗衣機
告別跑腿,洗衣機“無感支付”更便利
洗衣機智能驅動控制芯片方案

洗衣機fpa和bldc電機區別在哪
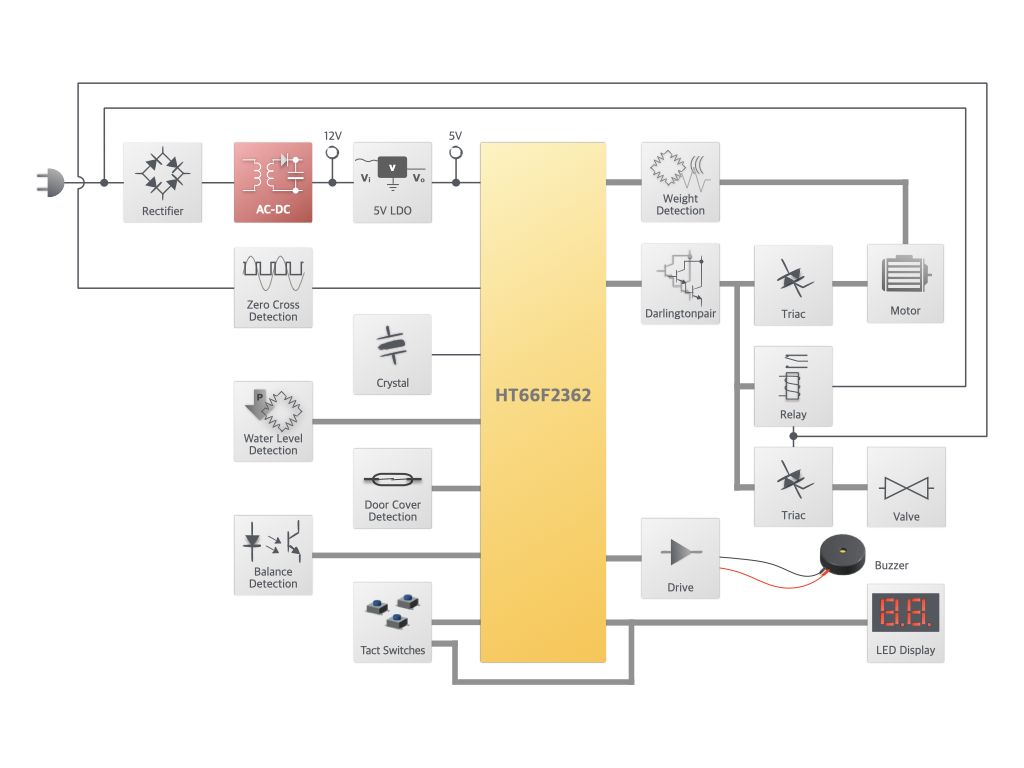
HT66F2362 MCU在波輪定頻洗衣機的應用





 工商網監
工商網監
評論