") 汽車電子系統(tǒng)中傳感器融合方案
汽車電子系統(tǒng)中傳感器融合方案
目前,汽車已經(jīng)成為人們?nèi)粘3鲂惺褂米疃嗟慕煌üぞ摺榱吮WC司乘人員和行人的安全,輔助駕駛和自動駕駛越來越成為汽車的標準配置。從L1級別的ADAS應(yīng)用FCW(前向碰撞預(yù)警)、LDW(車道偏離預(yù)警)、L2級別的 AEB(自動緊急制動)、LKA(車道保持輔助)、到更高級別的ACC(自適應(yīng)巡航)、AVP(代客泊車系統(tǒng))等等, 輔助駕駛/自動駕駛在汽車電子系統(tǒng)中有著越來越大比例的應(yīng)用。為了實現(xiàn)性能更強、穩(wěn)定性更高和準確性更高的輔助駕駛、自動駕駛,汽車需要獲知本身的位置信息和周邊的環(huán)境信息,不同種類的傳感器,如視覺傳感器、激光傳感器(LiDAR)、毫米波傳感器(RADAR)等,在不同的工作環(huán)境下各有優(yōu)缺點,而融合來自多個傳感器數(shù)據(jù)的過程。可以提供更高的可靠性、冗余性以及最終的安全性。賽靈思作為可編程器件的領(lǐng)導(dǎo)品牌,在汽車電子系統(tǒng),尤其在傳感器融合方面提供了全面的方案。且待本文向您徐徐道來。
1. 融合! 融合起來!
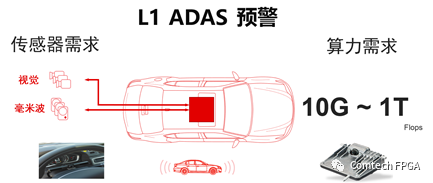
隨著輔助駕駛/自動駕駛的等級逐步提高,對傳感器種類和數(shù)量的要求會逐步增加。L1級別需求(如FCW(前向碰撞預(yù)警)、LDW(車道偏離預(yù)警)) 主要由單個傳感器,如單個視覺攝像頭、單個毫米波或攝像頭加毫米波的組合來實現(xiàn)相關(guān)預(yù)警功能:
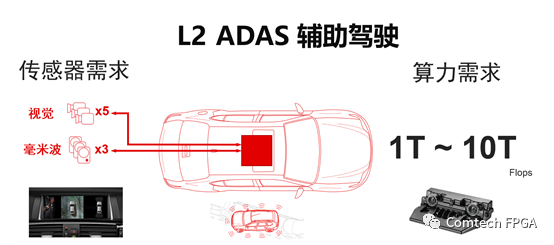
L2級別需求(AEB(自動緊急制動)、LKA(車道保持輔助)) ,因為需要對車身部分(如底盤的剎車控制系統(tǒng)) 進行直接控制,需要兩個或以上不同的傳感器來互相校驗,確保在各種環(huán)境下不錯過必須處理的信息,并加強冗余度,一般會有多個視覺攝像頭(比如由4個攝像頭組成360環(huán)視系統(tǒng),加上一個單獨用于前向預(yù)警的攝像頭,共計5個攝像頭的系統(tǒng))、一個或若干毫米波及其他傳感器完成輔助駕駛功能:
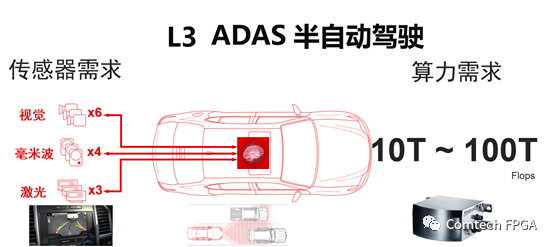
對于L3來講,由于高級別半自動駕駛(如代客泊車AVP)需要對地圖進行構(gòu)建,并進行基于地圖的路徑規(guī)劃,通常需要引入激光雷達(為解決盲區(qū),還需要布置高低位置的多個激光雷達),視覺、毫米波和激光雷達的數(shù)量總數(shù)基本會超過10個:
隨著高級輔助駕駛需要更多傳感器種類與數(shù)量,如何將這些信號歸一化為主控SoC需要的數(shù)據(jù),也就是傳感器數(shù)據(jù)歸一化(normalization)的需求如何實現(xiàn)呢?這就是我們提及的傳感器融合的需求了:
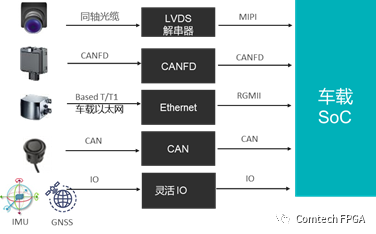
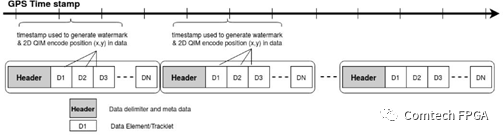
那么傳感器數(shù)據(jù)數(shù)據(jù)歸一化,具體來說要如何進行呢?我們由下圖來解釋一下:
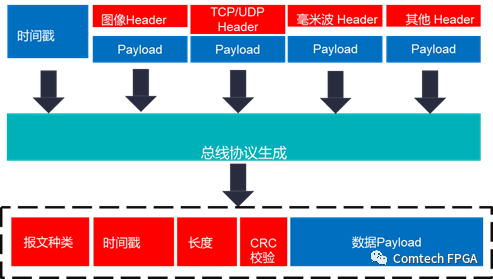
將多個傳感器數(shù)據(jù)的負載(Payload), 統(tǒng)一打包為包含報文種類、時間戳(Time Stamp)、其他包頭信息和負載的數(shù)據(jù)包,傳送至主控芯片,就是傳感器融合的信息了。
我們來總結(jié)一下傳感器融合的作用:
A 獲取車輛環(huán)境信息;
B 獲得更精確的結(jié)果;
--均衡不同傳感器的權(quán)重
--針對傳感器失效的魯棒性
--各傳感器取長補短
C 主要任務(wù)
--定位
--地圖繪制
--路徑規(guī)劃
2. 當融合時且融合
當我們意識到傳感器融合的優(yōu)勢時,就會發(fā)現(xiàn)FPGA在傳感器融合上的優(yōu)勢:
--FPGA的IO Pin可以靈活配置,適合不同的傳感器接口
--FPGA的邏輯可以靈活設(shè)計,針對不同型號的傳感器做出針對性的設(shè)計。
而傳感器融合的基石,就是如何進行數(shù)據(jù)同步!
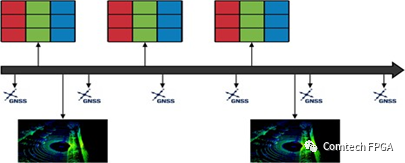
如果不進行同步的話,假設(shè)有一個目標高速經(jīng)過車輛前部,如果各傳感器不同步,不同的傳感器會給出不同的目標方位和相對距離信息,會令處理系統(tǒng)很難做出正確響應(yīng):
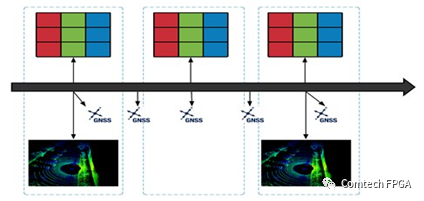
但如果進行了同步,所有觀感器信息反饋的信息都是基于同一時間點,針對同一個目標反饋的目標速度、相對距離、角度等信息也不會產(chǎn)生混淆:
針對上述的同步,具體方式如下:
1. 硬件同步 / Hardware synchronization
--使用同步觸發(fā)(trigger acquisition, FPGA的強項之一哦!)
--所有傳感器使用同一個硬件給出的時鐘源(FPGA的IO資源非常適合做配置!).
2. 軟件同步 / Software synchronization
--使用時間戳(timestamp ) 同步
--每個傳感器自行加入校正后的時間戳
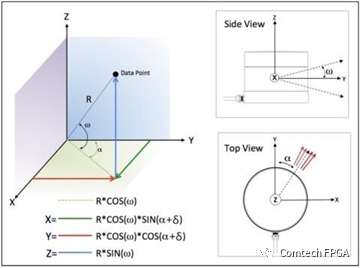
3. 空間同步 / Spatial synchronization
將各傳感器坐標系統(tǒng)歸一化為統(tǒng)一系統(tǒng)(對坐標系轉(zhuǎn)換的硬件加速也是FPGA的強項!)
4. 時空同步 / Spatiotemporal synchronization
--以上所有同步的綜合
下面也給出一些使用FPGA進行同步的技術(shù)技巧:
1. 統(tǒng)一的的坐標系與時鐘;
2. 使用GPS提供時間戳的時鐘同步與校準;
3. 一般使用激光雷達提供Trigger , 作為數(shù)據(jù)對齊基礎(chǔ);
--這是自動駕駛技術(shù)的歷史傳承,基于ROS / ROS2 的 Autoware, Baidu的Apollo及其他開源版本都是如此。
4. 傳感器相互之間進行校正 ( Sensorcalibration );
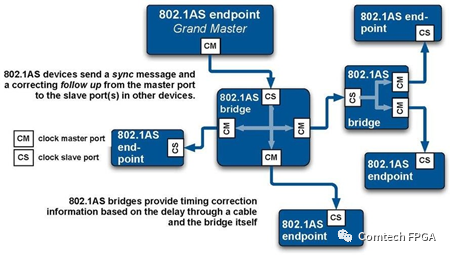
同步后數(shù)據(jù),如何通過網(wǎng)絡(luò)在車內(nèi)網(wǎng)絡(luò)傳輸,也是傳感器融合的重要功能,而TSN (時鐘同步網(wǎng)絡(luò)) 更是會助力融合更好地進行!
基于802.1 AS的TSN我們在之前的文章中已經(jīng)有介紹,如有您有在賽靈思器件上實現(xiàn)TSN的需求,也請聯(lián)系科通,我們?yōu)槟峁┳稍兒椭С帧?/p>
3. 如何十分安全地融合?
既然傳感器融合主要用于汽車應(yīng)用,功能安全就變得非常重要!針對功能安全的需求,作為可編程器件領(lǐng)先品牌,賽靈思針對各行業(yè)的安全需求,提供了由原廠或第三方提供的服務(wù):
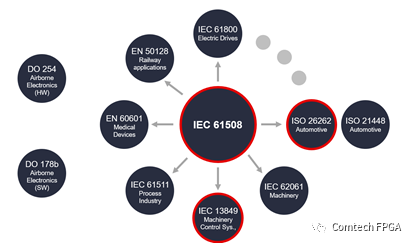
其中和汽車相關(guān)的 IEC-61508和 ISO-26262認證,賽靈思都提供原廠直接支持的文檔、工具和服務(wù)。
當然還有經(jīng)過車規(guī)驗證的各型號SOC/FPGA、IP、工具鏈和參考設(shè)計開發(fā)板,如果您有需求,都歡迎聯(lián)系科通哦!

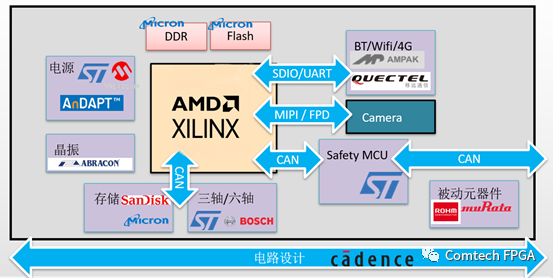
4. 有科通,融合更方便
針對車規(guī)需求,我們集成科通代理的相關(guān)產(chǎn)線,為您提供整體方案。下圖也只是其中一部分哦!
原文標題:基于賽靈思的傳感器融合方案
文章出處:【微信公眾號:Comtech科通】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2551文章
51163瀏覽量
754120 -
汽車電子
+關(guān)注
關(guān)注
3026文章
7972瀏覽量
167136 -
賽靈思
+關(guān)注
關(guān)注
32文章
1794瀏覽量
131305
原文標題:基于賽靈思的傳感器融合方案
文章出處:【微信號:comtech_inc,微信公眾號:Comtech科通】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
GND在傳感器應(yīng)用中的角色
松下汽車電子系統(tǒng)與Arm達成戰(zhàn)略合作
電子耦合在新型傳感器中的應(yīng)用
電流傳感器在電源系統(tǒng)中的應(yīng)用
西門子EDA發(fā)布下一代電子系統(tǒng)設(shè)計平臺
數(shù)據(jù)傳感器聚合器子系統(tǒng)設(shè)計

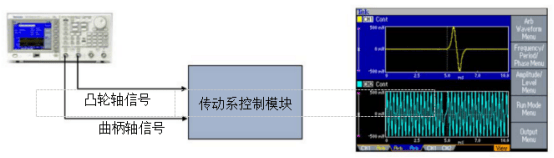
泰克信號發(fā)生器在仿真汽車傳感器信號的應(yīng)用
X定義下的車載電子系統(tǒng)
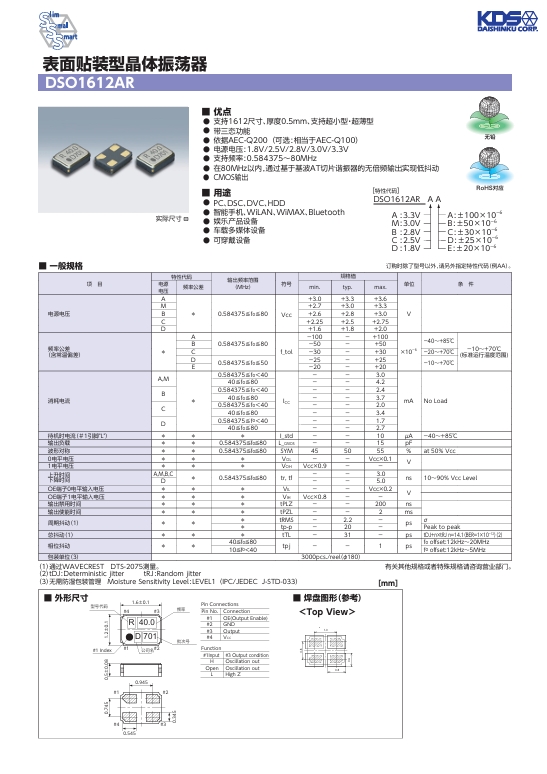
表面貼裝型晶體振蕩器 汽車電子用 DSO1612AR:汽車電子系統(tǒng)的精密時基之源
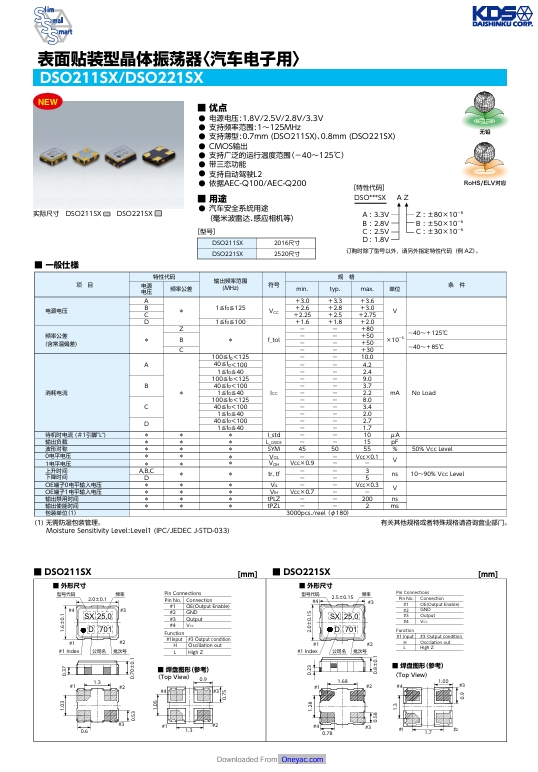
表面貼裝型晶體振蕩器 汽車電子用 DSO221SX/DSO211SX:汽車電子系統(tǒng)的精準時間之源
使用泰克示波器精確診斷并優(yōu)化汽車電子系統(tǒng)

24芯M16插座在汽車電子系統(tǒng)中的關(guān)鍵作用

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
示波器高壓探頭在汽車電子的應(yīng)用方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論