 如何利用STM32實現酒精測試儀的設計
如何利用STM32實現酒精測試儀的設計
背景
該項目的誕生是因為觀察到在大多數汽車共享服務中,人們即使喝醉了也可以開車,因為沒有檢查他們的狀況。事實上,要駕駛汽車,您只需使用移動應用程序打開它并拿到里面的鑰匙。為了解決這個問題,我創建了一個基于云的物聯網呼氣測醉器,連接到一個包含汽車鑰匙的盒子;如果測試返回負值,則該框將打開,否則將保持關閉狀態。以下是更詳細的分析:IoT 設備架構、云層和 IoT 設備的 RIOT-OS 代碼。
物聯網設備
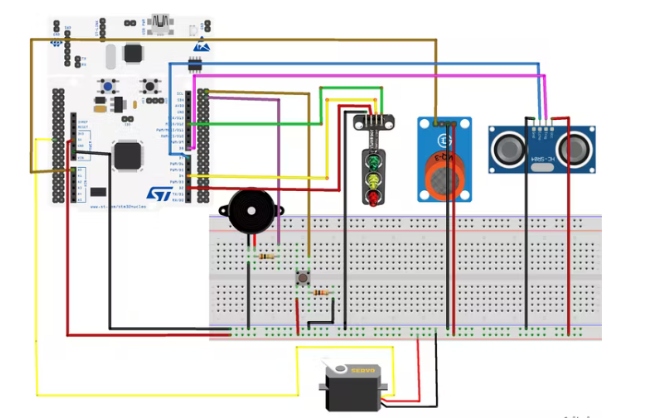
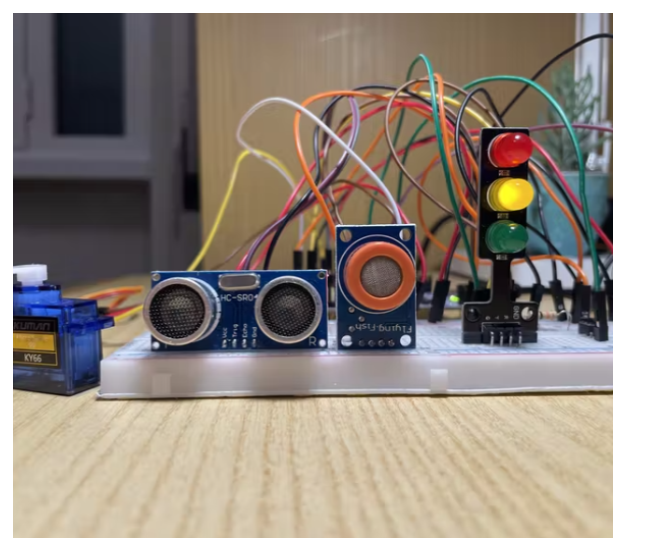
上圖顯示了傳感器和執行器如何連接到 SMT NUCLEO-f401re 板。
使用的傳感器是超聲波傳感器和MQ-3酒精傳感器;使用的執行器是伺服電機、三個 LED(迷你交通燈)、一個按鈕和一個蜂鳴器。
超聲波傳感器(HC SR04):
它用于允許酒精傳感器計算正確的測量值。事實上,它位于 MQ 3 傳感器附近,只有當傳感器與人的距離小于 5 厘米時,MQ 3 模塊才會在人呼氣時開始測量人的血液酒精水平。通過發送觸發信號和接收回波信號來估計距離;計算出的時間(以我們為單位)除以 58 是超聲波傳感器前方物體的距離(以厘米為單位)。可測量2-400厘米范圍內的距離,測距精度可達3毫米。一旦通過移動應用程序打開汽車(通過為系統供電),超聲波傳感器就會進行定期感應(每 5 秒執行一次新的測量)。當裝有鑰匙的盒子被打開時,傳感器停止采取措施。
MQ 3 傳感器:
它測量空氣中酒精的濃度。其檢測范圍從 0.04 到 4 mg/l 酒精。它是一種金屬氧化物半導體,通過改變電阻來檢測周圍是否存在酒精蒸汽。事實上,當酒精濃度變高時,傳感器的電導率也會上升。電導率的這種變化被轉換為指示酒精含量的輸出值。特別是,當返回的值減去 100 大于 450 時,酒精含量被認為太高,并且框鍵將保持關閉狀態。該傳感器具有模擬輸出和數字輸出,但對于本項目,使用的是模擬輸出。MQ 3 傳感器僅在超聲波傳感器計算的距離小于 5 cm 時進行測量,因此可以計算出正確的測量值。
伺服電機:
伺服電機用于打開或關閉裝有汽車鑰匙的盒子。如果酒精傳感器返回的值小于或等于 450,則該框將打開,以便取走鑰匙。如果測量值大于 450,框鍵將保持關閉狀態。
迷你紅綠燈:
它具有三個 LED:紅色、黃色和綠色。它們用于為超聲波傳感器測量的距離提供反饋。距離大于 15 厘米時紅色 LED 亮;距離在5厘米至15厘米之間時黃色燈亮;當距離小于 5 厘米時,綠色會亮起。當綠色 LED 亮起時,表示該人距離傳感器足夠近,可以進行酒精測試,因此 MQ 3 傳感器被激活并可以測量酒精水平。
按鈕:
它用于關閉框鍵。按下時,伺服電機被激活,框鍵將關閉。為了將按鈕連接到電路板,它使用了一個 10K 歐姆的電阻器。
蜂鳴器:
它用于在呼氣測醉器返回的值超出限制時提供反饋。當 MQ 3 傳感器測量的值大于 450 時,蜂鳴器開啟 1 秒。為了將蜂鳴器連接到電路板上,它使用了一個 1 歐姆的電阻器。
云級別
云級別完全使用 AWS 生態系統開發。在下圖中,有一個架構說明了所使用的 AWS 服務如何在整個系統中連接。
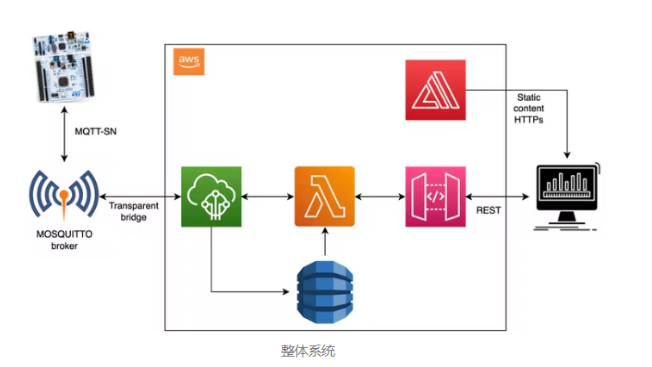
物聯網設備層和云端通過基于發布/訂閱機制的通信協議交換消息。董事會使用 MQTT-SN 協議將酒精傳感器采取的措施發送到 Mosquitto 代理。這些消息在“alcool_level”主題下發布。此外,該板訂閱了主題“topic_in”以接收從外部發送的消息,這些消息用于關閉或打開包含密鑰的框。Mosquitto 使用 MQTT 通過透明橋與 AWS 生態系統交換消息,這是一個 Python 腳本,用作 Mosquitto 和 AWS IoT Core 之間的橋梁。實際上,它將“alcool_level”的消息從板發布到 IoT Core,并將 IoT Core 在主題“topic_in”下發布的輸入消息作為輸入消息,這些消息被定向到板。然后,通過設置適當的規則,從板傳到 IoT Core 的消息直接存儲到 DynamoDB。然后通過調用 REST API 將它們顯示在 Web 儀表板上,這會觸發從數據庫中獲取數據的 lambda 函數(“get_data_from_db.py”)。從 Web 儀表板,可以通過在主題“topic_in”下發布消息“關閉”或消息“打開”來關閉或打開框鍵。消息通過調用使用另一個 lambda 函數(“publish_to_iotcore.py”)執行此操作的 REST API 發布到 IoT Core。
AWS Amplify 用于托管 Web 儀表板的所有靜態 Web 內容。這會觸發從數據庫中獲取數據的 lambda 函數(“get_data_from_db.py”)。從 Web 儀表板,可以通過在主題“topic_in”下發布消息“關閉”或消息“打開”來關閉或打開框鍵。消息通過調用使用另一個 lambda 函數(“publish_to_iotcore.py”)執行此操作的 REST API 發布到 IoT Core。AWS Amplify 用于托管 Web 儀表板的所有靜態 Web 內容。這會觸發從數據庫中獲取數據的 lambda 函數(“get_data_from_db.py”)。從 Web 儀表板,可以通過在主題“topic_in”下發布消息“關閉”或消息“打開”來關閉或打開框鍵。消息通過調用使用另一個 lambda 函數(“publish_to_iotcore.py”)執行此操作的 REST API 發布到 IoT Core。AWS Amplify 用于托管 Web 儀表板的所有靜態 Web 內容。消息通過調用使用另一個 lambda 函數(“publish_to_iotcore.py”)執行此操作的 REST API 發布到 IoT Core。AWS Amplify 用于托管 Web 儀表板的所有靜態 Web 內容。消息通過調用使用另一個 lambda 函數(“publish_to_iotcore.py”)執行此操作的 REST API 發布到 IoT Core。AWS Amplify 用于托管 Web 儀表板的所有靜態 Web 內容。
在網絡儀表板上有:
兩個圖表用于顯示:過去 7 天內一天內打開盒子鑰匙的次數(MQ-3 傳感器測量的值小于或等于 450)和酒精測試返回陽性的次數過去 7 天內一天的價值;
顯示 MQ-3 傳感器在當天采取的所有措施的表格;
用于打開或關閉框鍵的兩個按鈕;
關于過去 7 天計算的測試的一些統計數據:測試結果為陽性的最大時間段(8-12、12-17、17-20、20-24 和 00-8 之間的值);裝有鑰匙的盒子被打開的次數;呼氣測醉器檢測到超過限值的次數;陽性測試占總測試的百分比。
RIOT代碼的邏輯
主要功能如下:
int main(void){
int result;
sensor_init();
mqtts_init();
while(true){
if(box_keys==0){
dist=distance_ultrasonic();
if(dist<5){
set_led("verde");
check_alcool();
}
else if(dist>=5 && dist<15){
set_led("giallo");
}
else{
set_led("rosso");
}
}
else{
while(box_keys==1){
result = gpio_read(box_pin);
if(result>0){
box_keys=0;
/*close box keys*/
servo_set(&servo, SERVO_MAX);
}
xtimer_sleep(0.5);
}
}
xtimer_sleep(5);
}
return 0;
}
如果全局變量box_keys等于 0,則意味著包含鍵的框已關閉,因此我們可以繼續進行測量。函數distance_ultrasonic返回從超聲波傳感器計算的距離(以厘米為單位)。
如果距離小于 5 厘米:通過set_led("verde")函數打開迷你交通燈的綠色 LED ,用戶可以繼續進行酒精測試。函數check_alcool管理與測試相關的所有部分(更多細節在下面解釋)。
如果距離在 5 厘米到 15 厘米之間,黃色 LED 燈亮,表示計算測試的距離差不多,但用戶必須更靠近
如果距離大于 15 厘米,紅色 LED 會亮起,表示距離太遠,用戶必須更靠近傳感器才能進行酒精測試。
如果全局變量box_keys不等于 0,則表示包含鍵的框已打開,因此我們進入“else”塊。在其值等于 1 之前,每 0.5 秒讀取一次連接到按鈕的引腳。如果它返回一個大于零的值(當它被按下時它返回值 256),通過用伺服電機鎖定它來關閉盒子,并且變量box_keys設置為 0 以允許進入前面的“if”塊下一輪 while 循環。
如果box_keys等于 0,則超聲波傳感器將每 5 秒感應一次,這是由于在 main while 中的“if-else”塊之外設置的計時器。
下面將對 main 函數中前面提到的所有函數進行更詳細的解釋。
sensor_init函數:在 main 函數開始時使用,用于初始化傳感器和執行器的所有 GPIO 引腳,以及伺服電機。
void sensor_init(void){
/*ultrasonic*/
gpio_init(trigger_pin, GPIO_OUT);
gpio_init_int(echo_pin, GPIO_IN, GPIO_BOTH, &call_back, NULL);
distance_ultrasonic(); /*first read returns always 0*/
/*mq3*/
adc_init(ADC_LINE(0));
/*traffic light*/
gpio_init(red_pin, GPIO_OUT);
gpio_init(yellow_pin, GPIO_OUT);
gpio_init(green_pin, GPIO_OUT);
/*button box keys*/
gpio_init(box_pin,GPIO_IN);
/*buzzer*/
gpio_init(buzzer_pin,GPIO_OUT);
/*servo init*/
servo_init(&servo, DEV, CHANNEL, SERVO_MIN, SERVO_MAX);
servo_set(&servo, SERVO_MAX);
}
用于引腳和伺服變量的所有變量都是全局的,因此它們是在函數之外定義的(您可以在項目的 GitHub 存儲庫中的代碼中找到有關它們的更多信息)。對于 MQ 3 傳感器,它被初始化為板接收值的模擬線路。用于初始化伺服電機的常量DEV、CHANNEL、SERVO_MIN、SERVO_MAX在函數外部定義。
check_alcool功能:它檢查用戶呼吸中的酒精含量并據此采取行動。
void check_alcool(void){
int sample = 0;
char msg[4];
sample=read_mq3();
sprintf(msg, "%d", sample);
if (sample > 450) {
gpio_set(buzzer_pin);
xtimer_sleep(1);
gpio_clear(buzzer_pin);
} else {
/*open box keys*/
servo_set(&servo, SERVO_MIN);
box_keys=1;
}
pub(TOPIC_OUT1,msg);
}
函數read_mq3返回 MQ 3 傳感器計算的值,如果大于 450 表示超過法定限制,因此無法駕駛汽車。包含按鍵的盒子將保持關閉狀態,并激活蜂鳴器 1 秒鐘(蜂鳴器用于向用戶提供酒精測試陽性結果的反饋)。如果傳感器返回的值小于或等于 450,則打開盒子(通過伺服電機解鎖盒子)并將全局變量box_keys設置為 1。在這兩種情況下,由Breathalyzer 與主題“alcool_level”下的函數pub一起發布(這是常量TOPIC_OUT1的值)。
read_mq3函數:返回 MQ 3 傳感器測量的值。
int read_mq3(void){
int sample = 0;
int min = 100;
sample = adc_sample(ADC_LINE(0), RES);
sample = (sample > min) ? sample - min : 0;
return sample;
}
如果傳感器測量的值大于 100,則返回減去 100 的值,否則返回 0。
distance_ultrasonic函數:返回超聲波傳感器測量的值。
int distance_ultrasonic(void){
uint32_t dist;
dist=0;
echo_time = 0;
gpio_clear(trigger_pin);
xtimer_usleep(20);
gpio_set(trigger_pin);
xtimer_msleep(100);
if(echo_time > 0){
dist = echo_time/58;
}
return dist;
}
它向傳感器發送一個脈沖并等待 100 毫秒以讀取全局變量echo_time 的值。如果該值大于 0,則將其除以 58 以計算傳感器前方物體的距離(以厘米為單位)。
call_back函數:它與distance_ultrasonic函數一起用于計算超聲波傳感器測量的值。
void call_back(void* arg){
int val = gpio_read(echo_pin);
uint32_t echo_time_stop;
(void) arg;
if(val){
echo_time_start = xtimer_now_usec();
}
else{
echo_time_stop = xtimer_now_usec();
echo_time = echo_time_stop - echo_time_start;
}
}
當檢測到回顯引腳上的變化時,該功能被激活。它測量從發送超聲波脈沖到接收回超聲波脈沖的時間差。它將值存儲在全局變量echo_time中, distance_ultrasonic函數使用該變量來計算傳感器前方物體的距離(以厘米為單位)。echo_time_stop也是一個全局變量。
set_led函數:用于根據傳遞給函數的參數設置迷你紅綠燈的正確 LED。
void set_led(char *str){
if(strcmp(str,"verde")==0){
gpio_clear(red_pin);
gpio_clear(yellow_pin);
gpio_set(green_pin);
}
else if(strcmp(str,"rosso")==0){
gpio_clear(yellow_pin);
gpio_clear(green_pin);
gpio_set(red_pin);
}
else if(strcmp(str,"giallo")==0){
gpio_clear(red_pin);
gpio_clear(green_pin);
gpio_set(yellow_pin);
}
}
如果str為“verde”,則綠色 LED 亮起,其他 LED 熄滅。如果str為“giallo”,則黃色的打開,其他的關閉。如果str是“rosso”,則紅色的打開,其他的關閉。
mqtts_init函數:它初始化與 MQTT-SN 代理的連接,并使用函數sub訂閱主題“topic_in”(常量TOPIC_IN的值) 。
static char stack[THREAD_STACKSIZE_DEFAULT];
static msg_t queue[8];
static emcute_sub_t subscriptions[NUMOFSUBS];
static char topics[NUMOFSUBS][TOPIC_MAXLEN];
void mqtts_init(void){
/* the main thread needs a msg queue to be able to run `ping`*/
msg_init_queue(queue, ARRAY_SIZE(queue));
/* initialize our subscription buffers */
memset(subscriptions, 0, (NUMOFSUBS * sizeof(emcute_sub_t)));
/* start the emcute thread */
thread_create(stack, sizeof(stack), EMCUTE_PRIO, 0, emcute_thread, NULL, "emcute");
char * addr1 = "fec0:affe::99";
add_address(addr1);
con();
sub(TOPIC_IN);
}
以下函數用于初始化部分:
static void *emcute_thread(void *arg){
(void)arg;
emcute_run(BROKER_PORT, "board");
return NULL;
}
static int add_address(char* addr){
char * arg[] = {"ifconfig", "4", "add", addr};
return _gnrc_netif_config(4, arg);
}
static int con(void){
sock_udp_ep_t gw = { .family = AF_INET6, .port = BROKER_PORT };
char *topic = NULL;
char *message = NULL;
size_t len = 0;
ipv6_addr_from_str((ipv6_addr_t *)&gw.addr.ipv6, BROKER_ADDRESS);
if (emcute_con(&gw, true, topic, message, len, 0) != EMCUTE_OK) {
printf("error: unable to connect to [%s]:%i\n", BROKER_ADDRESS, (int)g w.port);
return 1;
}
printf("Successfully connected to gateway at [%s]:%i\n", BROKER_ADDRESS, (int)gw.port);
return 0;
}
函數sub用于訂閱作為參數傳遞的主題。
static int sub(char* topic){
unsigned flags = EMCUTE_QOS_0;
if (strlen(topic) > TOPIC_MAXLEN) {
puts("error: topic name exceeds maximum possible size");
return 1;
}
/* find empty subscription slot */
unsigned i = 0;
for (; (i < NUMOFSUBS) && (subscriptions[i].topic.id != 0); i++) {}
if (i == NUMOFSUBS) {
puts("error: no memory to store new subscriptions");
return 1;
}
subscriptions[i].cb = on_pub;
strcpy(topics[i], topic);
subscriptions[i].topic.name = topics[i];
if (emcute_sub(&subscriptions[i], flags) != EMCUTE_OK) {
printf("error: unable to subscribe to %s\n", topic);
return 1;
}
printf("Now subscribed to %s\n", topic);
return 0;
}
當在訂閱的主題(在本例中為主題“topic_in”)下接收到消息時,函數on_pub對其進行管理:
static void on_pub(const emcute_topic_t *topic, void *data, size_t len){
(void)topic;
char *in = (char *)data;
printf("### got publication for topic '%s' [%i] ###\n", topic->name, (int)topic->id);
for (size_t i = 0; i < len; i++) {
printf("%c", in[i]);
}
puts("");
char msg[len+1];
strncpy(msg, in, len);
msg[len] = '\0';
if (strcmp(msg, "open") == 0){
if(box_keys==0){
/*open box keys*/
servo_set(&servo, SERVO_MIN);
box_keys=1;
}
}
else if (strcmp(msg, "close") == 0){
if(box_keys==1){
/*close box keys*/
servo_set(&servo, SERVO_MAX);
box_keys=0;
}
}
}
如果收到的消息是“打開”,則通過伺服電機解鎖包含鑰匙的盒子,并將全局變量box_keys設置為 1。如果消息是“關閉”,則使用伺服電機鎖定盒子,并且全局變量box_keys設置為 0。函數的第一部分用于通過在終端上打印收到的消息及其相關主題來獲取反饋。
函數pub用于發布消息。
static int pub(char* topic,char* msg){
emcute_topic_t t;
unsigned flags = EMCUTE_QOS_0;
printf("pub with topic: %s and name %s and flags 0x%02x\n", topic, msg, (int)flags);
/* step 1: get topic id */
t.name = topic;
if (emcute_reg(&t) != EMCUTE_OK) {
puts("error: unable to obtain topic ID");
return 1;
}
/* step 2: publish data */
if (emcute_pub(&t, msg, strlen(msg), flags) != EMCUTE_OK) {
printf("error: unable to publish data to topic '%s [%i]'\n",t.name, (int)t.id);
return 1;
}
printf("Published %i bytes to topic '%s [%i]'\n", (int)strlen(msg), t.name, t.id);
return 0;
}
特別是,該函數的第二個參數是您要發布的消息,第一個參數是相關主題的名稱。
-
STM32
+關注
關注
2270文章
10897瀏覽量
355814 -
酒精測試儀
+關注
關注
0文章
12瀏覽量
6333
發布評論請先 登錄
相關推薦
便攜式酒精測試儀電路設計
【CANNON申請】藍牙酒精測試儀
如何采用89C52和MQ-3酒精濃度傳感器設計酒精濃度測試儀?
智能酒精測試儀設計研究
機械酒精耐磨測試儀的用途是什么,它的特點有哪些
基于單片機的酒精濃度測試儀的設計

酒精測試儀原理和酒精的代謝過程
語音芯片在酒精測試儀的應用
技術干貨 | 基于晶華微SD8114便攜式酒精測試儀方案

基于SD8114芯片的便攜式酒精測試儀應用方案
技術干貨 | 基于晶華微SD8114便攜式酒精測試儀方案

酒精測試儀的分類和功能原理介紹






 工商網監
工商網監
評論